

Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования «Магнитогорский государственный технический университет им. Г.И. Носова»
Кафедра АЭПиМ
Лабораторные работы
по дисциплине: «Системы управления электроприводом»
Выполнил:
Проверил:
канд. техн. наук, доцент
Шохин В. В.
Магнитогорск 20__
Лабораторная работа № 1: «исследование разомкнутой системы тп-д»
Цель работы: экспериментальное изучение регулировочных свойств, статических и динамических характеристик разомкнутой системы управления, изучение влияния возмущающих воздействий на качество управления, определение экспериментальным путем параметров системы регулирования.

Рисунок 1.1 – Принципиальная электрическая схема лабораторного стенда
Порядок выполнения работы
На силовой панели собрать электрическую схему силовой цепи (Рисунок 1.1).
На панели регуляторов собрать принципиальную электрическую схему системы управления без обратных связей (Рисунок 1.3).
Включение лабораторной установки производить в следующем порядке:
- потенциометры Uрег1 и Uрег2 на панели регуляторов установить в крайнее левое положение;
- при необходимости включить тумблер питания панели регуляторов;
- на панели управления включить автоматические выключатели В1, В2 и В3;
- последовательно нажать кнопки «цепи управления», «питание регуляторов», «возбуждение», «~ 220 ТП1», «Вкл. ТП1», при формировании нагрузки нажать кнопки «~ 220 ТП2», «Вкл. ТП2»; включение цепей проконтролировать по загоранию контрольных ламп. Отключение стенда осуществляется кнопкой АК1.
Снятие статических характеристик разомкнутой системы.
Характеристики разомкнутой системы необходимо снимать при коэффициенте передачи регулятора Крс, равном Крс = Uрс/Uзс = 1 (Rос=30 кОм, Сос=0 мкФ).
Для снятия характеристик тиристорного преобразователя ТП1, выход ТП1 необходимо подключить к параллельно соединенным резисторам Rдоб1 и Rдоб2 через шунт ШЗ (работа на активную нагрузку). На вход Uлпу ТП1 подать напряжение +15 В, на вход Uу ТП1 подать регулируемое напряжение с потенциометра Uрег1 положительной полярности. Плавно изменяя величину Uрег1 до достижения напряжения Ud1 = 220 – 230 В, снять показания приборов и занести их в таблицу 1.1.
По данным табл. 1.1 построить зависимости Ud1 = f(Uу), Кп = f(Uу), UВЫХДН = f(Ud), постоянную времени ТП1 принять равной Тп = 0,01 с (или задается преподавателем)
Таблица 1.1 Регулировочные характеристики ТП1
|
Измерено |
Вычислено |
Примечание |
|||
№ п/п |
Ud1,В |
UВЫХДН ,В |
Uу,В |
КП |
КДН |
КДН = ∆UВЫХДН/ ∆Ud
Кп = ∆Ud1/∆Uу |
|
V1 |
V8 |
V7 |
|
|
|
1 |
15 |
0,7 |
1 |
|
|
|
2 |
30 |
1 |
2 |
15 |
0,02 |
|
3 |
50 |
1,9 |
3 |
20 |
0,045 |
|
4 |
80 |
2,8 |
4 |
30 |
0,03 |
|
5 |
110 |
3,8 |
5 |
30 |
0,033 |
|
6 |
140 |
4,8 |
6 |
30 |
0,033 |
|
7 |
180 |
6 |
7 |
40 |
0,03 |
|
8 |
210 |
7 |
8 |
30 |
0,033 |
|
9 |
240 |
7,9 |
9 |
30 |
0,03 |
|

Рисунок 1.2 ‑ Принципиальная электрическая схема панели силовой (цепи управления)
Регулировочные характеристики разомкнутой системы снимать при двух значениях якорного тока М1 (Ia = 5 А и Ia = 10 А). Для получения неизменного якорного тока М1, тиристорный преобразователь ТП2 переключателем ПП4 на панели управления переключить в режим РИТ (регулируемый источник тока). Переключатель ПП1 поставить в режим ТГ2, а потенциометр R14 в крайнее левое положение (исключается регулировка момента нагрузки от скорости М1). Переключателем ППЗ и потенциометром R15 преобразователь ТП2 перевести в инверторный режим, а в якорной цепи М1 установить заданный ток. Изменяя Uрег1 от -10 до +10В через 1 В при Ia = const занести показания приборов в таблицу 1.2.
По данным табл. 1.2 построить зависимости Ud1 = f(Uз), Uтг1 = f(ω1).
Таблица 1.2 ‑ Регулировочные характеристики разомкнутой системы
№п/п |
Измерено |
Вычислено |
|
||||||||||||||||
Uз, В |
Ud1, В |
n, об/мин |
UТГ1, В |
ω1, 1/с |
Rэ, Ом |
Rп, Ом |
Кос, Вс |
Примечание |
|||||||||||
V7 |
V1 |
V5 |
V8 |
|
|
|
|
|
|||||||||||
Ia1 = 10 A |
1 |
1 |
-38 |
-580 |
-4,2 |
-60,7 |
1,56 |
0,668 |
|
Iв1 =0,9
Iв2 =0,86
Кос= ∆UТГ1 /∆ω1
|
|||||||||
2 |
1,5 |
-20 |
-400 |
-3 |
-41,9 |
0,064 |
|||||||||||||
3 |
2 |
46 |
440 |
3,3 |
46,1 |
0,072 |
|||||||||||||
4 |
2,5 |
78 |
850 |
6 |
89,0 |
0,063 |
|||||||||||||
5 |
3 |
104 |
1220 |
8,7 |
128 |
0,070 |
|||||||||||||
Ia1 = 5 A |
6 |
1 |
-14 |
-410 |
-3,1 |
-42,9 |
|
||||||||||||
7 |
1,5 |
4 |
15 |
0,1 |
1,57 |
0,072 |
|||||||||||||
8 |
2 |
43 |
480 |
3,8 |
50,3 |
0,076 |
|||||||||||||
9 |
2,5 |
85 |
1000 |
7,1 |
105 |
0,061 |
|||||||||||||
10 |
3 |
107 |
1250 |
9 |
131 |
0,073 |
|||||||||||||
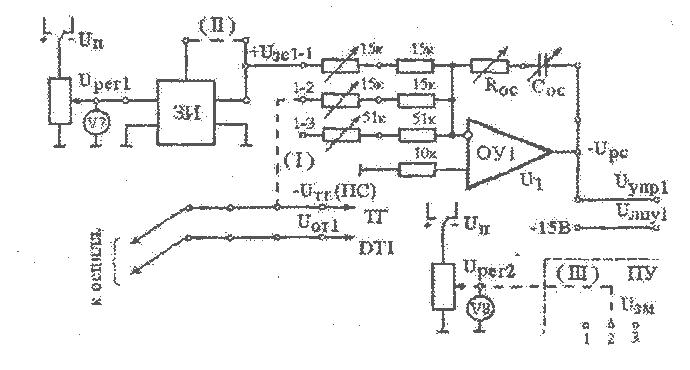
Рисунок 1.3 ‑ Структурная схема системы управления
Электромеханические и внешние характеристики разомкнутой системы снимать при Uрег1 = Uз = const и Ia1 = var. Изменение нагрузки на валу испытуемого двигателя через нагрузочный агрегат ТП2 – М2 производить с помощью переключателя ППЗ и потенциометра R15. Якорный ток машины М1 изменять от 2 до 10 А через 2 А, далее через 5 А до 25 А. Данные эксперимента занести в табл. 1.3. Количество снимаемых характеристик и величины скоростей холостого хода задаются ведущим преподавателем.
По данным таблицы 1.3 построить зависимости Ud1 = f(Ia1) - все характеристики построить на одном графике, ω1 = f(Ia1) - все характеристики построить на одном графике, Uдт1 = f(Ia1), Uдт2 = f(Ia2).
Таблица 1.3 ‑ Электромеханические и внешние характеристики
№ п/п |
Измерено |
Вычислено |
Примечание |
||||||||
Ud1, В |
Ia1, A |
Ia2, A |
n, об/мин |
Uдт1, B |
Uдт2, B |
ω1, 1/с
|
Kдт1, В/А
|
Kдт2, В/А
|
|||
|
V1 |
A1 |
A2 |
V5 |
V7 |
V8 |
|
||||
1 |
145 |
2 |
-0,3 |
1800 |
0,6 |
-0,1 |
188 |
|
|
||
2 |
120 |
4 |
0,3 |
1490 |
1,2 |
0,1 |
156 |
0,3 |
0,33 |
||
3 |
120 |
6 |
2,5 |
1400 |
1,8 |
0,8 |
147 |
0,3 |
0,32 |
||
4 |
120 |
8 |
4,2 |
1400 |
2,5 |
1,4 |
147 |
0,35 |
0,35 |
||
5 |
118 |
10 |
5,9 |
1350 |
3,1 |
1,9 |
141 |
0,3 |
0,29 |
||
6 |
118 |
15 |
8,5 |
1300 |
4,5 |
2,7 |
136 |
0,28 |
0,31 |
||
7 |
114 |
20 |
12,2 |
1230 |
6,1 |
3,9 |
129 |
0,32 |
0,32 |
||
8 |
110 |
25 |
15,2 |
1200 |
7,6 |
5 |
126 |
0,3 |
0,37 |
||
 6 В
6 В 0,9 A
0,9 A 0,9 A
0,9 A

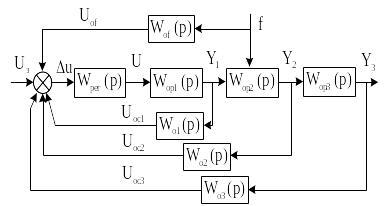
Рисунок 1.4 ‑ Принципиальная электрическая схема системы управления
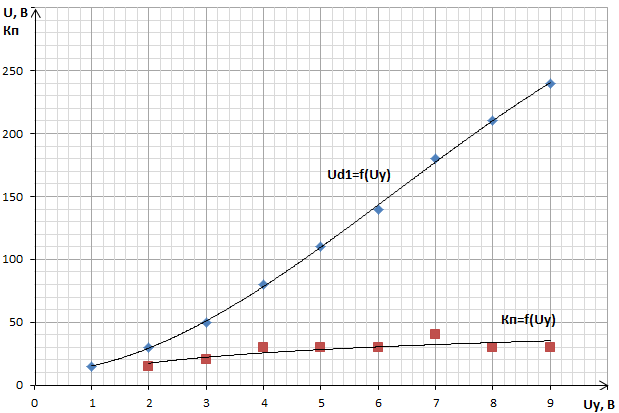
Рисунок 1.5 – Зависимости выпрямленного напряжения на выходе тиристорного преобразователя ТП1 (Ud1) и коэффициента передачи тиристорного преобразователя ТП1 (Kп=∆Ud1/∆Uу) от напряжения управляющего воздействия (Uу)
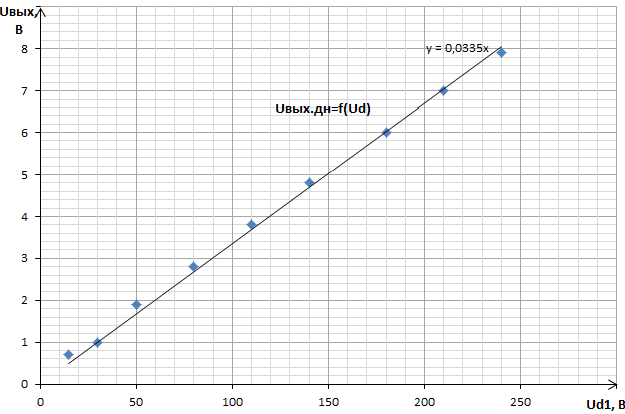
Рисунок 1.6 – Зависимость выходного напряжения (на датчике напряжения) (Uвых.дн) от выпрямленного напряжения тиристорного преобразователя ТП1 (Ud1)
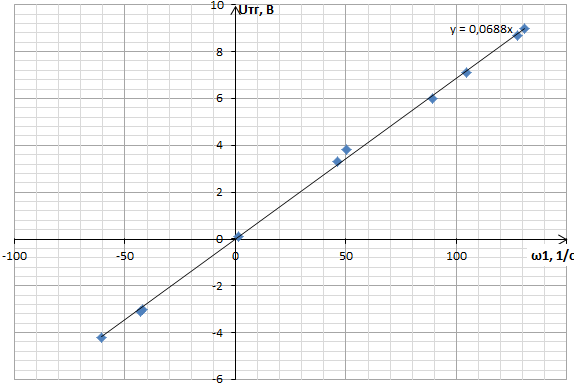
Рисунок 1.7 – Зависимость напряжения тахогенератора (Uтг) от скорости вращения двигателя (w1)
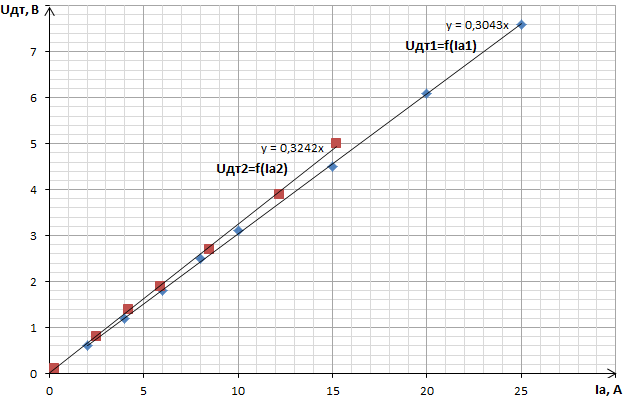
Рисунок 1.8 ‑ Зависимости напряжения на датчиках тока Uдт1 и Uдт2 от тока якоря Ia1 и Ia2 соответственно
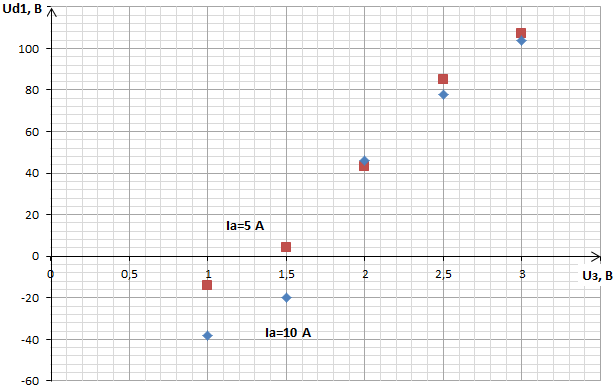
Рисунок 1.9 ‑ Зависимости выпрямленного напряжения тиристорного преобразователя ТП1 (Ud1) от напряжения задания (Uз)
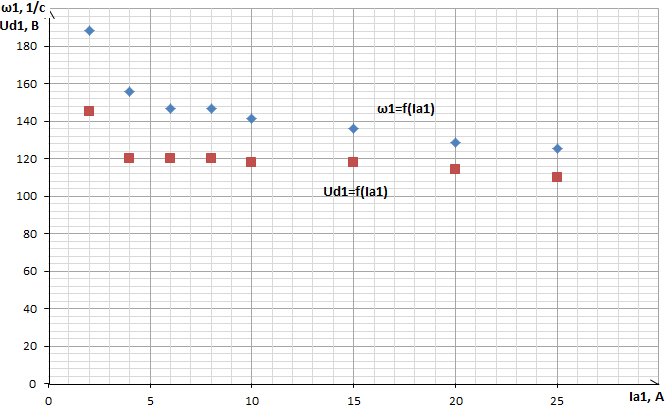
Рисунок 1.9 – Зависимость скорость вращения двигателя (w1) и напряжения на ТП (Ud1) от тока якоря (Ia1)
Вывод:
Построены электромеханическая и внешняя характеристики двигателя. А также внешняя характеристика тиристорного преобразователя. Определены следующие параметры системы регулирования: коэффициент передачи тиристорного преобразователя (Kп=Ed0/Uy.max=26,6); коэффициент обратной связи по напряжению (Kон=Uдн.max/Ud.max=0,033); коэффициенты усиления первого и второго датчиков тока (Kдт1=Uдт1/I1=0,3 Kдт2=Uдт2/I2=0,32); коэффициент обратной связи по скорости (Кос=Uтг/w1=0,069).