

Введение
Что-то красиво написано
Составление схемы нагружения
Составление схемы нагружения начинается с расстановки действующих в этой схеме сил. Для примера рассмотрим промежуточный вал 5 типа редуктора (двухступенчатый цилиндрический редуктор; тихоходная ступень – прямозубая, быстроходная – косозубая), представленный на рисунке 1.
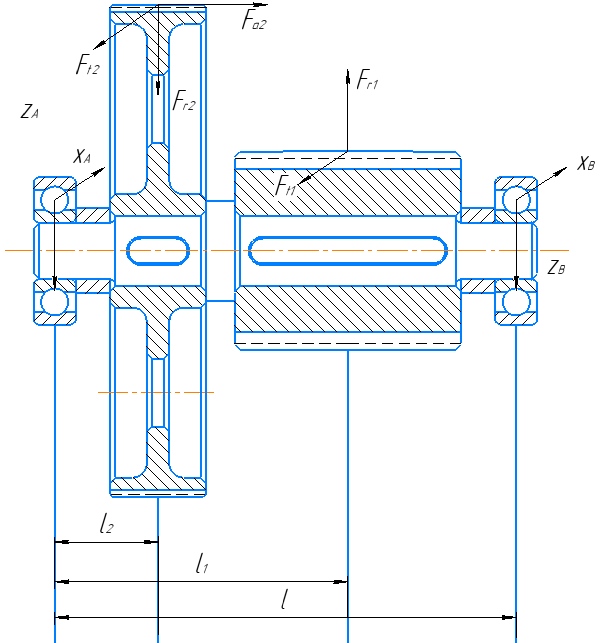
Рис.1
Опорами
при расчёте вала будут являться
подшипники. Силы реакции в опорах будут
приложены к центру шарика подшипника.
Считается, что усилия, действующие в
зацеплении, распределены равномерно
по линии контакта, следовательно, на
схеме нагружения соответствующие силы
приложены к середине зубчатого колеса.
Для удобства выполнения расчетов валов
и подшипниковых узлов, усилие, действующее
в зоне контакта зубьев
 ,
представляют в виде составляющих, в
общем случае действующих по трем
взаимно-перпендикулярным направлениям:
по касательной к начальным окружностям
- окружной силы
,
представляют в виде составляющих, в
общем случае действующих по трем
взаимно-перпендикулярным направлениям:
по касательной к начальным окружностям
- окружной силы
 ,
по радиусу - радиальной сил
,
по радиусу - радиальной сил
 ,
параллельно оси зубчатых колес - осевой
силы
,
параллельно оси зубчатых колес - осевой
силы
 .
.
Для прямозубой и косозубой цилиндрической передачи система сил действующих в зацеплении представлена формулами 1 и 2 соответственно.
Где
 – стандартный угол зацепления. Крайне
важно учесть, что в формулах 1 и 2
– стандартный угол зацепления. Крайне
важно учесть, что в формулах 1 и 2
 -
момент на шестерне пары зубчатых колес,
образующих элементарную передачу.
-
момент на шестерне пары зубчатых колес,
образующих элементарную передачу.
Расстояния
от точки опоры до действующих сил на
рисунке 1 обозначены как
 .
Стоит обратить внимание, что плечом для
осевой
силы
будет являться радиус зубчатого колеса.
.
Стоит обратить внимание, что плечом для
осевой
силы
будет являться радиус зубчатого колеса.
Определение сил реакции в опорах
Для того, чтобы система находилась в равновесии необходимо соблюдение условия равновесия:

Для определения сил реакции в опоре А, составляется уравнение моментов относительно неподвижной точки В. Для удобства, примем за точку А левый подшипник, а за точку В – правый. Тогда уравнение моментов в общем виде (без учёта знака) будет выглядеть следующим образом:

Уравнение
3 не имеет решений, т.к. содержит два
неизвестных –
 и
и
 .
Для того, чтобы решить данное уравнение,
необходимо рассмотреть его в двух
плоскостях: XOY
и ZOY.
Таким образом, из уравнения 3 вытекают
уравнения 4, 5, имеющие в своём составе
по одному неизвестному.
.
Для того, чтобы решить данное уравнение,
необходимо рассмотреть его в двух
плоскостях: XOY
и ZOY.
Таким образом, из уравнения 3 вытекают
уравнения 4, 5, имеющие в своём составе
по одному неизвестному.
Реакции в опоре В находят аналогичным образом.
Для проверки правильности найденных значений сил реакции в опорах, необходимо просуммировать все силы по соответствующим осям с учётом знака. Если полученная сумма равна нулю, то найденные значения сил соответствуют условию равновесия.
Плоскость XOY
В плоскости XOY находятся окружные силы , и сила . Составляя уравнение для плоскости XOY с учётом направления осей получаем:

Плоскость ZOY
В плоскости ZOY находятся радиальные силы , осевая силы и сила . Составляя уравнение для плоскости ZOY с учётом направления осей получаем:

При составлении уравнения относительно неподвижной точки В следует помнить, что сила будет уже с противоположным знаком.
Определение суммарной реакции в опорах
Суммарная реакция в опорах находится согласно формуле 6.

Определение изгибающих моментов
Под колесом
Моменты под колесом определяются согласно формулам 7-9.


Под шестерней
Моменты под шестерней определяются согласно формулам 10-12.


Суммарный момент
Суммарные моменты определяются согласно формулам 12-14.



Расчёт подшипников
Определение осевых сил, действующих на подшипник
Конструктивная
особенность узлов с радиальными и
радиально-упорными однорядными
шарикоподшипниками такова, что внешнюю
осевую нагрузку
 воспринимает лишь одна опора. При этом
следует учесть, что данные виды подшипников
должны иметь осевой зазор близкий к
нулю. Для удобства расчётов примем, что
в рассчитываемой схеме нагружения
осевой зазор шарикоподшипника равен
нулю, в таком случае условие равновесия
внутреннего кольца подшипника имеет
вид:
воспринимает лишь одна опора. При этом
следует учесть, что данные виды подшипников
должны иметь осевой зазор близкий к
нулю. Для удобства расчётов примем, что
в рассчитываемой схеме нагружения
осевой зазор шарикоподшипника равен
нулю, в таком случае условие равновесия
внутреннего кольца подшипника имеет
вид:

Где
 для нулевого зазора, а
для нулевого зазора, а
 – число тел качения. В этом случае будет
нагружена половина тел качения и в точке
контакта нагруженного тела с кольцом
возникает осевая сила равная:
– число тел качения. В этом случае будет
нагружена половина тел качения и в точке
контакта нагруженного тела с кольцом
возникает осевая сила равная:

Где
индекс «i» равен числу нагруженных тел
качения,
 – угол контакта.
– угол контакта.
Из формул 15 и 16 вытекает, что суммарная осевая нагрузка, обусловленная действием радиальной силы равна:

Исходя
из схем нагружения (рис. 2) видно, что
 ,
т.к.
,
т.к.
 .
Поскольку угол
и число тел качения являются
стандартизованными величинами, получаем:
.
Поскольку угол
и число тел качения являются
стандартизованными величинами, получаем:

Рис.2.
Схема распределения сил между телами
качения
 через e’,
окончательно имеем:
через e’,
окончательно имеем:

где e’= e – для радиально-упорного шарикоподшипника,
Величина e – параметр осевого нагружения, пропорциональный углу контакта . Таким образом, минимальная осевая сила, необходимая для регулируемого радиально-упорного подшипника, работающего с нулевым зазором при установившемся температурном режиме, равна

Особенности расчёта радиальных ( = 0) и радиально-упорных шарикоподшипников с углами контакта = (1116) состоят в том, что для таких подшипников фактический угол контакта зависит от радиального зазора и деформаций, пропорциональных отношению Fа /Fr, и является переменной величиной.
Для
радиальных шарикоподшипников (α = 0˚)
при известном значении
зависимость
 можно представить в виде:
можно представить в виде:
Где
 – статическая грузоподъёмность,
находится из гостов.
– статическая грузоподъёмность,
находится из гостов.
Для
радиально-упорных шарикоподшипников
с углами контакта
= (11…16)
и неизвестной
 предварительное значение e определяют
по формуле:
предварительное значение e определяют
по формуле:
Затем после определения для обеих опор окончательное значение величины e находят таблицы 1.
Таблица 1.
Тип подшипника |
Угол ,… |
e |
|
e |
||
X |
Y |
X |
Y |
|||
Шариковый радиальный |
0 |
0,518 |
1 |
0 |
0,56 |
|
Шариковый радиально-упорный |
11…16 |
0,631 |
1 |
0 |
0,45 |
|
18…20 |
0,57 |
1 |
0 |
0,43 |
1 |
|

е
е
0,19
0,19

0,3
0,3
Продолжение таблицы 1.
|
24…26 |
0,68 |
1 |
0 |
0,41 |
0,87 |
28…36 |
0,95 |
1 |
0 |
0,37 |
0,66 |
|
Роликовый радиально-упорный |
|
1,5 tg |
1 |
0 |
0,40 |
0,4 ctg |