

Методическое пособие 612
.pdfи потоковых EF (рис. 1.15, б) Vf E f (t) переменных. Здесь Ep (t) и Ef (t) — произвольные функции.
Линейная модель управляемого источника может быть записана в общем виде
a1Vp a2Vf a3VI 0 . |
(1.16) |
Принимая a1 0 , модель управляемого источника EFU
потоковой переменной будет иметь вид, показанный на рис. 1.16, а. При а2 = 0 получим модель"управляемого источника EPU потенциальной переменной (рис. 1.16, б). В роли информационной переменной может также выступать переменная любой ветви. Введенные понятия позволяют найти решение и модель цепи.
Решением цепи, или решением модели цепи, V будем называть значения совокупности переменных, действующих на связях компонентов K1,..., Kl цепи, т. е.
l ni
V( [IKj i ])
i1 j 1
Внастоящей работе используется следующее правило установления порядка переменных в векторе (одномерном массиве) V:
Рис. Рис.
на основе узлового топологического закона равенства одноименных потенциальных переменных потенциальные переменные связей заменяются узловыми потенциальными переменными;
потенциальные переменные информационных и элементарных связей получают в V индексы соответствующих узлов;
потоковые переменные элементарных связей получают индексы соответствующих ветвей из списка С (См);
потоковые и потенциальные переменные векторных связей нумеруются в соответствии с установленным порядком типов переменных V1, ..., VQ. Первая потоковая (потенциальная) переменная получает индекс ветки (узла). Последующие типы переменных нумеруют последовательно для каждого типа числами натурального ряда, начиная с Smax Ymax 1, где Smax - максимальный номер ветви; Ymax — максимальный номер узла в С (См). Порядок переменных устанавливают с помощью номеров ветвей для потоковых и номеров узлов для потенциальных переменных.
Очевидно, что модель цепи можно рассматривать как совокупность моделей компонентов, в которых индексы переменных связей заменены на индексы соответствующих переменных из решения цепи V, и узловых топологических законов равенства нулю суммы одноименных потоковых переменных, т. е. линейных алгебраических уравнений.
Задача автоматизированного моделирования заключается в построении математической модели М [См] цепи См по заданному списковому представлению С [См] и поиске решения V этой модели.
1.2. Классификация моделей компонентов и цепей
20 |
21 |

Основой любой классификации [6] является деление механических систем на одномерные (поступательные и вращательные) и многомерные. Многомерные системы могут содержать низшие и высшие кинематические пары. Более подробная классификация учитывает число степеней свободы, предоставляемых кинематическими парами в относительном движении твердых тел. Кинематические пары делятся на од- но-, двух-, трех-, четырех - и пятиподвижные [17].
На основе принципов классификации механических систем вводится классификация механических цепейи и их компонентов.
Будем полагать, что компоненты механических цепей классифицируются на основе физических, топологических и математических признаков. Физические признаки определяют внутренние свойства компонентов или характеристики переменных связей. Выделяются инерционные и безынерционные, информационные и энергетические, непрерывные и дискретные компоненты. Признаки переменных связей характеризуют: тип движения (поступательное, вращательное, смешанное); зависимость от времени; амплитуду изменения. К физическим относятся также признаки, определяющие режимы работы (кинематический, статический, динамический) компонентов и цепей.
Топологические признаки: число и ориентация связей, типы связей (информационные, элементарные, векторные)— определяют графическое представление компонентов и механических цепей.
Математические признаки связаны с характером уравнений математических моделей. Можно отметить линейные, нелинейные и дифференциальные уравнения. Линейные модели инерционных компонентов (во временной форме) содержат производные по времени (линейные дифференциальные
уравнения). На основе преобразования Лапласа такие модели могут быть представлены в частотной форме, т. е. в виде линейных алгебраических уравнений относительно действительных и мнимых составляющих переменных.
Введем следующие обозначения признаков: K —кине- матический режим; S — статический режим; D — динамический режим; R — вращательное движение; Р — поступательное движение; — инерционность; V — векторные связи; Е — элементарные связи; I — информационные связи; Т— зависимость от времени; — зависимость от частоты; L
— линейность.
Далее надчерк будет означать отсутствие признака. Класс цепи задается совокупностью признаков. Так, на-
пример, ELDP — линейная динамическая цепь поступательного движения, компоненты которой имеют элементарные связи, a VNDPR — нелинейная динамическая цепь с векторными связями компонентов, участвующих в поступательном и вращательном движении.
Введенную классификацию можно проиллюстрировать с помощью рис. 1.17. Тип движения твердых тел определяется параметром NSV, а подвижность цепи — параметром NSe
(число степеней свободы кинематических узлов).
23
22
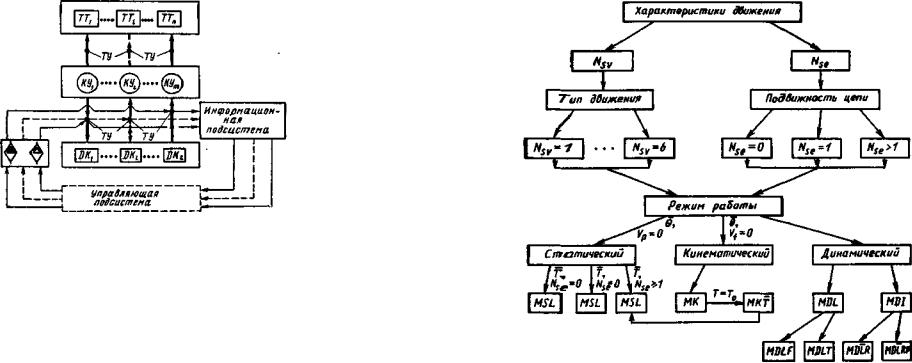
Рис. 1.17
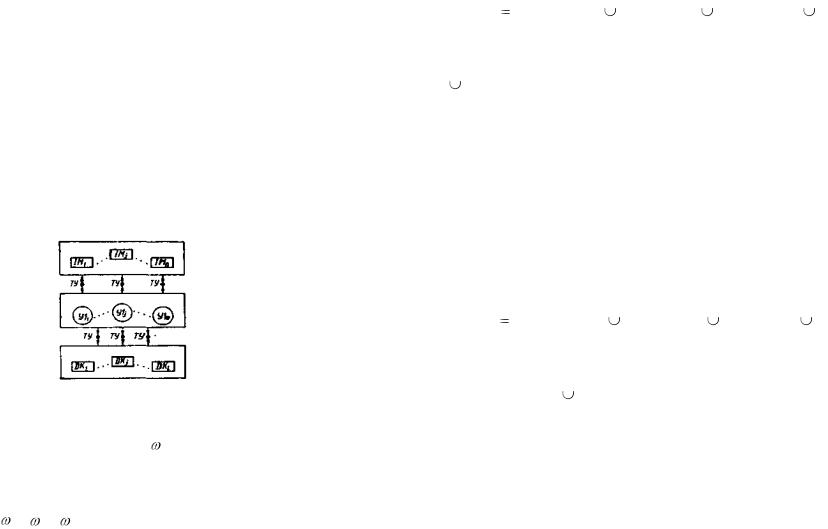
Графическое представление механической цепи Г (См) приведено на рис. 1.18, где ТТ — твердыетела, KY — кинематические узлы, TY —
Рис. |
топо- |
|
логические узлы; DK. — динамические компоненты. Рассмотрим представление некоторых важных в практи-
ческом отношении классов механических цепей.
Каждое твердое тело IM в одномерной цепи (рис. 1.19) имеет одну степень свободы (участвует только в поступательном или вращательном движении). Векторные связи являются элементарными. Кинематическими узлами служат узлысумматоры скоростей.
Многомерные цепи включают трехмерные цепи поступательного, вращательного и плоского движения, а также пространственные цепи.
25
24
В трехмерных поступательных цепях твердые тела имеют три поступательные степени свободы. В трехмерных вращательных механических цепях, например гироскопических, поступательным движением твердых тел обычно пренебрегают, поэтому векторным связям компонентов такой цепи соответствует только угловая скорость со и момент силы М. Каждая векторная связь может быть представлена эквивалентно тремя элементарными связями, соответствующими проекциям вращательного движения на оси, связанной с телом системы координат.
В трехмерных механических цепях с плоским движением твердые тела перемещаются в параллельных плоскостях. Примером могут служить шарнирно-рычажные механизмы.
Рис. 1.19
Векторные связи компонентов — линейные скорости vx, vy и силы Fх, Fy, а также угловая скорость z и момент силы
Mz.
В пространственных цепях твердые тела могут иметь до шести степеней свободы. Векторным связям соответствуют переменные vx, vy, vz, х, y , z , Fx, Fy, Fz, Мх, M y , Мz.
Наиболее общим режимом работы механических цепей является динамический режим. Модель динамической цепи М. [См] включает в себя уравнения
M[CM ] {( M[TTi ]) |
( M[KYj ]) |
( M[DKk ]) |
i |
j |
k |
( M[TYl ])},
l
т. е. модели твердых тел, кинематических узлов, динамических компонентов и топологических узлов.
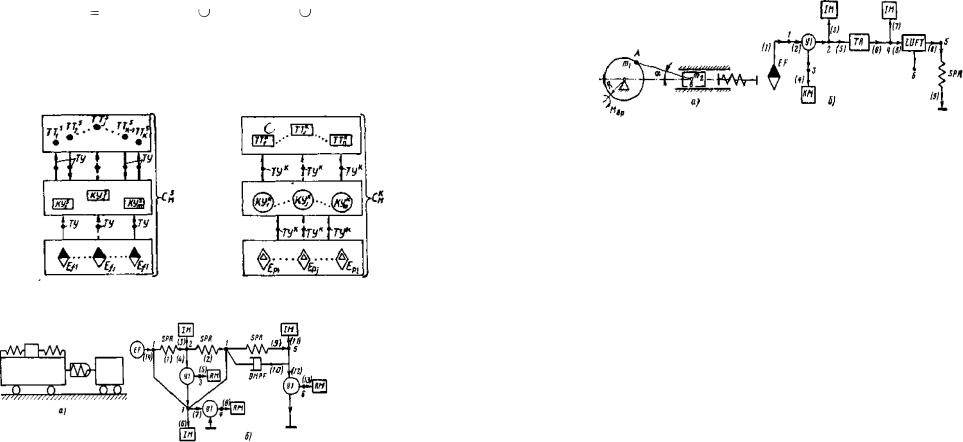
В статическом режиме изучаются законы равновесия системы тел. Задача моделирования статических механических цепей См возникает при расчете ферм, строительных конструкций и т. д. В моделях компонентов статических цепей не учитываются инерционные свойства (признак 0), а также потенциальные переменные, т. е. скорости. Модель статической цепи (рис. 1.20) имеет вид
M[CMs ] {( M[TTi s ]) |
( M[KYjs ]) |
( M[E fk ]) |
i |
j |
k |
( M[TYl ])} ,
l
т. е. включает в себя модели твердых тел и кинематических узлов в статическом режиме, топологических узлов и источников потоковых переменных (сил и моментов сил) Ef. В кинематическом режиме не учитываются инерционность компонентов и потоковые переменные (силы и моменты сил) (рис. 1.21). Определяются линейные и угловые скорости. Мо-
дель кинематической цепи CMK имеет вид
26
M[CMk ] {( M[TTi k ]) |
( M[KYjk ]) |
( M[Epk ])} |
i |
j |
k |
т. е. включает в себя модели твердых тел и кинематических узлов в кинематическом режиме и источников потенциальных (линейных и угловых скоростей).
Рис. 1.20 |
Рис. 1.21 |
Рис.1.22
Р
Рис. 1.23
Необходимость учета частных режимов (статического и кинематического) при автоматизированном моделировании механических цепей связана с упрощением математической модели цепи в этих режимах и соответственно с сокращением затрат машинного времени на моделирование.
1.3. Примеры механических цепей различных классов
Рассмотрим ряд конкретных примеров построения механических цепей и их моделей. В примерах будем использовать обозначения компонентов, которые приняты в системе автоматизации моделирования МАРС.
Элементарные механические цепи. Допустим, что все связи компонентов элементарной цепи — элементарные. Процедура построения графа Г (См) механической цепи, соответствующей исследуемой механической системе, включает в себя следующие основные этапы:
выделение составляющих цепь компонентов; выделение узлов общей скорости (топологических узлов), т. е. общих точек связей компонентов; соединение твердых тел, находящихся в относительном движении, при помощи кинема-
28 |
27 |
29 |
|

тических узлов; присоединение к кинематическим узлам динамических компонентов — упругости, трения, люфтов, и т.д.; нумерацию узлов и ветвей.
На основе графа Г (См) строим списковое описание
цепи.
Пример 1.1. На рис. 1.22, а приведено схематическое изображение механической системы, состоящей из двух сцепленных платформ и упругого закрепленного на одной из них груза. При моделировании необходимо учесть эффекты трения качения платформы и трения скольжения груза, а
также упругость крепления груза и упругость сцепки платформ.
На рис. 1.22, б показана соответствующая механическая цепь. Трение качения и трение скольжения вводятся в цепь с помощью односвязного компонента RM, присоединенного к кинематическому Y1-узлу. Этот узел находится между двумя движущимися массами. Сила трения в компоненте RМ пропорциональна относительной скорости движения массивных тел.
В механической цепи использованы следующие обозначения компонентов: 1М1 — масса первой платформы; IM2— масса груза; 1М3 — масса второй платформы; SPR3 , SPR3 —
упругости канатов крепления; SPR3 — упругость сцепки;
RM1 — трение скольжения; RM2, RM3 — трение качения; DMPF — компонент с двумя связями, отражающий трение в сцепке; EF — источник внешнего усилия.
Список С (См) для рис. 1.22, б после нумерации узлов и ветвей (номер дан в скобках) может быть записан следующим образом:
IM, M1, —3,2;
IM, M2, —6,1;
IM, МЗ, —11,5;
YI, —4,4,4,2,1,3;
Y1,—7, 7, 7, 1, 0,
8;
Y1,—12, 12, 12, 5, 0, 6; SPR , К1, —1, 1, 1,2; SPR, K2, —1, 2, 2, 1; DMPF, R1, —9, 9, 1,5; RM, R2, —8, 4;
RM, R3, —13, 6;
EF, F1, —14, 1.
Здесь буквами М, К и R обозначены параметры соответственно массы, упругости и трения; F1 — значение прило-
женной силы.
Рассмотрим соответствующую математическую модель. Уравнения инерционных компонентов:
M [IM1 ] {M1 d 2  dt F3};
dt F3};
M [IM 2 ] |
{M 2 d 1 dt |
F6}; |
M [IM 3 ] |
{M 3 d 5 dt |
F11}. |
Уравнения кинематических узлов:
M [Y11 ] |
{ 1 |
2 |
3 |
0}; |
M [Y12 ] |
{ 1 |
0 |
4 |
0}; |
M [Y13 ] |
{ 5 |
0 |
6 |
0}. |
Уравнения динамических компонентов:
31
30
M [SPR1 ] {dF1 |
dt |
K1( |
1 |
2 )}; |
||
M [SPR2 ] {dF2 |
dt |
K 2( |
2 |
1 )}; |
||
M [RM1 ] {R1 |
3 |
F5 |
0}; |
|
||
M [RM 2 ] {R2 |
4 |
|
F8 |
0}; |
|
|
M [RM 3 ] {R3 |
6 |
|
F13 |
0}; |
|
|
M [DMPF ] {R4 ( |
1 |
5 ) |
F10 |
0}. |
||
Уравнения источников: |
|
|||||
M[EP ] |
|
{F |
EP}; |
|
||
1 |
|
|
14 |
|
|
|
M[EP2 ] |
|
{ |
0 |
0}. |
|
|
Уравнения узловых топологических законов:
F14 |
F1 |
F2 |
F4 |
F7 F6 F9 0; |
F1 |
F2 |
F3 |
F4 |
0; |
F4 |
F5 |
0; |
|
|
F7 |
F8 |
0; |
|
|
F9 |
F10 |
F11 |
F12 |
0; |
F12 |
F13 |
0. |
|
|
Модель цепи характеризуется группой признаков
LDT P.
Для отображения процессов преобразования вращательного движения в поступательное и наоборот будут использоваться преобразователи мощности без потерь (трансформаторы и гираторы). Для отображения нелинейных эффектов используются люфт и трение без смазочного материала.
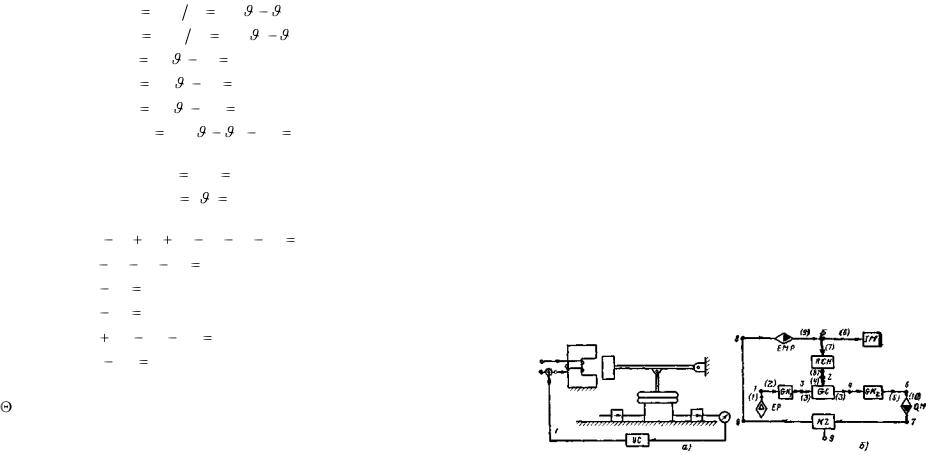
Пример 1.2. Маховик радиуса R и массы m1 связан с помощью безынерционного шатуна АВ с ползуном массы m2 а,
который воздействует на безынерционный поршень со штоком и пружиной. К валу маховика приложен источник момента вращения (Мвр) (рис. 1.23, а). Процедура построения
механической цепи слагается из тех же этапов, что и в предыдущем примере. Рассмотрим основные отличия.
Для преобразования координат поступательного и вращательного движения вводим преобразующий трансформатор с коэффициентом трансформации Т = R (1 — cosa), где R
— радиус маховика; а — угол поворота. Зазор между ползуном и поршнем отображается с помощью компонента LUFT. Механическая цепь, соответствующая рассматриваемому механизму, приведена на рис. 1.23, б. В нее входят следующие компоненты: EF — источник момента вращения; Y1 — кинематический узел для определения относительной скорости на концах вала; КМ — конечная жесткость приводного вала маховика; IM, — момент инерции маховика; IM2 — масса ползуна; SPR — пружина штока.
Список С (См) для нелинейной динамической цепи класса LD PR можно записать в виде
EF,F1, —1,1;
Рис. 1.24
1М, M1 , —3, 2;
IM, M2, —7, 4;
Y1, —2, 2, 2, 1, 2, 3; КМ, K1, — 4, 3; TR, Т, — 5, 6, 2, 4;
SPR, K2, — 9, 9, 5, О;
33
32
LUFT, DZ, Х0, — 8, 8, 4, 5, 6.
Здесь M1, M2 — параметры инерционных компонентов; K1, K2 — параметры упругостей; Т — коэффициент трансформации; F1 — параметр источника; DZ — ширина зазора; Х0 — начальное отклонение от центра зазора.
Уравнение модели цепи:
M [IM1 ] {M1d 2  dt F3};
dt F3};
M [IM 2 ] {M 2 d 4  dt F7 };
dt F7 };
M [Y11 ] |
{ |
1 |
2 |
3 |
0}; |
M [Y11 ] |
{ |
1 |
2 |
3 |
0}; |
F5 |
TF6 |
0}; |
|
|
|
M [KM ] |
{dF4 |
dt |
K1 |
3}; |
||
M [SPR] |
{dF5 |
dt |
K 2( 5 |
|||
M [LUFT ] |
{F8 |
|
0 при ( X 6 |
|||
( 4 |
5 ) |
0 при ( X 6 |
X 0) |
|||
dX6 |
dt |
4 |
5}; |
|
|
|
M[E1 ] |
{F1 |
EF}; |
|
|||
M [E2 ] |
{ 0 |
0}; |
|
|
||
F1 |
F2 |
0; |
|
|
|
|
F2 |
F3 |
F5 |
0; |
|
|
|
F2 |
F4 |
0; |
|
|
|
|
F6 |
F7 |
F8 |
0; |
|
|
|
F8 |
F9 |
0. |
|
|
|
|
0 )};
X 0) DZ , DZ ,
Переменная Х6 соответствует перемещению в зазоре.
Пример 1.3. Рассмотрим особенности механических цепей, в которых имеют место преобразования энергии, например, механической в электрическую или гидравлической в механическую. На рис. 1.24, а приведено схематическое изображение гидронасоса с электромеханическим приводом и системой регулирования объемного расхода на выходе насоса. На рис. 1.24, б приведен граф Г (См) . В состав механической цепи входят компоненты с элементарными и информационными связями, а также согласующие компоненты. Приведем уравнения моделей компонентов. Индексы у переменных в уравнениях моделей соответствуют номерам ветвей и узлов цепи.
Электромеханический привод ЕМР играет роль согласующего компонента. Его первая связь является информационной с управляющей переменной V8, имеющей смысл напряжения или тока в обмотке управления привода, а вторая связь — элементарной с переменными 5 , M9 . Модель ЕМР
имеет вид
5 1 H VN 8 0 ,
H VN 8 0 ,
где Н — постоянная электромеханической связи.
Рычаг RCH — компонент, обладающий двумя элементарными связями. В одной из них действуют переменные
вращательного |
движения |
5 , M 7 , а в другой — поступа- |
|
тельного — |
2 , F8 . Модель рычага описывается уравнениями |
||
T 5 |
2 |
0; M 7 TF8 |
0, |
где Т — коэффициент трансформации рычага. Источник давления ЕР является односвязным компо-
нентом с переменными Р и Q (давление и расход) и моделью Р1 = ЕР, где ЕР — амплитуда источника.
34

Инерционность IM моделирует массу сердечника, яв-
ляется односвязным компонентом с переменными |
5 , M 6 на |
связи; она описывается уравнением J d 5 dt M 6 , |
где J - |
параметр инерционности.
Гидроцилиндр GC — компонент с тремя связями, две из которых гидравлические, а третья — механическая. Гидравлическим связям соответствуют давление Р и расход Q, механической — линейная скорость перемещения штока v и усилие в нем F. Уравнения идеального гидроцилиндра с учетом индексов переменных в его связях имеют вид
P3 |
P4 |
F4 |
S 0; |
Q3 |
S |
2 |
0, |
где S — рабочая площадь поршня.
Гидроклапаны GK1,GK2 на связях гидроцилиндра выде-
лены в отдельные компоненты. Каждый из этих компонентов имеет по две элементарные гидравлические связи с переменными Р и Q. Одна из моделей гидроклапана задается уравнением
P |
P |
K Q |
Q |
0 |
, |
1 |
3 |
G 2 |
2 |
|
|
где KG — эмпирический коэффициент.
Расходомер QM является согласующим компонентом с одной информационной и одной элементарной связями. Элементарная связь соединена с гидроклапаном GK2, а информационная — с управляющей системой. Уравнение расходомера записывается следующим образом:
dVN 7  dt Q10 0 ,
dt Q10 0 ,
35
где VN 7 , — объем жидкости.
Управляющую систему KZ для простоты представим одним колебательным звеном KZ, которое является компонентом с тремя информационными связями, характеризующимися соотношениями вида
K1 dVN 9  dt K 2VN 9 K 3VN 8 K 4VN 7 ; dVN 8
dt K 2VN 9 K 3VN 8 K 4VN 7 ; dVN 8  dt VN 9 .
dt VN 9 .
Узловые топологические законы:
Q1 |
Q2 |
0;Q3 |
Q5 |
0; |
F4 |
F8 |
0; M 9 |
M 6 |
M 7 0; |
Q2 Q3 0;Q5 Q10 0.
Узлы 7 и 8 инцидентны информационным связям.
Пример 1.4. В качестве примера механической цепи с векторными связями рассмотрим плоские механизмы. Звенья плоского механизма могут иметь три степени свободы — две поступательные в плоскости механизма и одну вращательную. Связи твердых тел описываются векторами силы
F |
|
Fx , Fy |
|
T |
и скорости v |
|
x , y |
|
T , моментом Мz и угловой |
|
|
|
|
||||||
скоростью |
z. Так как в плоских механизмах кроме враща- |
||||||||
тельных кинематических пар могут использоваться и поступательные, движение которых приводит к изменению координат внешних точек твердых тел, то в число переменных
связей включаются координаты внешних точек |
|
x , y |
|
T . . |
|
|
Схематическое изображение робота приведено на рис. 1.25, а.
37
36
Манипулятор робота представляет собой плоский механизм, состоящий из шарниров (кинематических узлов вращения) и звеньев (твердых тел). Граф Г (См) робота с векторными связями компонентов приведен на рис. 1.25, б, а граф эквивалентной механической цепи с элементарными связями — на рис. 1.25, в. Каждый из кинематических узлов представляет собой одну степень свободы в относительном движении твердых тел.
Допустим, что необходимо исследовать кинематический режим. В этом случае из рассмотрения исключают потоковые переменные связей — силы и моменты сил. Упрощают модели твердого тела и кинематического узла вращения. С учетом режима можно построить модель цепи (рис. 1.25, в):
M [Y11 ] |
{ 0 |
1 |
2 0}; |
M[TT1 ] { 0 |
5 |
( 1y |
2 y ) 2 0; |
0 |
4 |
( |
1x |
|
2 x ) |
2 |
0; |
|
|
2 |
|
3 |
0}; |
|
|
|
|
|
|
|
|
||
M [KY ] |
{ |
3 |
|
8 |
6 |
0; |
|
10 |
5 cosV7 |
|
4 sinV7 |
0; |
|||
9 |
5 sinV7 |
|
|
4 cosV7 |
0}; |
||
M[TT2 ] { 10 |
|
13 |
|
( 1y |
|
2 y ) 8 0; |
|
9 |
12 |
( |
1x |
|
2 x ) |
8 |
0; |
|
|
8 |
11 |
0}; |
|
|
|
|
|
|
|
|
|||
В уравнениях КУ переменная V7 соответствует углу поворота TT2 относительно TT1
Приводы представлены кинематическими источниками скорости
M[EV1 ] |
{ |
1 |
EV1 (t)}; |
M [EV2 ] |
{ |
6 |
EV2 (t)}, |
где EV (t) — заданная функция от t.
К уравнениям модели цепи необходимо добавить источник нулевой скорости EV:
M [EV ] { 0 0}.
38