

книги / Микропроцессорные средства автоматизации энергетических систем. Сети автоматизации
.pdfДостоинством схемы с операционным усилителем является возможность калибровки передатчика без подключенного к нему кабеля и приемника, поскольку вносимая ими погрешность пренебрежимо мала.
Напряжение источника Eп выбирается таким, чтобы обеспечить работу транзистора передатчика в активном (ненасыщенном) режиме и скомпенсировать падение напряжения на проводах кабеля и сопро-
тивлениях R0, Rп. Для этого выбирают E > I (R0 + Rкаб + Rн) + Vнас, где Vнас – напряжение насыщения транзистора (1–2 В). Например, при
типовых значениях R0 = Rп = 500 Ом и сопротивлении кабеля 100 Ом (при длине 1 км) получим напряжение источника питания, петли 22 В; ближайшее стандартное значение равно 24 В. Отметим, что мощность, связанная с избыточным напряжением источника питания, по сравнению с рассчитанным значением, будет рассеиваться на транзисторе, что особенно существенно для интегральных передатчиков, не имеющих теплоотвода.
В схемах на рис. 1.18 используется гальваническая развязка между входом передатчика и передающим каскадом. Она необходима для исключения паразитных связей между передатчиком и приемником.
Поверх аналоговой токовой петли можно передавать цифровую информацию. Такой способ передачи данных описан в HARTпротоколе.
Цифровая токовая петля используется обычно в версии 0–20 мА, поскольку она реализуется гораздо проще, чем 4–20 мА (рис. 1.19). Поскольку при цифровой передаче данных точность передачи логических уровней роли не играет, можно использовать источник тока с не очень большим внутренним сопротивлением и низкой точностью. Так, на рис. 1.19 при стандартном значении напряжения питания Eп = 24 В и падении напряжения на входе приемника 0,8 В для получения тока 20 мА сопротивление R0 должно быть равно примерно 1,2 кОм. Сопротивление кабеля с сечением 0,35 мм2 и длиной 1 км равно 97 Ом, что составляет всего 10 % от общего сопротивления петли, и им можно пренебречь. Падение на-
91
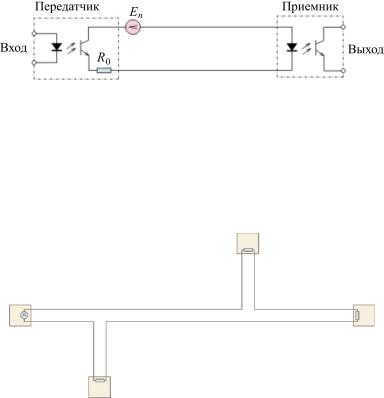
пряжения на диоде оптрона составляет 3,3 % от напряжения источника питания, его влиянием на ток в петле также можно пренебречь. Таким образом, с достаточной для практики точностью можно считать, что передатчик в этой схеме является источником тока.
Рис. 1.19. Принцип реализации цифровой токовой петли
Как аналоговая, так и цифровая токовая петля может использоваться для передачи информации нескольким приемникам одновременно (рис. 1.20). В результате низкой скорости передачи информации по токовой петле согласование длинной линии с передатчиком и приемником не требуется.
Рис. 1.20. Принцип реализации токовой петли для передачи информации нескольким приемникам
Цифровая токовая петля 20 мА используется в стандарте ИРПС (ОСТ 11 305.916–84). Этот стандарт широко применялся в компьютерах, выпущенных в СССР и странах СЭВ до 1990-х годов. Основное преимущество токовой петли заключается в том, что
92
точность не зависит от длины и сопротивления линии передачи, поскольку управляемый источник тока будет автоматически поддерживать требуемый ток в линии. Вдобавок такая схема позволяет осуществлять питание датчиков непосредственно от линии передачи. Дальность передачи по ИРПС – до 1,5 км.
1.7.4. Стандарты физического уровня
ISO 11898 и ISO 11519-2 в протоколе СAN
Внутри ISO стандартизация САN в рамках эталонной модели OSI выполняется в комитете ISO/TC22/SC3/WG1. Технический комитет 22 разрабатывает стандарты для транспортных средств (Road Vehicles). Подкомитет 3 проводит работы с электрическим и электронным оборудованием (Electrical аnd Electronic Equipment), а рабочая группа
1, именуемая «Последовательная передача данных» (Serial Data Communication), отвечает за все работы, связанные с САN-шиной. Группой рекомендованыдвастандарта:
♦ISO 11898 «Road Vehicles – Interchange of Digital Information – Controller Area Network (CAN) for High-Speed Communication» («Транспортные средства. Обмен цифровой информацией. Локальная сеть контроллеров CAN для быстрой связи»);
♦ISO 11519-2 «Road Vehicles – Low-Speed Serial Data Communication – Part 2. Low-speed Controller Area Network (CAN)» («Транспортные средства. Низкоскоростная последовательная связь данных. Часть2. НизкоскоростнаялокальнаясетьконтроллеровCAN»).
Оба стандарта, как и спецификация Bosch, определяет САN для физического и канального уровней модели ISO/OSI. Различия
между двумя стандартами – ISO 11898 и ISO 11519-2 – показаны на рис. 1.21, а, б и в табл. 1.15.
Устройства в CAN-системе обычно соединяются по шине, состоящей из трех проводов (двух сигнальных и одного общего) (рис. 1.22). Стандарт CAN был специально разработан для устойчивой работы в насыщенной помехами окружающей среде с применением разносторонне сбалансированной линии, такой как и для RS-485. Отличие
93
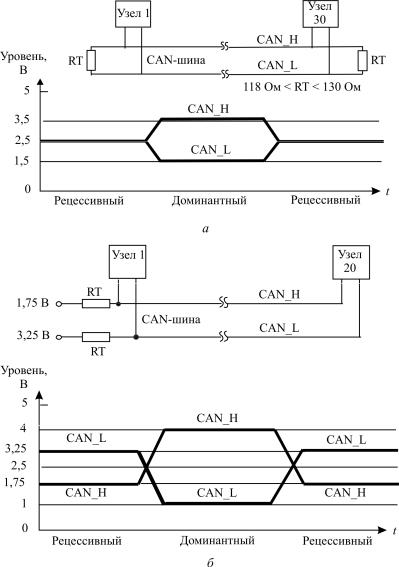
Рис. 1.21. Схемы включения и битовые уровни:
а – по ISO 11898; б – по ISO 11519-2
94
Таблица 1 . 1 5
Характеристики физических интерфейсов ISO 11898 и ISO 11519-2
Параметр |
ISO 11898 |
ISO 11519-2 |
|
Максимальнаяскорость |
1 Мбит/спри40 м |
125 кбит/с |
|
передачи |
|||
|
|
||
Числоузловсети |
30 |
20 |
|
Характеристикакабеля |
Волновоесопротивление |
Емкостьнеболее30 пФ |
|
120 (108–132) Ом |
дляCAN_H иCAN_L |
||
|
|||
|
|
CAN_H: 2,2 К(5 %) |
|
Терминатор |
2 резисторанаконцах |
кцепи+1,75 В |
|
линии120 (118–130) Ом |
CAN_L: 2,2 К(5 %) |
||
|
|||
|
|
кцепи+3,25 В |
|
Допустимоенапряжение |
|
|
|
влинии: |
|
|
|
– приUпит +12 В |
–3… +16 В |
–16…+16 В |
|
– приUпит +24 В |
–3… +32 В |
–32…+32 В |
|
Рецессивныйуровень |
VCAN_H – VCAN_L = 0 В |
CAN_H: 1,75 (1,6–1,9) В |
|
–0,5… +0,05 В |
CAN_L: 3,25 (3,1–3,4) В |
||
|
|||
Доминантныйуровень |
VCAN_H – VCAN_L = 2 B |
САN_Н: 4,0 (3,85–5,0) В |
|
1,5–3 B |
CAN_L: 1,0 (0–1,15) В |
||
|
|||
Токпередатчика |
25–30 мАна60 Ом |
–1 мАна2,2 кОм |
|
Характеристикиприемника: |
|
|
|
– вход. чувствительность |
400 мB |
600 мВ |
|
– напряжениепереключения |
0,5–0,9 B |
– 0,3…+0,3 B |
|
– вход. сопротивление |
10–100 кOм |
360 кОм |
|
– синфазныйсигнал |
–2…+7 B |
–1…+6 В |
|
– диапазонвход. сигнала |
соответствуетуровням |
соответствуетуровням |
|
|
CAN_H, CAN_L |
(CAN_H + СAN_L) / 2 |
СAN от RS-485 на физическом уровне заключается в том, что все потенциалы сигналов линии связи положительные по отношению к общему проводу. Это обусловлено тем, что в транспортных системах минусовый зажим питающей сети от аккумулятора соединен с «массой» (общим проводом).
Стандарт CAN жестко не определяет среду передачи, он может быть каким угодно (например, радиоканалом или оптоволокном). Однако на практике под CAN-сетью обычно подразумевается
95
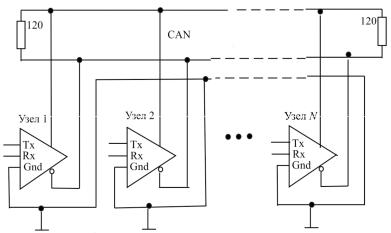
сеть топологии «шина» с физическим уровнем, определенным в стандарте ISO 11898, в виде дифференциальной пары и представляет собой чаще всего витую пару (экранированную или неэкранированную) и общий провод (см. рис. 1.22). Плоская пара (телефонный тип кабеля) также работает хорошо, но более чувствительна к внешним источникам шума.
Рис. 1.22. Соединение устройств по САN-шине
Как правило, провода CAN-шины оранжевого цвета, иногда они отличаются различными цветными полосами (CAN-High – черная, CAN-Low – оранжево-коричневая).
Высокий уровень помех обусловил выбор низкоомной линии обмена данными. В шинных формирователях CAN-интерфейса один из логических уровней представлен высоким напряжением и малым током линии, а также высоким сопротивлением выходного каскада (рецессивный, отступающий, удаляющийся уровень). Другому уровню соответствуют низкое напряжение и высокий ток линии, низкое сопротивление выходного каскада (доминантный, преобладающий уровень). В такой схеме принципиально невозможно возникновение опасных сквозных токов при одновременной работе нескольких пе-
96
редатчиков. Упрощенно можно сказать, что в этом случае выходные каскады выполнены по схеме с открытым коллектором.
Дифференциальное включение приемопередатчиков обеспечиваетподавлениесинфазнойпомехи, приэтомуровеньсигналовсоставляет 1/3 от значения напряжения питания, причем само напряжение питания жестконеопределяется. Например, типичныезначенияпринапряжении питания +5 В приведены на рис. 1.21, причем доминирующим уровнем являетсянижнийуровень, арецессивным, соответственно, верхний.
Для обеспечения безотказной работы в тяжелых условиях по стандарту ISO 11898 CAN-контроллер обеспечивает работу в сети в следующих случаях:
♦любой из трех проводов в шине оборван;
♦любой провод закорочен на питание;
♦любой провод закорочен на общий провод.
При обрыве двух проводов часть функций основной системы может быть реализована в каждой из подсистем, созданных обрывом.
Как правило, по линиям ввода-вывода применяется гальваническая развязка, которая может устанавливаться либо между приемопередающим буфером и микросхемой, обеспечивающей функции CAN, либо между микросхемой и остальной системой (рис. 1.23).
Отметим, что большинство фирм придерживаются стандарта
ISO 11898-2 (CAN High-Speed). Однако вместо стандарта ISO 11519-2
начинает более широко применяться стандарт ISO 11898-3 (CAN Low-Sрeed), например немецкими фирмами. Значения напряжения
вэтом случае следующие:
–рецессивный: CAN_H = 0, CAN_L = 5 В;
–доминантный: CAN_H = 3,6 В, CAN_L = 1,4 В.
Кроме того, максимальное расстояние между узлами – до 1 км. Если требуется большая длина, то ставятся мосты или повторители.
Узел, передающий сообщение, – передатчик этого сообщения. Узелявляетсяпередатчикомдотехпор, пока оннепотерял арбитраж.
Узел является приемником сообщения, если он не передатчик сообщения и шина занята.
97
Точка времени, в которой сообщение является корректным, различна для передатчиков и приемников сообщений.
Сообщение пригодно для передатчика, если нет ошибок до конца кадра. Если сообщение разрушено, ретрансляция будет происходить автоматически и согласно приоритетам. Чтобы решить приоритеты доступа к шине с другими сообщениями, ретрансляция должна начаться, кактолькошинаосвободится.
Сообщение корректно для приемника, если нет ошибок до конца кадра.
Общего стандарта на САN-разъемы тоже не существует. Обычно это определяется HLP-протоколом (протоколом прикладного уровня). Ниже приведены самые распространенные соединительные разъемы:
♦9-pin D-Sub, продвигается CiA (рис. 1.23, а);
♦5-pin Mini-C и/или Micro-C, используется DeviceNet и SDS;
♦6-pin Deutch, продвигается CANHUG для мобильной гид-
равлики;
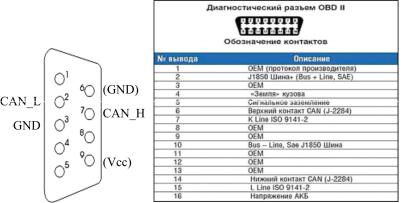
♦ 16-pin OBD II, диагностический разъем для автомобилей (распиновка различна для групп производителей) (рис. 1.23, б).
а |
б |
Рис. 1.23. Разъемы 9-pin D-Sub (а) и OBD II (б)
98
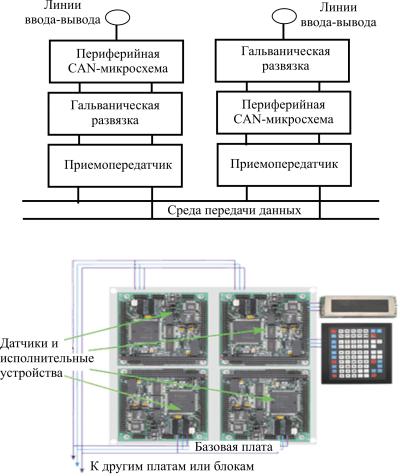
Нарис. 1.24 представленысоединенияустройств поCAN-шине.
а
б
Рис. 1.24. Гальваническая развязка по CAN-шине (а); соединение устройств по CAN-шине (б)
99
1.7.5. Стандарт IEC 1158-2 в протоколах
Foundation и Profibus PA
Международные стандарты ISA/ANSI S50.02 и IEC DIS 61158
являются аналогами друг друга, разработаны ведущими специалистами в области коммуникаций более чем из 17 стран, утверждены в 1993 году стандартами МЭК и ISА во взрывоопасных производствах. В настоящее время эти стандарты называются
IEC 1158-2.
Физический уровень получает сообщения с коммуникационного уровня и преобразует их в физические сигналы в среде передачи и наоборот. Скорость передачи постоянна и равна 31,25 кбит/с.
Технология передачи в соответствии с IEC 1158-2 отвечает требованиям химической и нефтеперерабатывающей промышленности и других взрывоопасных производств, используется в протоколах Foundation и Profibus PA. Этой технологией является битсинхронизированный протокол, упоминаемый как H1. Передача основывается на следующих принципах:
♦каждый сегмент имеет только один источник питания;
♦каждое устройство имеет постоянное значение потребляемого тока;
♦полевые устройства рассматриваются как пассивные потребители тока;
♦оба конца линии затерминированы;
♦допускаются топологии «линия», «дерево», «звезда»;
♦для повышения надежности допускаются избыточные сегменты шины.
Характеристика технологии СА по стандарту IEC 1158-2 приведена в табл. 1.16.
Для модуляции предполагается, что базовый уровень потребления, требуемый каждым устройством, составляет менее 10 мА. Выходные сигналы генерируются передатчиком в диапазоне –9…+9 мА от базового токового потребления (рис. 1.25).
100