

8504
.pdfи применяя к нему необходимое условие устойчивости, получаем следующую систему неравенств:
40.879 + 1.397 1 + 6.046 2 < 0, |
451.235 + 0.642 1 < 0, |
1 > 0. |
Очевидно, что последние два неравенства несовместны, поэтому задача синтеза стабилизирующего регулятора вида (2.20) не имеет решения. Следовательно, управление необходимо искать в более широком классе, чем класс линейных обратных связей по выходу. Например, использовать наблюдатель, позволяющий восстановить компоненты вектора состояния по измеряемому выходу, после чего искать управление в виде линейной обратной связи, но уже по восстановленному состоянию
(см. рис. 2.7).
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
= Θ |
̇ = + |
|
|
|
||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||
= + + −
Рис. 2.7. Структурная схема системы с наблюдателем.
Прежде чем приступать к реализации описанного подхода, напом-
ним, что наблюдателем (или наблюдателем полного порядка) для объек-
та (2.7), (2.19) называется система вида
|
= + + − , |
(0) = 0, |
|
где — состояние наблюдателя, размерность которого совпадает с размерностью состояния системы (2.7), а матрица — матрица коэффициентов усиления наблюдателя. Известно [Kwakernaak1977, Andreev1976], что ошибка восстановления = − стремится к нулю независимо от ее начального состояния тогда и только тогда, когда матрица − асимптотически устойчива. В этом случае говорят, что наблюдатель является асимптотически устойчивым. Собственные числа матрицы − называются полюсами наблюдателя. Таким образом, синтез наблюдателя состоит в определении такой матрицы коэффициентов усиления , при которой полюса наблюдателя будут расположены в левой полуплоскости комплексной плоскости. Данная задача разрешима, если пара мат-
41
риц , является детектируемой [Kwakernaak1977].
Проверим детектируемость системы (2.7), (2.19). Для этого вычис-
лим ранг матрицы наблюдаемости: |
|
|
|
|
|||||||
rank O , |
= |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
||
= |
rank |
1 |
= 4. |
||||||||
|
0 |
1 |
0 |
0 |
0.776 |
45.767 |
−8.642 |
−58.426 |
|||
|
|
|
0 |
0 |
1 |
0 |
−10.640 |
−46.044 |
113.599 |
|
|
|
|
|
512.747 |
|
|||||||
|
|
|
0 |
0 |
1 |
−0.008 |
−0.496 |
0.870 |
|
|
|
|
|
0 |
46.400 |
|
|||||||
Следовательно, система является наблюдаемой, поэтому задача синтеза наблюдателя разрешима. Далее, согласно теореме о разделении, задачи синтеза модального регулятора (определения матрицы Θ) и наблюдателя (вычисления матрицы ) могут решаться независимо [Andreev1976]. Поскольку матрица Θ уже была найдена ранее, то осталось найти матрицу .
Предположим, что требуется передвинуть собственные числа 3 и4 матрицы , например, в точки −2 ± 0.5 . Сведем задачу построе-
ния матрицы |
к задаче синтеза модального регулятора, разобранной |
|||||||||||||||||||||||
в предыдущих параграфах. Для этого воспользуемся принципом двой- |
||||||||||||||||||||||||
|
|
|
|
|
|
, |
детектируема тогда и только тогда, когда пара |
|||||||||||||||||
ственности: пара |
|
|
||||||||||||||||||||||
, |
|
стабилизируема. Следовательно матрица |
|
может быть найде- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
: |
|
|
|
|||||||
на как матрица стабилизирующего регулятора для пары |
|
|
|
|
|
|||||||||||||||||||
|
Построим |
|
|
|
− |
|
= |
− . |
|
|
к блочному |
|||||||||||||
|
|
|
|
|
преобразование |
|
, приводящее матрицу |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
этого правые собственные векторы |
|
|
|||||||||||||
нижнетреугольному виду. Для |
|
|
|
|
|
|
|
|
|
|
|
|
|
,3 = |
||||||||||
|
|
|
|
и |
4 ≈ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1, 0, 0, 0 |
− 0.001, −0.155, −0.007, −0.988 |
матрицы |
|
со- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ответствующие собственным числам |
и |
|
, дополним произвольными |
|||||||||||||||||||||
и |
|
|
|
|
. Таким образом, матрица |
|
|
|
2 = 0, 1, 0, 0 |
|||||||||||||||
векторами до линейно независимой |
системы, например, |
|
|
|
|
|
|
|||||||||||||||||
3 |
|
4 |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
3 |
= 0, 0, 1, 0 |
|
|
|
|
|
|
|
|
|
|
преобразования имеет вид |
|||||||||||
|
|
|
|
|
4 |
−0.001 |
−0.155 |
−0.007 |
−0.988 |
|
|
|
|
|
||||||||||
|
|
|
|
−1 = 1 |
= |
|
1 |
|
|
0 |
|
|
0 |
|
|
0 . |
|
|
|
|
||||
|
|
|
|
|
|
2 |
|
|
0 |
|
|
1 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||||
|
|
|
|
|
3 |
|
|
0 |
|
|
0 |
|
|
1 |
|
|
0 |
|
|
|
|
|
||
42
Применяя построенное преобразование к матрицам , и получаем:
−1 − = −1 − −1 , |
= . |
(2.21) |
Поскольку в матрице больше одного столбца, то задача построения матрицы имеет не единственное решение. Будем искать , например, в виде:
|
|
|
|
1 |
2 |
0 |
0 |
, |
|
|
|
|
|
|
|
|
|
= 1 |
2 |
0 |
0 |
|
|
|
|
||
тогда: |
|
6.376 + 0.156 1 |
|
0.156 2 |
0 |
0 |
|
||||||
|
−1 |
|
|
||||||||||
|
|
− 1 |
1 |
|
|
− 2 |
0 |
0 |
|
||||
− |
|
= |
|
|
|
|
|
2 |
−7.178 |
0.471 |
. |
||
|
|
|
−46.328 − |
−0.048 − |
|
||||||||
Получившаяся матрица |
является блочной нижнетреугольной, поэтому |
||||||||||||
46.608 |
|
|
1.048 |
7.222 |
−10.334 |
|
|||||||
|
|
|
|
|
|
1 |
|
2 |
|
|
|
||
исходная задача свелась к отысканию |
и |
при которых собственные |
|||||||||||
числа блока |
|
|
|
|
|
|
|
|
|
||||
6.376 + 0.156 1 0.156 2 − 1 − 2
совпадают с −2±0.5 . Запишем характеристический многочлен матрицы и воспользуемся теоремой Виета, тогда:
6.376 + 0.156 1 − 2 = −4, |
−6.376 2 = 4.25. |
Решая данную систему, находим матрицу усиления наблюдателя
−70.795 −0.667 0 0= −70.795 −0.667 0 0 .
Возвратимся к исходным переменным:
= |
|
= |
−0.594 |
−0.594 |
(2.22) |
|
−1 |
10.969 |
10.969 . |
|
|||
|
|
|
|
0.466 |
|
|
|
|
|
|
0.466 |
|
|
|
|
|
|
69.939 |
69.939 |
|
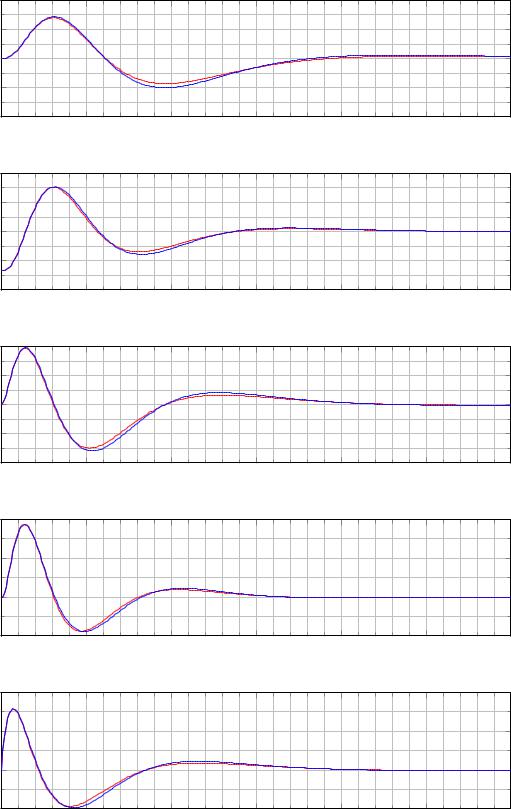
На рисунке 2.8 приведены графики переходных процессов и управления в линейной (2.7) и нелинейной (2.4) системах, замкнутых регулятором (2.12) и наблюдателем (2.22). Как и предсказывает теория, в линейном случае построенный наблюдатель позволяет восстановить состояние системы и стабилизировать. Однако в нелинейном случае
43
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|
|
|
|
0.0 |
|
|
|
|
|
|
|
|
|
||
|
−0.1 |
|
|
|
|
|
|
|
|
|
||
|
−0.2 |
0.5 |
1.0 |
|
1.5 |
2.0 |
2.5 |
|||||
|
0.30 |
|
|
|||||||||
|
0.15 |
|
|
|
|
|
|
|
|
|
||
0.00 |
|
|
|
|
|
|
|
|
|
|||
−0.15 |
|
|
|
|
|
|
|
|
|
|||
−0.30 |
0.5 |
1.0 |
|
1.5 |
2.0 |
2.5 |
||||||
|
|
0.8 |
|
|
||||||||
̇ |
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
0.0 |
|
|
|
|
|
|
|
|
|
||
|
−0.4 |
|
|
|
|
|
|
|
|
|
||
|
−0.8 |
0.5 |
1.0 |
|
1.5 |
2.0 |
2.5 |
|||||
|
|
2.6 |
|
|
||||||||
̇ |
|
1.3 |
|
|
|
|
|
|
|
|
|
|
|
0.0 |
|
|
|
|
|
|
|
|
|
||
|
−1.3 |
0.5 |
1.0 |
|
1.5 |
2.0 |
2.5 |
|||||
|
|
|
12 |
|
|
|||||||
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
−6 |
|
|
|
|
|
|
|
|
||
|
|
|
|
зависимости от времени положения тележки |
, её скоро- |
|||||||
Рис. 2.8. Графики |
0.5 |
1.0 |
|
1.5 |
2.0 |
2.5 |
|
|||||
сти |
|
, угла отклонения маятника |
|
, угловой скорости маятника |
|
и управле- |
||||||
ния |
̇ для линейной (красный цвет) и нелинейной (синий цвет) систем, за- |
|||||||||||
мкнутых регулятором (2.12) и наблюдателем (2.22); начальные условия̇ |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
0 |
= |
|
0.0, −0.2, 0.0, 0.0 . |
|
|
44 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Наконец, рассмотрим случай, когда измеряемый выход содержит только угол отклонения маятника, то есть
В разделе 2.2.2 было |
|
= , |
|
= |
0, 1, 0, 0 . |
|
|
|
|
|
|
|
|
|
|
(2.23) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
показано, что пара матриц |
|
|
|
не является детек- |
||||||||||||||||||||
тируемой. Покажем теперь, что |
ненаблюдаемое подпространство соот- |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
( , ) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
ветствует переменной . Для этого построим матрицу замены |
|
|
|
|
, приво- |
|||||||||||||||||||||||||
дящую систему к |
каноническому виду Калмана. Сначала найдем базис |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
Ker O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
подпространства Im C |
|
|
|
|
|
|
. Так как рассматриваемая си- |
|||||||||||||||||||||||
стема является |
полностью управляемой, то справедливо равенство Im |
C |
||||||||||||||||||||||||||||
|
, |
, |
∩ |
|
|
|
, |
|
|
, |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
4, поэтому Im C |
∩ |
Ker O |
, |
= |
Ker O |
. Чтобы найти под- , = |
|||||||||||||||||||||||
пространство Ker O |
|
, |
решим следующую систему: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
O , |
1 |
= |
|
0 |
|
|
|
1 |
|
|
|
0 |
|
|
|
0 1 0 |
|
|
|
|||||||||
|
|
2 |
|
0 |
|
|
|
0 |
|
|
|
0 |
|
|
|
1 2 |
= |
0 . |
|
|
||||||||||
|
|
|
3 |
|
|
|
|
|
45.767 |
−46.044 |
|
|
|
3 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
0 |
|
−0.496 |
|
0 |
|
|
|
|||||||||||||||
Откуда |
|
4 |
|
|
|
0 −58.426 |
|
512.747 |
46.400 4 |
|
0 |
|
|
|
||||||||||||||||
|
|
получаем, что искомое подпространство представляет собой ли- |
||||||||||||||||||||||||||||
це замены . |
|
|
|
|
|
|
|
1, 0, 0, 0 |
|
и совпадает с блоком |
2 |
в матри- |
||||||||||||||||||
нейную оболочку вектора |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
Следующим шагом найдем блок |
|
|
, образующий с блоком |
|
|
|
базис в |
||||||||||||||||||||||
стве блока 1 можно |
|
|
, |
|
|
|
|
равенства Im |
|
, |
= |
, в каче- |
||||||||||||||||||
подпространстве Im C |
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
. В силу 1 |
|
|
|
|
|
|
|
|
2 |
|
|
||||||||||||||||
взять следующую матрицу:
0 0 0
1 0 01 = 0 1 0 .
0 0 1
Очевидно, что оставшиеся блоки 3 и 4 отсутствуют, поэтому итоговая матрица преобразования, приводящего систему к каноническому разложению Калмана, имеет вид:
= |
1, 2, 3, 4 |
= |
0 0 |
0 |
1 |
|
1 |
0 |
0 |
0 . |
|||
|
|
|
|
1 |
0 |
|
|
|
|
0 |
0 |
||
|
|
|
0 |
0 |
1 |
0 |
45
Матрицы системы (2.7) после замены принимают следующий вид:
= |
|
0 |
0 |
1 |
0 |
, |
= |
|
0 |
, |
= 1 0 0 0 . |
0.776 |
−10.640 |
−0.008 |
0 |
1.397 |
|||||||
|
|
|
−46.044 |
−0.496 |
|
|
|
|
|
|
|
|
45.767 |
0 |
|
|
6.046 |
|
|
||||
|
|
0 |
1 |
0 |
0 |
|
|
|
0 |
|
|
Таким образом, ненаблюдаемое подпространство представляет собой линейную оболочку вектора 0, 0, 0, 1 и, если вернуться к исходным переменным, то
|
0 |
= |
0 0 0 |
1 0 |
= |
1 |
||
0 |
1 |
0 |
0 |
0 0 |
0 . |
|||
|
|
|
|
1 |
0 |
|
|
|
|
0 |
|
0 |
0 0 |
|
0 |
||
|
1 |
|
0 |
0 |
1 |
0 1 |
|
0 |
Полученный вектор как раз и соответствует переменной , что доказывает ее ненаблюдаемость. Окончательно заключаем, что синтезировать асимптотически устойчивый наблюдатель по выходу (2.23) для системы (2.7) невозможно, поскольку собственное число = 0 нельзя передвинуть в левую полуплоскость комплексной плоскости. В качестве примера рассмотрим, что получится, если синтезировать всего лишь устойчивый наблюдатель и использовать его для решения задачи стабилизации.
Построим матрицу усиления наблюдателя так, чтобы сдвинуть собственное число 4 в точку −2. Для этого, как и ранее, построим преобразование , приводящее матрицу к блочному нижнетреугольному виду. Нетрудно видеть, что в рассматриваемом случае матрица совпадает с найденной ранее, поэтому, применяя преобразование к матрицам , и получаем:
|
|
|
−1 |
|
|
|
|
|
|
−1 |
|
−1 |
|
|
, |
|
|
(2.24) |
||||
|
|
|
|
− |
|
= |
, |
− |
|
|
|
= . |
|
|||||||||
Теперь положим |
= , 0, 0, 0 |
тогда: |
|
|
|
0 |
0 |
0 |
|
|||||||||||||
|
−1 |
|
|
|
−1 |
|
|
|
6.376 + 0.156 |
|
|
|||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
0 |
0 |
|
||||||
|
− |
|
|
= |
−46.328 − |
|
|
−0.048 |
−7.178 |
0.471 |
. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Параметр |
|
найдем из |
|
46.608 |
|
|
|
1.048 |
7.222 |
−10.334 |
||||||||||||
|
|
|
|
|
|
|
|
|
решения уравнения |
6.376 + 0.156 . |
= −2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
, следо- |
|||||||||
вательно, матрица наблюдателя |
= |
− 53.692, 0, 0, 0 |
Возвращаясь |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
46
к прежним переменным, получаем |
|
|
= −1 |
= 0.055, 8.319, 0.353, 53.042 . |
(2.25) |
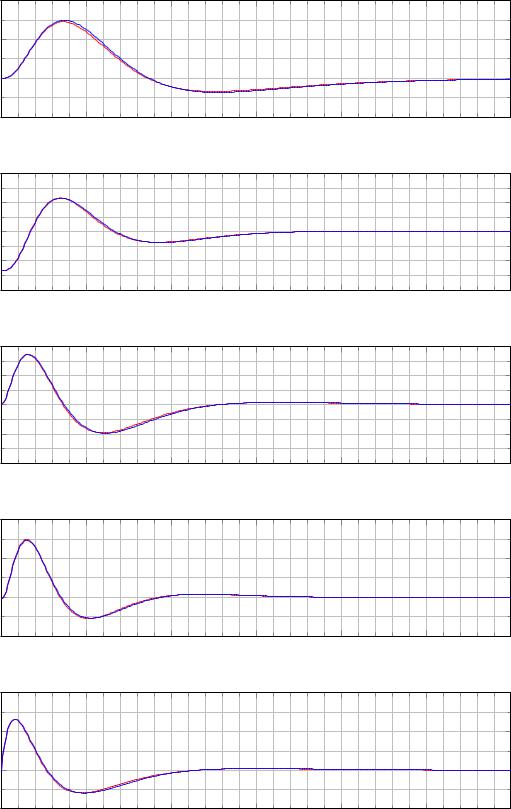
На рисунках 2.9 приведены графики переходных процессов в линейной (2.7) и нелинейной (2.4) системах, замкнутых регулятором (2.12) и наблюдателем (2.25). В качестве начальных условий была выбрана точка
0 = 0, −0.2, 0, 0 .
2.3. Дискретные системы управления 2.3.1. Дискретизация и восстановление сигналов
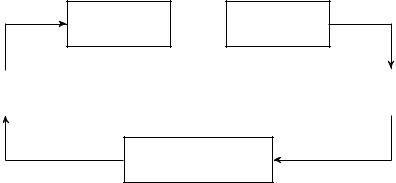
В предыдущих разделах при синтезе управления мы считали, что состояние объекта или его измеряемый выход изменяются непрерывно во времени и могут принимать любые конечные значения. Однако современные системы управления, как правило, реализуются с помощью компьютера, который способен хранить и обрабатывать только дискретную информацию. Таким образом, возникает необходимость преобразования непрерывных сигналов, поступающих с датчиков на вход компьютера, в дискретные (цифровые). Соответствующее устройство называется аналого-цифровым преобразователем (АЦП, analog-to-digital converter, A/D). Дискретные (цифровые) сигналы, получающиеся на выходе компьютера, в свою очередь, необходимо преобразовать обратно в непрерывные, чтобы использовать их в дальнейшем для управления объектом. За такое преобразование отвечает цифро-аналоговый преоб-
разователь (ЦАП, digital-to-analog converter, D/A). Схема соответствую-
щей системы управления изображена на рис. 2.10. Компьютер в этой системе выполняет функцию регулятора.
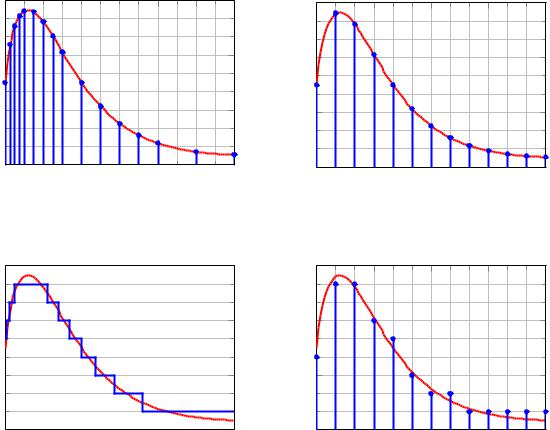
Преобразование непрерывного сигнала в дискретный называется квантованием или дискретизацией. Квантование возможно по времени, амплитуде, а также по времени и амплитуде одновременно. В случае квантования по времени непрерывный сигнал ( ) заменяется последовательностью значений ( ), взятых в произвольные дискретные моменты времени , + (рис. 2.11а). Получающийся таким образом дискретный сигнал называется импульсным. Очевидно, что такое преобразование приводит к потере информации о поведении исходного сигнала в промежутках между выбранными моментами. Для уменьшения ошибки квантования следует выбирать моменты дискретизации в за-
47
|
0.2 |
|
|
|
|
|
|
0.1 |
|
|
|
|
|
0.0 |
|
|
|
|
|
|
|
−0.1 |
0.5 |
1.0 |
1.5 |
2.0 |
|
|
0.30 |
2.5 |
||||
|
0.15 |
|
|
|
|
|
0.00 |
|
|
|
|
|
|
−0.15 |
|
|
|
|
|
|
−0.30 |
0.5 |
1.0 |
1.5 |
2.0 |
||
|
0.8 |
2.5 |
||||
̇ |
0.4 |
|
|
|
|
|
0.0 |
|
|
|
|
|
|
|
−0.4 |
|
|
|
|
|
|
−0.8 |
0.5 |
1.0 |
1.5 |
2.0 |
|
|
2.6 |
2.5 |
||||
̇ |
1.3 |
|
|
|
|
|
0.0 |
|
|
|
|
|
|
|
−1.3 |
0.5 |
1.0 |
1.5 |
2.0 |
|
|
12 |
2.5 |
||||
|
6 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
−6 |
|
|
|
|
|
|
|
переходных процессов в линейной (2.7) и нелинейной (2.4) |
||||
Рис. 2.9. Графики |
0.5 |
1.0 |
1.5 |
2.0 |
2.5 |
|
системах, замкнутыхрегулятором (2.12) и наблюдателем (2.25). |
|
|||||
48
Объект  Датчик
Датчик
ЦАП |
|
АЦП |
|
|
|
Регулятор
Рис. 2.10. Схема цифровой системы управления.
висимости от свойств исходного непрерывного сигнала. Однако, ввиду сложности реализации, данный способ не нашел широкого применения. На практике получил распространение подход при котором отсчеты располагаются через равные промежутки времени, то есть +1 −= = const (рис. 2.11б). Величина называется периодом дискрети-
зации или интервалом дискретизации, чем он меньше, тем лучше дис-
кретный сигнал приближает непрерывный. В то же время с уменьшением интервала дискретизации увеличивается объем дискретных данных и, как следствие, повышается сложность их обработки, хранения и передачи. Таким образом, при определении интервала дискретизации приходится искать компромиссное решение.
При квантовании по амплитуде (или, как еще говорят, по уровню) вся область значений непрерывного сигнала разбивается на отдельные дискретные уровни 0, … , , количество которых зависит от числа разрядов в разрядной сетке компьютера. Получающийся после преобразования сигнал может принимать только те значения, которые совпадают с выбранными уровнями, расстояние между которыми, то есть величина = +1 − , называется шагом квантования. При квантовании используется либо операция усечения, либо округления. Если осуществляется усечение, то значение непрерывного сигнала, находящегося между соседними уровнями и +1, заменяется нижним значением , а при округлении — ближайшим значением. Заметим, что квантование сигнала по уровню — принципиально нелинейная операция. На рис. 2.11в показано квантование по амплитуде с использованием операции округления в случае постоянного шага квантования.
Случай совместного квантования и по амплитуде, и по времени при постоянном периоде дискретизации и шаге квантования показан на рис. 2.11г,
49
( ) |
|
|
|
|
0 |
(а) |
|
+1 |
|
( ) |
|
|
|
|
0 |
(в) |
|
( ) |
|
|
|
|
0 |
3 |
(б) |
9 |
|
6 |
|
|||
( ) |
|
|
|
|
0 |
3 |
(г) |
9 |
|
6 |
|
Рис. 2.11. Квантование непрерывного сигнала: (а) по времени в произвольные дискретные моменты ; (б) по времени с интервалом дискретизации ; (в) по амплитуде (уровню); (г) одновременно по времени и амплитуде.
получающийся при этом сигнал называется цифровым. Преобразование дискретного сигнала ( , ) + в непрерыв-
ный ( ) основано на аппроксимации функции ( ) некоторым полиномом, значения которого совпадают с в моменты времени , +. На практике чаще всего используются интерполяционные полиномы нулевого порядка. В этом случае значение непрерывного сигнала между моментами отсчёта сохраняется постоянным:
( ) = , |
< +1. |
(2.26) |
Устройство, восстанавливающее сигнал с помощью полинома нулево-
го порядка, называется эктраполятором нулевого порядка (Zero-Order Hold, ZOH).
Помимо полиномов нулевого порядка для восстановления непрерыв-
50