

МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ «МЭИ»
Кафедра управления и интеллектуальных технологий
Типовой расчет по дисциплине
«ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
АНАЛИЗ НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Вариант 11
Группа: А-01-20
Выполнил: Дашин И.Н.
Проверила: Сидорова Е.Ю.
Москва 2023
1. Задание на выполнение расчёта
Исходными данными для исследования нелинейной системы являются структурная схема системы с заданными параметрами звеньев и характеристика нелинейного элемента.
 Рис.1.
Исходная структурная схема нелинейной
системы.
Рис.1.
Исходная структурная схема нелинейной
системы.
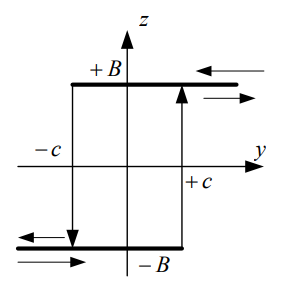
Рис. 2. Нелинейный элемент релейного типа (двухпозиционное реле с гистерезисом)
В
рамках настоящей работы исследуется
система при отсутствии входного
воздействия, т.е.
 .
.
Передаточные функции исходной системы заданы следующего вида:
 ; (1.1)
; (1.1)
 ; (1.2)
; (1.2)
 ; (1.3)
; (1.3)
z
=
 – характеристика
нелинейного элемента релейного типа
– характеристика
нелинейного элемента релейного типа
Параметры системы и нелинейного элемента:
№ |
a |
b |
|
|
|
Тип НЭ |
c |
h |
B |
11 |
1 |
0.64 |
3 |
5 |
0.2 |
3 |
5 |
8 |
5 |



h выбираем из условия h > c: берем из ближайшего по номеру варианта задания с нелинейным элементом вида 4, при котором соблюдается h> c=5. В данном случае ближайший подходящий вариант 4 с h=8.
2. Выполнение расчёта
2.1. Структурные преобразования исходной схемы (рис. 1.)
Объединим
передаточные звенья
 в звено
в звено
 ,
так как они соединены последовательно,
перемножим их передаточные функции:
,
так как они соединены последовательно,
перемножим их передаточные функции:
 (2.1)
(2.1)
Ветвь
со звеном
 и единичную обратную связь объединим
в эквивалентное звено
и единичную обратную связь объединим
в эквивалентное звено
 в соответствии с правилом параллельного
соединения:
в соответствии с правилом параллельного
соединения:
 (2.2)
(2.2)
В результате получим такую структурную схему:

Рис. 3. Приведённая структура схема нелинейной системы
В соответствии с (2.1) и (2.2) запишем связь между переменными в операторной форме:
 (2.3)
(2.3)
 (2.4)
(2.4)
Перейдём от операторной формы записи дифференциальных уравнений (2.1) и (2.2) к естественной форме с независимым аргументом t.
Подставляя в (2.3) и (2.4) заданные значения параметров и переходя от изображений к оригиналам, получим дифференциальные уравнения следующего вида:
 (2.5)
(2.5)
 (2.6)
(2.6)
Уравнения (2.5) и (2.6) и уравнение нелинейного элемента:
 (2.7)
(2.7)
полностью описывают динамику системы.
Подставим
выражение (2.7) для
 и (2.6) для
и (2.6) для
 в (2.5):
в (2.5):
 (2.8)
(2.8)
В результате получаются два типа дифференциальных уравнений с одинаковыми левыми частями и отличающихся значениями постоянных функций в правой части (75; -75). Отсюда следует, что на фазовой плоскости будут иметь место траектории двух типов. Неравенства указывают, в какой области фазовой плоскости справедливы решения (интегральные кривые) того или иного уравнения.
В
качестве координат фазовой плоскости
примем переменные
 Тогда система (2.8) представиться через
фазовые переменные следующим образом:
Тогда система (2.8) представиться через
фазовые переменные следующим образом:
 (2.9)
(2.9)
Из неравенств (2.9) могут быть найдены полупрямые, являющиеся границами областей с различными типами фазовых траекторий:
 (2.10)
(2.10)
Определим первый тип фазовых траектории. Для этого подставим значение z = 5 в уравнение (2.5) и запишем последнее в следующем виде:
 (2.11)
(2.11)
Введём новую переменную:
 (2.12)
(2.12)
Очевидно,
что
 .
Тогда уравнение (2.11) перепишется следующим
образом:
.
Тогда уравнение (2.11) перепишется следующим
образом:
 (2.13)
(2.13)
Для определения характера фазовых траекторий воспользуемся справочным материалом из методички (рис. 3.1. Виды фазовых траекторий) и представим уравнение (2.13) в виде:
 (2.14)
(2.14)
находим,
что
 и
и
 .
Таким образом, фазовые траектории
соответствуют рис. 3.1 (в) методического
указания - «Устойчивый фокус»
.
Таким образом, фазовые траектории
соответствуют рис. 3.1 (в) методического
указания - «Устойчивый фокус»
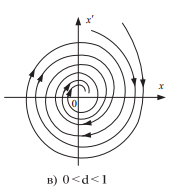
Рис. 4. Фазовые траектории типа «Устойчивый фокус»
Из
(2.12) следует, что
 ,
это значит, что фазовый портрет уравнения
(2.11) будет отличаться от портрета (2.13)
смещением всей картины по оси
,
это значит, что фазовый портрет уравнения
(2.11) будет отличаться от портрета (2.13)
смещением всей картины по оси
 на величину (+
на величину (+ ).
).
Второй тип фазовых траекторий отображается по аналогии с первым. Отличие заключается в смещении начала координат фазового портрета по оси на величину (- ).
Качественный
фазовый портрет нелинейной системы
представлен на (рис. 5), из него следуют,
что точки
 соответствуют устойчивому положению
равновесия.
соответствуют устойчивому положению
равновесия.
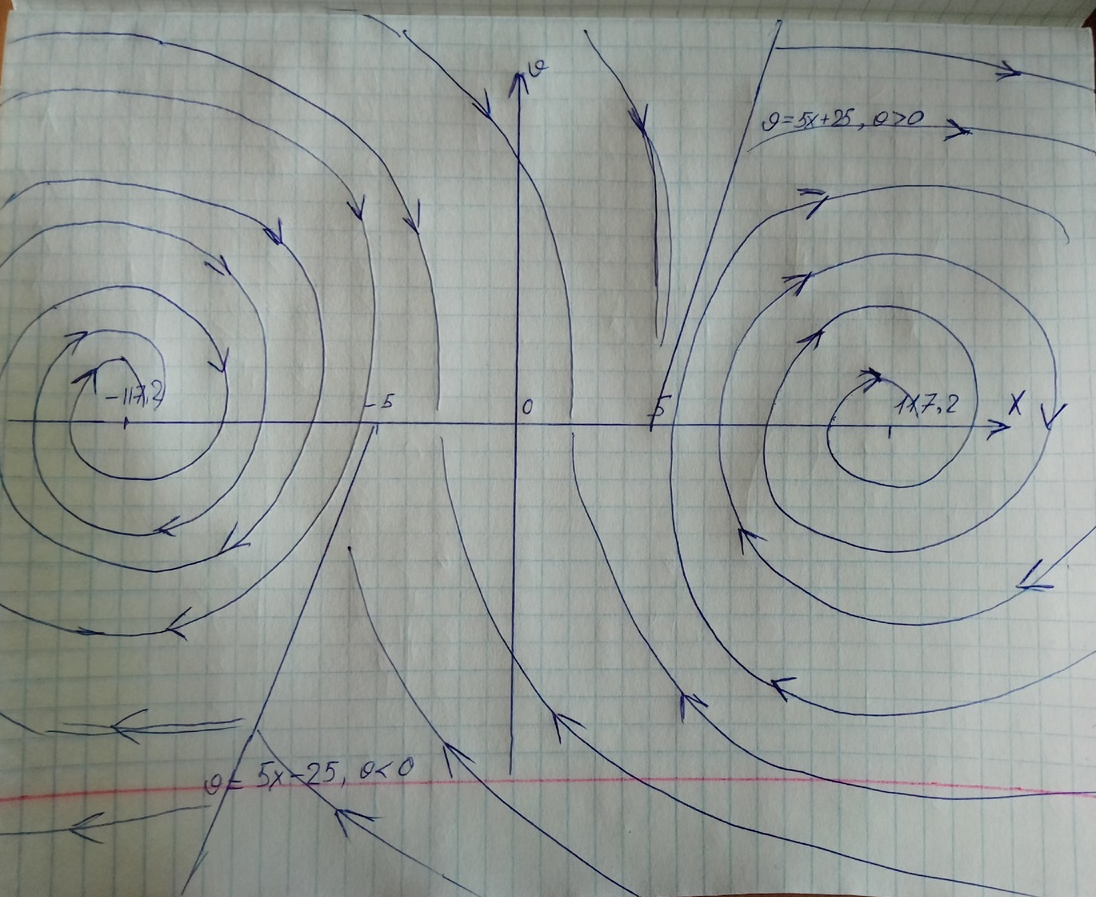
Рис. 5. Фазовый портрет нелинейной системы
2.2. Зададим модель системы (рис. 1.) в ППП MATLAB/Simulink с реализацией моделей звеньев в пространстве состояний.
Преобразуем
исходную структурную к виду (рис. 6.),
объединив при этом звенья
 в звено
в звено
 ,
получим структурную схему вида
,
получим структурную схему вида
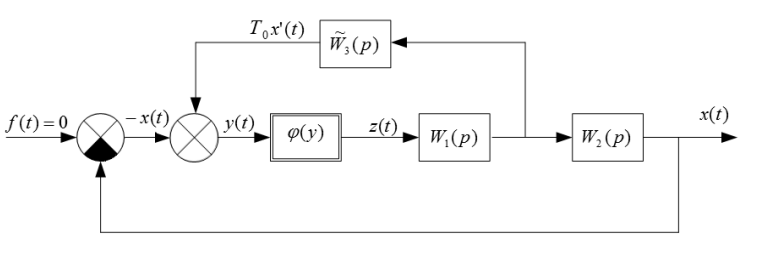
Рис. 6. Преобразованная структурная схема исходной системы
В
результате можно задать передаточные
функции
 и
и
 с помощью модели пространства состояний.
с помощью модели пространства состояний.
Для
>> g = [0 5];
>> h = [1 1 0.64];
>> [A,B,C,D] = tf2ss(g,h)
A =
-1.0000 -0.6400
1.0000 0
B =
1
0
C =
0 5
D =
0
Для
>> g = [1 0];
>> h = [1 1 0.64];
>> [A,B,C,D] = tf2ss(g,h)
A =
-1.0000 -0.6400
1.0000 0
B =
1
0
C =
1 0
D =
0
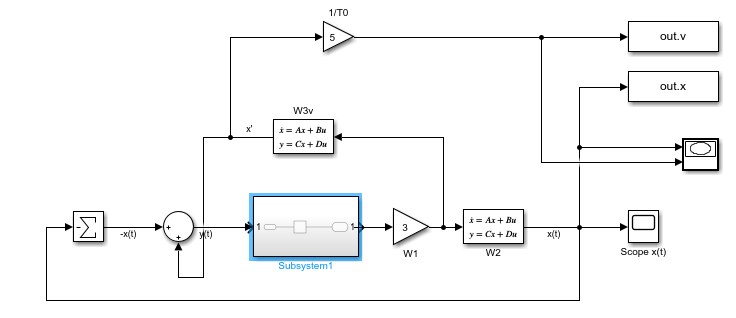
Рис. 7. Модель нелинейной системы в MATLAB/Simulink
где, NE3 – блок подсистемы, задающий НЭ3;
W1
– блок усиления, реализующий звено с
передаточной функцией
 ;
;
W2 – блок, реализующий звено с передаточной функцией в пространстве состояний;
W3v – блок, реализующий звено с передаточной функцией в пространстве состояний;
XX’ Graph – блок для построения фазового портера;
out.v, out.x – блоки, позволяющие передавать и хранить в переменных значения точек v и х для построения фазового портрета;
Scope x(t) – блок для построения графика процесса x(t).
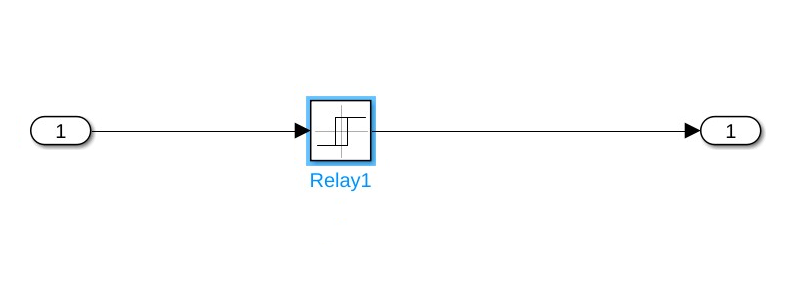

Рис. 8. Модель НЭ 3 с отображением заданных параметров для объекта Relay

Рис. 9. Задание параметров блоков W2, W3v
В новых версиях Simulink после реализации модели системы в workspace возвращается объект выхода, и к переменным x,v мы получаем доступ обращаясь к ним как к свойствам объекта out:
plot(out.x,out.v,'b-');
grid on;
Для построения фазового портера самостоятельно зададим несколько произвольных значений начальных условий и отобразим полученные траектории:
>> x1=out.x;
>> v1=out.v;
>> x2=out.x;
>> v2=out.v;
>> x3=out.x;
>> v3=out.v;
>> x4=out.x;
>> v4=out.v;
>> x5=out.x;
>> v5=out.v;
>> plot(x1,v1,'b-',x2,v2,'r-', x3, v3, "g-", x4, v4, "b-", x5, v5, "r-");
>> grid on
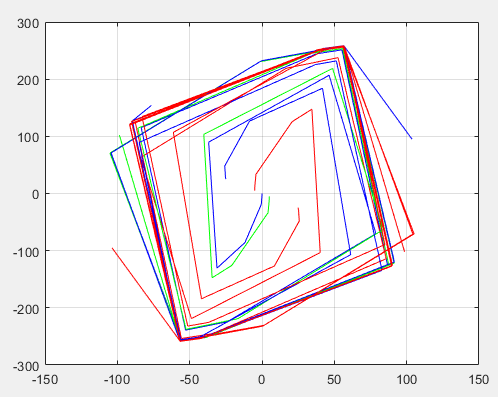
Рис. 10. Фазовые траектории системы
Здесь
по оси абсцисс отложена координата х,
а по оси ординат – координата
 .
В качестве начальных условий были заданы
5 точек с координатами (x,v):
(0,0), (1,-1), (-1,1), (-5,5), (5,-5).
.
В качестве начальных условий были заданы
5 точек с координатами (x,v):
(0,0), (1,-1), (-1,1), (-5,5), (5,-5).
В
пункте 2.1 исследования точки с координатами
 и
и
 соответствуют устойчивому положению
равновесия.
соответствуют устойчивому положению
равновесия.
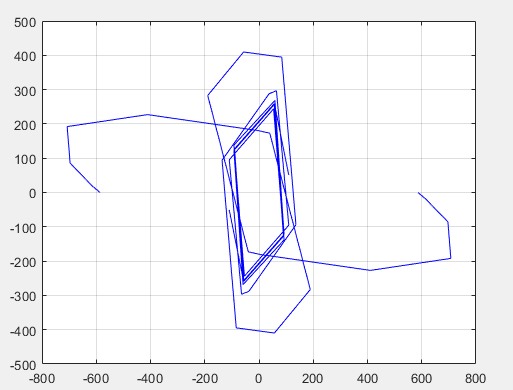
Рис.11.
Фазовые
траектории
для
(x,v)=
По графику фазовых траекторий, мы видим, что в системе присутствуют автоколебания.
Зададим
самостоятельно ещё три фазовые траектории
с начальными условиями согласно пункту
2 задания ( ),
(
),
( )
и (
)
и ( ),
и самостоятельно построим для них
графики изменения процесса x(t)
во времени. На рис. 12 отображены полученные
фазовые траектории, а на рис. 13-15 –
соответствующие им графики изменения
процесса x(t):
),
и самостоятельно построим для них
графики изменения процесса x(t)
во времени. На рис. 12 отображены полученные
фазовые траектории, а на рис. 13-15 –
соответствующие им графики изменения
процесса x(t):
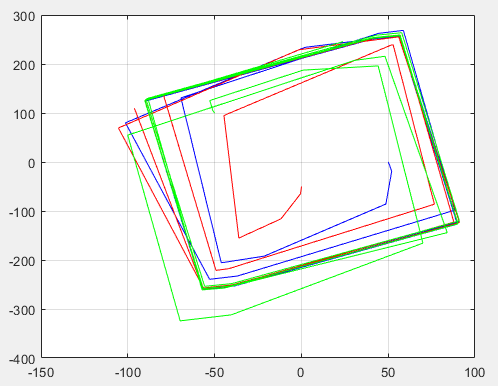
Рис.12. Фазовые траектории системы
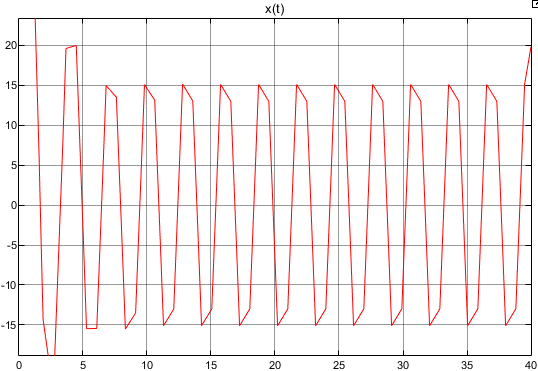
Рис.13. График процесса x(t) при НУ ( )

Рис.14. График процесса x(t) при НУ ( )
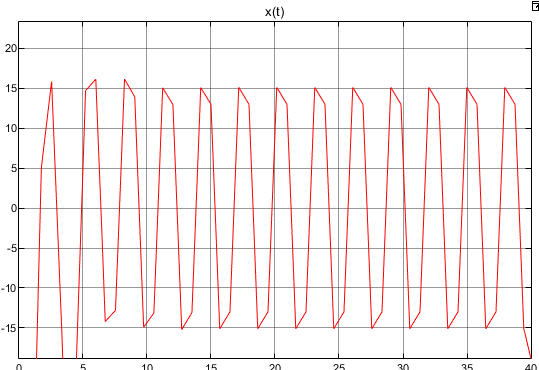
Рис.15. График процесса x(t) при НУ ( )
Как видно из рисунков 13-15, при различных начальных условиях в системе устанавливаются периодические процессы с одинаковыми периодами и амплитудами, то есть данные процессы являются устойчивыми автоколебаниями.