

Конспект лекций по дисциплине Электрические и электронные аппараты
.pdfтоковыми реле и автоматическими выключателями. При аварийных режимах максимально-токовая защита отключает потребитель от сети.
Выбор плавкой вставки при защите электродвигателей произво-
дится по току вставкиIВ , принимаемому по отношению к пусковому току двигателя IП . Для двигателей с короткозамкнутым ротором ток плавкой вставки определяется: при нормальном пуске с временем пуска менее 5 с IВ IП /2,5; при тяжелом пуске с временем более 5 с
IВ IП /(1,6 2) . Для двигателей с фазным ротором и двигателей по-
стоянного тока, у которых пусковой ток не превышает, как правило, 2IН
плавкая вставка выбирается из условия IВ (1 1,25)IН .
При защите электродвигателей максимально-токовыми реле их обмотки включаются в питающую сеть, а контакты – в цепь питания контактора или магнитного пускателя. Схемы включения максимальнотоковых реле приведены на рис. 16.1
Рис. 16.1. Схемы включения максимально-токовых реле
123
Токи уставок реле и максимально-токовых расцепителей автоматических выключателей принимаются: для асинхронных двигателей с
короткозамкнутым ротором Iуст (1,2 1,3)Iп , для АД с фазным рото-
ром и двигателей постоянного тока Iуст (2 2,5)Iндв , для схем
управления Iуст 2,5Iуст .
Если несколько двигателей с фазным ротором питаются через общий ввод (рис. 16.1,б), то уставка реле КА1 и КА2 должна бытьIуст (2,25 2,5)Iном.дв . Уставка реле КА0 составляет:
Iуст (1,25 1,5)I1ном.дв25 Iном.дв25 ,
где I1ном.дв25 - номинальный ток двигателя наибольшей мощности (ре-
жим ПВ=25%);
Iном.дв25 - сумма номинальных токов всех двигателей, защищае-
мых КА0.
Если двигатели включаются на длительный режим, то принимает-
ся Iном.дв Iном.дв25. Коммутационная способность КА должна соот-
ветствовать номинальным значениям тока и напряжения катушек контакторов КМ, КМ1, КМ2, в цепи которых включены контакты реле. Ток
отключения реле Iотк.р Iкат - тока катушки контактора.
Если токи цепи двигателей достаточно велики, то реле защиты включаются в силовую цепь с помощью трансформатора тока ТА (рис. 16.1, в).
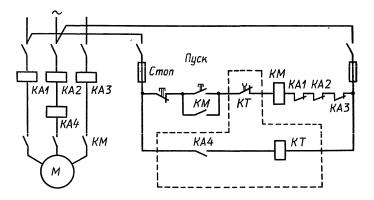
Для того чтобы защитить двигатель при затянувшемся пуске или кратковременной пиковой перегрузке, КА воздействует на контактор через реле времени КТ (рис. 16.2), которое запускается с помощью реле КА4.
При нормальном пуске или кратковременной перегрузке, безопасной для двигателя, время пуска или перегрузки меньше времени выдерж-
ки реле времени tкт , и контактор КМ в цепи двигателя М не отключает-
ся. После нормального пуска реле КА4 отпадает и снимает напряжение с реле КТ. Если время пуска или перегрузки больше времени выдержки
реле КТ tпуск tкт , то контакты КТ размыкаются, контактор КМ отклю-
чается и двигатель М обесточивается. Такая же схема может использоваться в схемах реверса двигателя.
Ток возврата реле должен быть больше номинального тока двигателя на 30%. Номинальные токи реле и двигателя должны удовлетворять
условию Iном.р Iном.дв .
124
Ток уставки реле КА4 выбирается по условию Iуст 0,75Iпуск .
Рис. 16.2. Схема максимальной токовой защиты с реле времени
Защита двигателей от снижения напряжения предотвращает самозапуск двигателей после восстановления напряжения питания.
При коротком замыкании в сети напряжение на двигателях уменьшается, а ток в статоре возрастает. Если К3 длится 0,03-0,05 с, тo, как правило, линейные контакторы и магнитные пускатели не успевают отключить двигатель от сети, а частота его вращения не меняется.
При перерыве подачи напряжения более 0,5 с происходит отключение двигателей у неответственных потребителей, причем после восстановления напряжения их повторное включение произойти не должно.
Для защиты от понижения напряжения применяются электрoмагнитные реле напряжения. При понижении напряжения сети такое реле размыкает свой контакт в цепи катушки контактора КМ, который отключает двигатель от сети, и он останавливается. Для обеспечения самозапуска двигателя после исчезновения напряжения сети применяется схема, приведенная на рис. 16.3.
Запуск производится с помощью переключателя SA, который имеет два контакта: контакт 1 замыкается при переводе рукоятки в положение «Пуск» и остается замкнутым при её возврате в положение 0.
При повороте рукоятки в положение «Стоп» контакт 1 размыкается и остается разомкнутым при её переводе в положение 0. В положении «Пуск» рукоятки контакт 2 переключателя замыкается и подается напряжение на реле напряжения KV. Контактами КV подается питание на катушку контактора КМ, который включается и запускает двигатель. После включения контактора КМ замыкается его вспомогательный контакт КМ, который подает напряжение на реле KV после установки переключателя SA в нулевое положение и размыкания контакта 2. При исчезно-
125
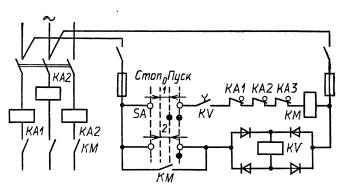
вении напряжения в сети цепь катушки контактора КМ в течение времени t 0,5с остается замкнутой, т.к. реле КV удерживает свой контакт в
замкнутом состоянии в течение выдержки времени 0,5 с. Если в течение 0,5 с напряжение в сети восстанавливается, то контактор КМ включается и происходит самозапуск двигателя. Если длительность перерыва более 0,5 с, то реле КV отключается и размыкает своим контактом цепь катушки контактора КМ. Самозапуск двигaтеля при восстановлении напряжения не происходит.
Рис. 16.3. Схема защиты двигателя при исчезновении напряжения сети
Для ответственных двигателей время самозапуска может быть установлено до 10 с.
При выборе реле следует проверить коммутационную способность контактов реле по току и напряжению катушки управляемого контактора.
Тепловая защита обеспечивает защиту двигателей от перегрузки. Она осуществляется электротепловыми, максимально-токовыми реле и автоматами с тепловыми расцепителями.
Сложность конструкции тепловых реле, недостаточно высокая надежность систем зaщиты на их основе привели к созданию теплoвой защиты, реагирующей непосредственно на температуру защищаемoгo объекта (температурная защита). При этом датчики температуры устанавливаются на обмoтке двигателя. В качестве датчиков температуры пoлучили применение термисторы и позисторы. Термистор – это резистор с большим отрицательным температурным коэффициентом сопротивления (ТКС). При увеличении температуры сопротивление термистора уменьшается, что используется для схемы отключения двигателя. Для увеличения крутизны зависимости сопротивления от температуры термисторы, наклеенные на три фазы обмоток двигателя, включаются параллельно (рис. 16.4).
126
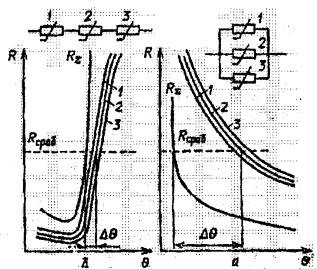
Рис. 16.4. Зависимость сопротивления позисторов и термисторов от температуры:
а– последовательное соединение позисторов; б – параллельное соединение термисторов
Позистор является нелинейным резистором с положительным ТКС. При достижении определенной температуры сопротивление позистора скачкообразно увеличивается на несколько порядков.
Для усиления этого эффекта позисторы разных фаз двигателя соединяются последовательно. Характеристика позисторов показана на рис. 16.4, а.
Защита с помощью позистоpoв является более совершенной. В зависимости от класса изоляции обмоток двигателя берутся позисторы на
температуру срабатывания 105, 115, 130, 145 и 1600С . Эта температу-
ра называется классификационной.
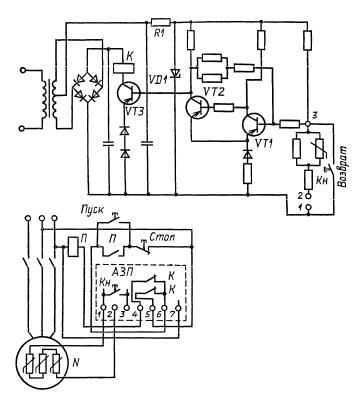
На рис. 16.5 представлена схема позисторной защиты электродвигателя.
К контактам 1, 2 схемы (рис. 16.5, а) подключаются позисторы, установленные на всех трёх фазах двигателя (рис. 16.5, б). Транзисторы VТ1, VT2 включены по схеме триггера Шмидта и работают в ключевом режиме. В цепь коллектора транзистора VT3 оконечного каскада включено выходное реле К, которое воздействует на обмотку пускателя.
При нормальной температуре обмотки двигателя и связанных с ним позисторов сопротивление последних мало.
127
а
б
Рис. 16.5. Аппарат позисторной защиты с ручным возвратом: а – принципиальная схема; б – схема подключения к двигателю
Сопротивление между точками 1-2 схемы также мало, транзистор VT1 зaкрыт (на базе малый отрицательный потенциал), транзистор VТ2 открыт (на базе большой отрицательный потенциал). Отрицательный потенциал на коллекторе транзистора VT3 мал, и он закрыт. При этом ток в обмотке реле К недостаточен для его срабатывания. При нагреве обмотки двигателя сопротивление позисторов увеличивается, и при определенном значении этого сопротивления отрицательный потенциал точки 3 достигает напряжения срабатывания триггера. Релейный режим триггера обеспечивается эммитерной обратной связью (сопротивление в цепи эммитера VТ1) и коллекторной обратной связью между коллектором VT2 и базой VT1. При срабатывании триггера VТ2 закрывается, а VT3 открывается. Срабатывает реле К, замыкая цепи сигнализации и размыкая цепь электромагнита пускателя, после чего обмотка статора отключается от напряжения сети.
128

После охлаждения двигателя его пуск возможен после нажатия кнопки «Возврат», при котором триггер возвращается в начальное положение.
В современных электродвигателях позисторы защиты устанавливаются на лобовой части обмоток двигателя. В двигателях прежних разработок позисторы можно приклеивать к лобовой части обмоток.
Лекция № 17
Датчики неэлектрических величин
Датчики представляют собой электрические аппараты, предназначенные для преобразования непрерывного изменения входной (контролируемой) неэлектрической величины в пропорциональное изменение выходной электрической величины. Входные величины могут отражать самые разнообразные физические явления - линейное или угловое перемещение, скорость, ускорение, температуру твердых, жидких и газообразных тел, усилие, давление и т. д. В качестве выходных величин чаще всего используются активное, индуктивное, емкостное сопротивление, ток, ЭДС, падение напряжения, частота и фаза переменного тока.
Основной характеристикой датчика является чувствительность:
S Y ,
X
где ΔY, ΔX – приращения выходной и входной величин. Часто пользуются понятием относительной чувствительности:
Y/Y
S0 X/X ,
где Y, X – полные изменения выходной и входной величин.
Номинальной характеристикой датчика называется зависимость выходной величины от входной. Эта характеристика приводится в паспорте датчика и используется как расчетная при измерениях. Экспериментально снятая характеристика вход - выход отличается от номинальной на погрешность.
На погрешность оказывают влияние внешние условия эксплуатации: температура, магнитные и электрические поля, напряжение и частота источника питания, механические и радиационные воздействия и др.
В лекции рассматриваются датчики, которые по принципу действия и конструкции близки к электрическим аппаратам. Эти датчики могут быть подразделены на контактные и бесконтактные.
129
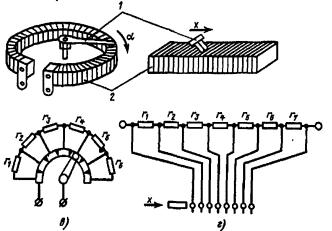
К контактным датчикам относятся резистивные датчики, в которых подвижный скользящий контакт 1 переменного резистора связан с элементом, перемещение которого контролируется (рис. 17.1, а, б).
Если сечение каркаса 2, на котором намотан резистор, всюду одинаково, то сопротивление датчика меняется пропорционально углу поворота α или ходу X.
б
а
в |
|
|
|
г |
|
|
|
|
Рис. 17.1. Различные исполнения резистивных датчиков
Чувствительность резистивных датчиков может быть 3 – 5 В/мм. Погрешность работы датчиков зависит от стабильности питающего напряжения, точности изготовления конструктивных деталей, темпе-
ратурной стабильности использованного проводникового материала. Для повышения температурной стабильности следует применять проволоку с малым температурным коэффициентом сопротивления.
Резистивные датчики используются для измерения линейных и угловых перемещений. С их помощью можно измерить уровень и расход жидкости (датчик соединяется с поплавком), силу (датчик соединяется с упругим элементом, деформируемым измеряемой силой), размеры и т. д.
Преимущества резистивных датчиков заключаются в простоте конструкции, точности работы до 0,5 %, малых массе и габаритах. Недостатком является наличие подвижного контакта, ухудшающего надежность работы и уменьшающего срок службы.
К бесконтактным датчикам относятся индуктивные, трансформаторные, дифференциальные, магнитоупругие, индукционные и др.
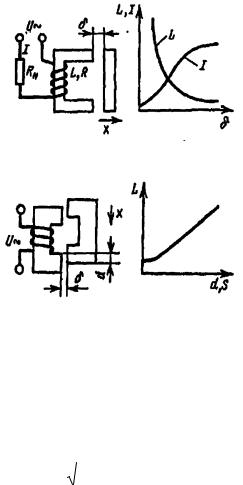
Рассмотрим простейший индуктивный датчик (рис. 17.2, 17.3).
130
аб
Рис. 17.2. Индуктивный датчик с изменяющимся зазором
аб
Рис. 17.3. Индуктивный датчик с изменяющейся площадью зазора
Если пренебречь магнитным сопротивлением стали, потоками рассеяния и выпучивания, то индуктивность обмотки:
L w2 δ |
w2 |
μ0S |
. |
|
|
|
(17.1) |
|
|
|
|
|
|||||
Ток в цепи обмотки: |
|
2δ |
|
|
|
|
||
|
U |
|
|
|
|
|||
I |
|
|
|
|
. |
(17.2) |
||
|
|
|
|
|
|
|||
|
|
(Rн R)2 |
(ωL)2 |
|
||||
Индуктивность обмотки L и протекающий по ней ток I могут изменяться за счет изменения зазора δ или его площади S.
На рис. 17.2, а представлен датчик с изменяемым зазором δ, а на рис. 17.3 с изменяемой площадью S зазора, пропорциональной координате перемещения d. Зависимость индуктивности и тока от величины зaзopа дана на рис. 17.2, б, а зависимость L от S или координаты d - на рис. 17.3, б.
Погрешности индуктивных датчиков определяются стабильностью напряжения и частоты источника питания, влиянием температуры на активное сопротивление обмотки и размеры рабочего зазора.
131

Чувствительность индуктивного датчика определяется зависимо-
стями: |
|
|
|
|
|
|
|
|
|
|
|
|
при изменении зазора: |
L |
|
|
|
L0 |
|
|
|
|
|
||
Sδ |
|
|
|
|
|
|
; |
(17.3) |
||||
δ |
|
|
δ 2 |
|
||||||||
|
|
|
δ0 1 |
|
|
|
|
|
||||
|
|
δ0 |
|
|
|
|||||||
при изменении площади: |
|
|
|
|
|
|
|
|||||
|
|
|
L |
|
|
L0 |
|
|
|
|||
|
|
|
|
|
|
|
|
(17.4) |
||||
|
|
Ss |
|
S |
|
S0 |
, |
|||||
|
|
|
|
|||||||||
где L0 - начальное значение индуктивности датчика при |
δ δ0 и |
|||||||||||
S S0; |
|
|
|
|
|
|
|
|
|
|
|
|
δ0,S0 - длина зазора и его площадь в начале хода;
δ и S - изменение зазора и площади.
Таким образом, чувствительность S является нелинейной функ-
цией δ. Для работы с малой нелинейностью целесообразно выбирать
δ/δ0 0,2.
На якорь описанных выше датчиков действует сила, создающая механическую нагрузку на элемент, перемещение которого контролируется. Эта сила определяется зависимостью:
Р Рm sin2 ωt 2 |
Bm |
2 |
Ssin2 ωt. |
(17.5) |
μ0 |
|
|||
|
|
|
|
Для устранения этого недостатка применяют дифференциальные датчики. Дифференциальный датчик содержит две совершенно одинаковые и симметричнорасположенные электромагнитные системы (рис. 17.4, а).
Токи в обмотках w1,w2 равны: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
I1 |
|
|
|
|
U |
|
|
|
|
|
|
|
; |
|
|
|
(17.6) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
(Rн R)2 ω2(Lн |
k |
|
S |
)2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
δ1 |
|
|
|
|
||||
I2 |
|
|
|
|
U |
|
|
|
|
|
|
|
|
. |
(17.7) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
|
2 |
|
|
|
|
|
S |
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
(Rн R) ω |
|
k δ δ |
|
||||||||||
|
|
|
|
Lн |
|
|
|||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|||||||
где k - конструктивный фактор;
R - активное сопротивление обмотки.
132