


7
1.2. Довільна система сил
Плоскою довільною називається система сил, лінії дії яких належать одній площині і не перетинаються в одній точці (рис.1.12).
Рис. 1.12 Рис. 1.13
Еквівалентними перетвореннями така система сил може бути заміненою рівнодійною силою або парою сил – двома силами, які мають однакові модулі і діють в протилежних напрямках вздовж паралельних прямих. У практичних задачах довільну систему сил зводять до вибраного центра, визначивши головний вектор – геометричну суму всіх сил системи, лінія дії якого проходить через центр приведення, та головний момент – суму моментів усіх сил відносно центра приведення. Моментом сили P відносно точки (центра) О називається вектор, отриманий векторним
множенням радіус-вектора r (від центра О до точки прикладання сили) на вектор сили |
P (рис. |
1.13) |
|
M0 P r P. |
(1.5) |
Згідно правил векторного добутку модуль M моменту сили відносно точки дорівнює добутку абсолютної величини сили P на відстань від точки О до лінії дії сили P .
M0 P P r sin P h |
(1.6) |
(величину h називають плечем сили P відносно точки О).
Вектор моменту перпендикулярний до площини, якій належать лінія дії сили P і точка О. Він направлений в той бік, звідки найкоротшим поворотом r до P здійснюється назустріч рухові стрілки годинника. Тому в плоских задачах момент M0 Pi вважатимемо додатнім, якщо тверде ті-
ло, уявно шарнірно закріплене в точці О, під дією сили P обертатиметься назустріч годинниковій стрілці.
Момент рівнодійної сили, згідно теореми Варіньона, відносно будь-якої точки дорівнює сумі моментів всіх сил системи відносно цієї точки.
Якщо, R n Pi , то
i 1
|
R M |
|
Pi |
Pi ri sin i |
|
8 |
M0 |
0 |
Pi hi . |
(1.7) |
|||
|
n |
|
|
n |
n |
|
|
i 1 |
|
|
i 1 |
i 1 |
|
Приведення плоскої довільної системи сил до вибраного центра О можна виконати графічно або аналітично.
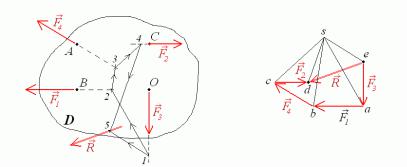
Графічне розв’язування полягає у визначенні вектора рівнодійної сили заданій системі сил та паралельного перенесення його до центра приведення. При цьому до тіла D потрібно прикласти момент, який рівнодійна утворювала відносно центра приведення до її перенесення. Рівнодійний вектор у загальному випадку можна побудувати послідовним геометричним додаванням усіх сил системи за правилом паралелограма. В часткових випадках, коли лінії дії сил паралельні, правило паралелограма не дозволяє визначити лінію дії сумарного вектора. Універсальним способом знаходження рівнодійної довільної системи сил на площині є побудова силового і мотузкового багатокутників. Силовий багатокутник (рис.1.14,б) – ланцюжок послідовно вишикуваних сил системи Fi (в прийнятому масштабі сил), замкнений рівнодійним вектором R , що поєднує першу точку цієї послідовності е з останньою – d. В околі силового багатокутника вибирається довільна точка
а |
б |
Рис. 1.14
– полюс s – яка поєднується відрізками (променями) з вершинами багатокутника. Мотузковий багатокутник створюють на кресленні диска, виконаному в певному масштабі (рис.1.14,а). Розпочинається побудова з вибору на лінії дії сили F3 , яка є першою ланкою силового багатокутника, до-
вільної точки 1. Через цю точку проводиться промінь, паралельний відрізку sа, що поєднує полюс s з кінцевою точкою першого вектора силового ланцюжка (рис.1.14,б). Точка 2 на перетині променя sa з лінією дії F1 – наступної (другої) сили у ланцюжку, є початком чергового променя, побу-
дованого паралельно прямій sb, що проходить через полюс і закінчення другої за раніше установленою послідовністю сили. Ці дії повторюються до визначення точки 4. Завершується побудова мотузкового багатокутника знаходженням точки 5 на перетині двох променів, проведених з першої (точки 1) та останньої (точки 4) точок паралельно відповідно se та sd у силовому багатокутнику. Ці промені спираються на вектор рівнодійної сили. Через відшукану точку 5 проходить лінія дії вектора рівнодійної сили (рис.1.14,а), напрямок якої і величина визначені в силовому багатоку-

9
тнику (рис.1.14,б). Для приведення системи сил до заданого центра О потрібно вектор рівнодійної сили перенести паралельно собі до точки О і при цьому, щоб не змінився механічний стан диску, доповнити головний вектор моментом, який рівнодійна сила створювала відносно вибраного центра до перенесення – головним моментом системи (рис.1.15,б). Модуль головного моменту можна порахувати, помноживши модуль головного вектора на плече – найкоротшу відстань від точки О до лінії дії рівнодійного вектора. Знак головного моменту визначається напрямком "обертання" вектора рівнодійної сили тіла D відносно "закріпленої" точки О.
а |
б |
Рис. 1.15
Аналітичне приведення довільної системи сил до заданого центра полягає у визначенні проекцій головного вектора на осі вибраної системи координат за формулами (1.1), його модуля (1.2) і направляючих кутів (1.3). Головний момент, згідно теореми Варіньона, дорівнює векторній сумі моментів всіх сил системи відносно точки О
|
|
n |
|
|
|
|
M 0 |
R M 0 |
Pi .. |
(1.5) |
|||
|
|
i 1 |
|
|
|
|
У проекції на вісь, що перпендикулярна площині, в якій розв’язується задача, |
|
|||||
M0 R |
n |
|
Pi . . |
|
||
M0 |
(1.6) |
|||||
i 1
Достовірність отриманих результатів підтверджується порівнянням величин проекцій і модуля головного вектора та його направляючих кутів, а також величини головного моменту, визначених аналітично і графічно. Критерієм точності є відносна похибка, яка обчислюється за формулою (1.4).
Рис. 1.12

10
Приклад 2.
Дано: абсолютно тверде тіло D,
плоска довільна система сил F1 , F2 , F3 , F4 (рис.1.16).
F1 =10 кН, F2 =15 кН,
F3 =10 кН, F4 =20 кН.
Необхідно: привести задану систему сил до центра А.
Аналітичне розв’язування:
Вибираємо систему координат Oxy (рис.1.16). Проекції головного вектора на осі системи координат:
4
Rx Fix F1x F2x F3x F4x
i1
F1 cos45 F2 cos0 F3 cos90 F4 cos150
10 0,7071 15 1 10 0 15 0,8660 9,08 кН;
4
Ry Fiy F1y F2 y F3y F4 y i 1
F1 cos45 F2 cos90 F3 cos0 F4 cos3010 0,7071 15 0 10 1 15 0,5 24,57 кН.
Модуль головного вектора:
R 
 Rx2 Ry2
Rx2 Ry2 
 9,082 24,572 26,19кН.кН.
9,082 24,572 26,19кН.кН.
Напрямні кути:
arccos RRx arccos 26,199,08 arccos 0,3466 69,72 ;
arccos RRy arccos 24,5726,19 arccos 0,9380 20,28 .
Головний момент системи сил, приведеної до центру А
M A R 4 M A Fi
i1
F1 cos45 4 F1 cos45 0 F3 2 F2 0 F4 cos60 0 F4 cos30 2
10 0,7071 4 10 0,7071 0 10 2 15 0 20 0,8660 2 20 0,5 0
82,93кН.

11
Графічне розв’язування
Рис. 1.17
Порівняння результатів розв’язування двома способами виконується в таблиці 1.2:
|
|
|
|
Таблиця 1.2 |
Параметр |
Аналітичний |
Графічний |
Відносна |
|
|
|
спосіб |
спосіб |
похибка (%) |
Rx (кН) |
9,08 |
9,0 |
0,8 |
|
|
|
|
|
|
Ry (кН) |
24,57 |
24,5 |
0,3 |
|
|
|
|
|
|
R |
(кН) |
26,19 |
26,0 |
0,9 |
|
|
|
|
|
(град.) |
69,72 |
69,5 |
0,3 |
|
|
|
|
|
|
|
(град.) |
20,28 |
20,5 |
1,1 |
|
|
|
|
|
М |
( кНм) |
- 82,93 |
- 81,7 |
1,5 |
|
|
|
|
|