

Методическое пособие 659
.pdfОбобщенными координатами являются углы 1, 2 и длина стрелы r. Взаимосвязь движений по координатам про-
является в наличии функциональных параметров A 1(r, 2), A 2(r) матрицы A(q), коэффициентов матрицы B(q,q), зави-
сящих от координат и их производных, а также функциональных параметров в матрице C(q) вследствие изменения потен-
циальной энергии при движении по координатам 2, r.
1.6.Уравнения движения манипулятора
вугловой системе координат
Расчетная схема манипулятора, работающего в угловой системе координат, приведена на рис. 1.4. Звено 1 имеет массу m1 и момент инерции J1 относительно оси вращения Оx2. Через m2, m3 и m обозначены, соответственно, массы звеньев 2, 3 и рабочего органа. Рассматриваемый манипулятор имеет три вращательные кинематические пары. Обобщенными коорди-
натами являются углы поворота 1, 2, 3.
x2 l2 |
2 |
l03 |
l3 |
|
|
|
|||
l02 |
3 |
m3 |
||
m2 |
||||
m |
||||
|
|
3 |
||
2 |
|
|
|
|
J1 |
|
|
x1 |
l1 |
m1 |
l01 1
0 |
1 |
x3 |
Рис. 1.4. Расчетная схема трехкоординатного манипулятора в угловых координатах
20
Уравнения Лагранжа для рассматриваемого трехкоординатного манипулятора имеют вид
d |
W |
|
W |
|
П |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
M |
j |
, j 1,2,3, |
(1.51) |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
j |
|
j |
|
j |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где M j – моменты, развиваемые электроприводами в сочленениях вращательного типа.
Звено 1 участвует только во вращательном движении по
координате 1, поэтому его кинетическая энергия определяется из выражения
|
|
2 |
/ 2. |
(1.52) |
W1( |
1 ) = J1 |
1 |
Звенья 2 и 3 совершают сложные движения. Обозначим через V2, V3 и V значения скоростей точек, в которых сосредоточены массы m2, m3 и m. Тогда для определения кинетической энергии звеньев 2, 3 и груза m запишем следующие выражения:
|
3 |
|
3 |
W2 = m2V22 |
/2 = m2 xs22 /2, |
W3 = m3V32/2 = m3 |
xs23 /2, |
|
s 1 |
3 |
s 1 (1.53) |
|
Wm = mV2/2 = m xs2/2. |
|
|
s 1
Квадрат скорости точки m2 определяется из выражения, аналогичного (1.37):
(1.54)
Координаты xs3 точки m3 определяются из выражений: x13 [l2 cos 2 l03 cos( 2 3)] sin 1 ,
x23 l2 sin 2 l03 sin( 2 3 ) l1 , |
(1.55) |
x33 [l2 cos 2 l03 cos( 2 3)] cos 1 . |
|
21
Дифференцируя xs3 по времени, получим |
|
|||||
x13 [ l2 |
2 |
sin |
2 l03( 2 |
|
3) sin( 2 3)] sin 1 |
|
|
|
|
|
|
|
|
[l2 cos 2 |
l03 cos( 2 3)] cos 1 1, |
|
||||
|
|
|
|
|
|
(1.56) |
x23 l2 2 cos 2 l03( 2 3) cos( 2 3), |
||||||
|
2 |
|
|
|
|
|
x33 [ l2 |
sin 2 l03( 2 |
|
3) sin( 2 3)] cos 1 |
|
||
|
|
|
|
|
|
|
[l2 cos 2 l03 cos( 2 3)] sin 1 1.
Квадрат скорости точки m3 равен
V3 |
2 |
|
2 |
|
2 |
|
2 |
. |
(1.57) |
|
= x13 |
+ x23 |
+ x33 |
|
|||||
Подставляя в (1.57) выражения для определения скоростей x13, x23 и x33 из (1.56), после ряда тригонометрических преобразований получим следующее уравнение:
V3 |
2 |
2 |
|
2 |
2 |
2 |
|
2 |
]+l03 |
2 |
|
|
2 |
2 |
|
|
2 |
]– |
|||
|
=l2 |
[ |
2 |
+cos |
|
1 |
|
[( |
2 + |
3 ) +cos |
( 2+ 3) |
1 |
|||||||||
|
|
–2l2l03[cos 3 |
|
2 ( |
2 |
+ |
3 ) +cos 2cos( 2+ 3) |
1 ]. |
|
(1.58) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Аналогичным образом выводится выражение для квадрата скорости точки m, имеющее следующий вид:
V |
2 |
=l2 |
2 |
|
2 |
2 |
|
|
|
2 |
]+l3 |
2 |
[( |
|
|
2 |
2 |
( |
2+ 3) |
|
2 |
]– |
|||
|
|
[ |
2 |
+cos |
2 |
1 |
|
|
2 + |
3 ) +cos |
|
1 |
|||||||||||||
|
|
–2l2l3 [cos 3 |
|
2 |
( |
2 + |
3 ) +cos 2cos( 2 |
+ 3) |
1 |
]. |
(1.59) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Кинетическая энергия W системы определяется из выражения
W = W1 + W2 + W3 + Wm. |
(1.60) |
На основе уравнений (1.52)–(1.54), (1.58)–(1.60) получим следующее выражение:
W( 2, 3, 1 , 2 , 3 ) = J1 12 / 2 + m2 l022( 12 cos2 2 + 22 ) /2 + + m3{l22[ 22 + cos2 2 12 ]+l032[( 2 + 3 )2 + cos2( 2+ 3) 12 ] –
–2l2l03[cos 3 2 ( 2 + 3 ) + cos 2 cos( 2+ 3) 12 ]}/2 +
+m{l22[ 22 + cos2 2 12 ] + l32[( 2 + 3 )2 + cos2( 2+ 3) 12 ] –
– 2l2l3[cos 3 |
|
2 |
( |
2 |
+ |
3 ) + cos 2cos( 2 |
+ 3) |
1 ]}/2. (1.61) |
|
|
|
|
|
|
|
|
2 |
22
Частные производные от кинетической энергии по производным от обобщенных координат равны
W / |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
2 |
|
2 |
|
|
|
|
|
2 |
|
|
|
2 |
|
1 1[J1 (m2l02 |
ml2 |
|
m3l2 )cos |
|
2 (m3l03 ml3 ) |
||||||||||||||||||||||||
cos2( |
2 |
|
|
3 |
) |
2l |
(m l |
|
|
ml )cos |
2 |
cos( |
2 |
|
3 |
)], |
|
||||||||||||
|
|
|
|
|
|
|
|
2 |
3 03 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||||||
W |
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
2 |
(1.62) |
||
/ 2 |
2(m2l02 ml2 m3l2 ) |
( 2 3)(m3l03 ml3 ) |
|||||||||||||||||||||||||||
|
|
|
|
(2 2 |
|
3)l2(m3l03 ml3)cos 3, |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
/ 3 |
( 2 3)(m3l03 ml3 ) 2l2(m3l03 ml3)cos 3. |
|
|||||||||||||||||||||||||||
|
Производные |
|
от |
W( 2 |
, 3, |
1 , 2 , 3 ) |
|
по |
обобщенным |
||||||||||||||||||||
координатам |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
W / 1 0, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
2 |
|
|
|
|
2 |
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
||
W / 2 1 |
{(m2l02 m3l2 ml2 )sin2 2 (m3l03 |
|
|
|
|||||||||||||||||||||||||
ml2)sin[2( |
2 |
|
)] 2(m l |
l |
03 |
ml l )sin(2 |
2 |
|
3 |
)}/2, |
(1.63) |
||||||||||||||||||
3 |
|
|
|
|
3 |
|
|
3 2 |
|
|
|
2 3 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
2 |
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
W / 3 |
1{(m3l03 ml3 )sin[2( 2 3)]/2 l2 cos 2 |
|
|||||||||||||||||||||||||||
(m3l03 ml3)sin( 2 |
3)} |
2 |
( 2 3)(m3l03 |
ml3)l2 sin 3. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Выражение для потенциальной энергии П системы имеет вид
П( 2, 3)=m1gl01+m2g(l1+l02sin 2)+m3g(l1+l2sin 2 –
–l03 sin ( 2+ 3)]+mg[l1+l2sin 2 – l3sin ( 2 + 3)]. (1.64)
Производные от П( 2, 3) по обобщенным координатам:
П / 1 |
0, |
П / 3 g(m3l03 |
ml3)cos( 2 3), |
П / 2 |
g(m2l02 |
m3l2 ml2)cos 2 |
g(m3l03 ml3) (1.65) |
|
|
cos 2 3 . |
|
Подставляя в систему (1.51) выражения для частных производных (1.62), (1.63) и (1.65), после проведения операции дифференцирования по времени и выполнения ряда тригонометрических преобразований получим следующие уравнения динамики манипулятора в угловой системе координат:
23
1[J1 (m2l022 ml22 m3l22)cos2 2 (m3l032 ml32)
cos2( 2 3) 2l2(m3l03 ml3)cos 2 cos( 2 3)]
1{ (m2l022 ml22 m3l22)sin2 2 2 (m3l032 ml32)
sin[2( 2 3)]( 2 3) 2l2(m3l03 ml3)[sin(2 2 3) 2
cos 2 sin( 2 3) 3]} M 1,
|
2 |
|
2 |
|
|
2 |
2 |
|
|
|
2 |
2l2 cos 3(m3l03 ml3)] |
|
||||||
2[m2l02 m3l2 |
ml2 |
m3l03 |
ml3 |
|
|||||||||||||||
3[m3l03 |
ml3 |
|
l2 cos 3(m3l03 |
ml3)] l2(2 2 |
3)sin 3 |
|
|||||||||||||
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
2 |
2 |
|
|
|
2 |
|
(1.66) |
|
3(m3l03 |
ml3) 1 |
{(m2l02 |
m3l2 |
ml2 )sin2 2 (m3l03 |
|||||||||||||||
ml2)sin[2( |
2 |
|
)] 2(m l |
l |
03 |
ml l )sin(2 |
2 |
|
)}/2 |
|
|
||||||||
3 |
|
|
|
|
3 |
|
3 2 |
|
|
2 3 |
|
3 |
|
|
|
||||
g(m2l02 |
m3l2 ml2)cos 2 g(m3l03 ml3)cos( 2 3) |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
M 2, |
|
|
|
|
|
|
|
||||
|
2 |
|
|
|
2 |
|
|
|
2 |
|
2 |
cos 3 |
(m3l03 ml3)] |
||||||
3(m3l03 |
ml3 ) |
2[m3l03 ml3 l2 |
|||||||||||||||||
|
2 |
2 |
|
|
|
2 |
|
|
|
3)]/2 l2 cos 2 (m3l03 ml3) |
|||||||||
|
1{(m3l03 |
|
ml3 )sin[2( 2 |
|
|||||||||||||||
sin( 2 3)} 22(m3l03 ml3)l2 sin 3 g(m3l03 ml3)
cos( 2 3) M 3.
Введем следующие обозначения:
A 1( 2, 3) J1 (m2l022 ml22 m3l22)cos2 2 (m3l032 ml32)
cos2( 2 3) 2l2(m3l03 ml3)cos 2 cos( 2 3),
B 1( 2, 3, 1, 2, 3) 1{ (m2l022 ml22 m3l22)sin2 2 2
(m3l032 ml32)sin[2( 2 3)]( 2 3) 2l2(m3l03 ml3)
[sin(2 2 3) 2 cos 2 sin( 2 3) 3},
A |
( |
) m l2 |
|
m l2 ml2 |
m l2 |
ml2 |
2cos |
l |
(m l |
03 |
ml ), |
|||||
2 |
3 |
|
2 02 |
3 2 |
2 |
|
3 03 |
3 |
|
|
3 |
2 |
3 |
3 |
||
|
|
A |
( |
) m l2 |
ml2 |
l |
cos |
3 |
(m l |
ml ), |
|
|||||
|
|
23 |
3 |
|
3 03 |
|
3 |
2 |
|
3 03 |
|
|
3 |
|
|
|
24
B 2( 2, 3 |
, 1 |
, 2, |
3) |
(2 2 3)l2 sin 3 3(m3l03 ml3) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
2 |
2 |
|
|
|
|
|
2 |
2 |
)sin[2( 2 |
3)] (1.67) |
|||||
|
1{(m2l02 m3l2 ml2 )sin(2 2) |
(m3l03 |
ml3 |
|
|||||||||||||||
|
|
|
2(m3l2l03 ml2l3)sin(2 2 3)}/2, |
|
|
|
|
|
|||||||||||
C 2( 2, 3) g(m2l02 m3l2 |
ml2)cos 2 g(m3l03 ml3) |
||||||||||||||||||
|
|
|
|
|
|
cos( 2 |
3), |
|
|
|
|
|
|
|
|
||||
A |
|
m l2 |
ml2, |
A |
32 |
( |
3 |
) m l2 ml2 l |
2 |
cos |
3 |
(m l ml), |
|||||||
3 |
3 03 |
|
3 |
|
|
|
|
3 03 |
3 |
|
|
|
|
3 03 |
|||||
|
|
|
|
|
|
|
|
2 |
|
2 |
2 |
|
|
|
|
3)]/2 |
|||
|
|
B 3( 2, 3, 1, 2) |
1{(m3l03 ml3 )sin[2( 2 |
||||||||||||||||
l2(m3l03 |
ml3)cos 2 sin( |
|
|
2 |
|
|
ml3)l2 sin 3, |
||||||||||||
2 3)} |
2(m3l03 |
||||||||||||||||||
|
|
C 3( 2, 3) g(m3l03 ml3)cos( 2 |
|
3). |
|
|
|
||||||||||||
С учетом (1.67) уравнения динамики манипулятора в угловой системе координат приобретают следующий вид:
A 1( 2, 3) 1 B 1( 2, 3 |
, 1, |
2, 3) |
М 1, |
|
||||
A 2 |
|
|
|
|
|
|
|
|
( 3) 2 |
A 23( 3) 3 B |
2( 2, 3 |
, 1, 2 |
, 3) |
|
|||
|
|
|
|
|
|
|
|
(1.68) |
|
|
С 2( 2, 3) М 2, |
|
|
|
|||
A 3 3 |
|
|
|
|
|
|||
A 32( 3) 2 B 3( 2, 3, 1, 2) С 3( 2, 3) М 3. |
||||||||
|
|
|
|
|
|
|
|
|
Векторная форма записи системы уравнений (1.68) имеет вид выражения (1.30), в котором матрицы A(q), q , P,
B(q,q) и C(q) определяются следующим образом:
|
A ( , ) |
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|||||||||
|
|
1 |
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
A(q) = |
|
A |
( |
|
) |
|
A |
|
( |
|
) |
, |
|
|
, |
P = |
M |
, |
|||||||||||||
|
|
0 |
|
3 |
|
|
3 |
|
q = |
|
2 |
|
|
2 |
|||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
0 |
|
A |
|
( |
) |
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
||
|
|
|
|
|
|
32 |
|
3 |
|
|
|
|
3 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
3 |
|
||
|
|
|
|
B 1( 2 |
|
|
|
|
|
2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
(1.69) |
||||
|
|
|
|
, 3, 1, |
3) |
|
, |
|
C(q)= |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
B(q,q)= B 2( 2 |
, 3, 1, |
|
2, 3) |
|
C 2 |
( 2, 3) . |
|
||||||||||||||||||||||||
|
|
|
|
|
B 3( 2, 3, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1, |
2) |
|
|
|
|
|
|
|
|
C 3 |
( 2, 3) |
|
||||||||||||||
Обобщенными координатами являются углы 1, 2, 3.
25
В отличие от рассмотренных ранее кинематических схем и, в частности, от схемы манипулятора, работающего в сферической системе координат, динамика которого также характеризуется наличием функциональных коэффициентов в матрице A(q), векторах B(q,q) и C(q), для данной схемы матрица
инерции A(q) не является диагональной, что свидетельствует о
влиянии ускорения по координате 2 на движение по 3, и наоборот.
Следует отметить, что независимо от кинематической схемы манипулятора его динамическая модель всегда может быть представлена в виде уравнения (1.30). На основе этого векторного уравнения строятся алгоритмы управления манипуляторами. На синтез управления также оказывают влияние модели электроприводов в сочленениях робота.
В связи с этим рассмотрим далее модели двух типов электроприводов, широко применяющихся для реализации сложных движений манипуляторов, – постоянного тока и асинхронного.
1.7. Динамические модели электроприводов промышленных роботов
Широкое распространение в регулируемых электроприводах роботов получили двигатели постоянного тока благодаря хорошим регулировочным свойствам и простоте системы управления ими. Как правило, двигатели постоянного тока управляют изменением подводимого к якорю напряжения при постоянном магнитном потоке машины. Дифференциальные уравнения, описывающие такую систему, имеют следующий вид:
Lj Ij Rj Ij ke j qд j Uj , |
|
|||
|
|
|
||
|
|
|
(1.70) |
|
|
|
|
|
|
|
|
|||
kт j Ij Jj qд j kтр qд j Mн j , |
|
|||
где Lj – индуктивность цепи якоря двигателя j-й координаты; Ij – ток якоря двигателя j-й координаты;
26

Rj – активное сопротивление цепи якоря двигателя j-й координаты;
kej – коэффициент противоЭДС двигателя j-й координаты; qдj – угол поворота вала двигателя j-й координаты;
Uj – напряжение на якоре двигателя j-й координаты; kmj – коэффициент момента двигателя j-й координаты;
J j – момент инерции якоря двигателя j-й координаты;
kтр – коэффициент вязкого трения;
Mнj – момент внешней нагрузки, приведенный к валу двигателя j-й координаты.
Первое уравнение системы (1.70) описывает электромагнитные процессы, происходящие в цепи якоря двигателя. Второе уравнение связывает электромагнитный момент двигателя, динамический момент, момент вязкого трения и момент нагрузки на валу, т. е. является основным уравнением движения электропривода j-й координаты.
В настоящее время в роботах также применяется регулируемый асинхронный электропривод. Управляемость асинхронного электропривода обеспечивается путем одновременного регулирования частоты f1 и напряжения U1 или тока I1 статорной обмотки с помощью трехфазного преобразователя частоты.
Значительная часть используемых преобразователей частоты обладает свойствами трехфазного регулируемого источника тока, т. е. формирует в фазах двигателя токи, которые не зависят от режима работы и параметров двигателя, а определяются только сигналом задания.
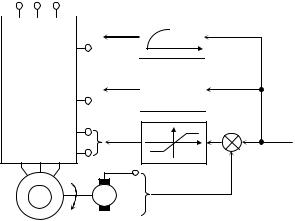
Функциональная схема системы воспроизведения момента при питании обмотки статора асинхронного двигателя токами регулируемой частоты, амплитуды и фазы показана на рис. 1.5. Схема содержит следующие элементы:
РИТ регулируемый источник тока; Μ асинхронный двигатель;
G тахогенератор;
НЗ1, НЗ2 нелинейные звенья; РМ регулятор момента.
27
U1н, f1н

 Uут
Uут 


 НЗ1
НЗ1
РИТ 
 Uуф
Uуф 

 НЗ2
НЗ2
Uуч |
РМ Uзм |
дkпс
MG
Mд 

Рис. 1.5. Схема системы воспроизведения момента [1]
На вход системы воспроизведения момента поступает сигнал задания Uзм. Сигнал управления Uуч частотой токов в обмотке статора асинхронного двигателя определяется суммой сигнала задания Uзм момента и сигнала дkпс положи-
тельной обратной связи по скорости ротора, где д – скорость двигателя, kпс – коэффициент положительной обратной связи
по скорости. Сигнал Uзм определяет также величину сигналов управления амплитудой Uут и фазой Uуф токов статора.
Тр хфазный регулируемый источник тока РИТ формирует в обмотке статора двигателя заданные токи. Система обеспечивает регулирование электромагнитного момента Мд на валу асинхронного двигателя в соответствии с сигналом задания Uзм.
Нелинейные звенья НЗ1, НЗ2 преобразуют входные сигналы в соответствии с функциональными зависимостями, для определения которых запишем уравнения динамики асинхронного двигателя в осях x, y, вращающихся со скоростью
0эл,ном относительно статора [1]:
28

|
0 = i2x R2 + d 2x |
dt – 0эл,ном sa 2y , |
|
|
0 = i2y R2 + d 2y |
dt + 0эл,ном sa 2x , |
(1.71) |
|
Мд = (рп L12 / L2) ( 2х i1y – 2у i1x), |
|
|
где i2x, |
i2y – проекции вектора приведенного тока ротора на |
||
оси x, y; |
|
|
|
R2 – приведенное активное сопротивление ротора;
2х, 2у – проекции вектора потокосцепления ротора 2 на оси x, y;
0эл,ном – электрическая угловая скорость поля двигателя при номинальной частоте f1ном токов статора;
sa=( 0эл– эл)/ 0эл,ном=( 0– )/ 0ном – абсолютное скольжение, равное отношению отклонения скорости ротора от
скорости 0 поля при текущей частоте f1 токов статора к скорости поля 0ном приноминальной частоте f1ном;
0эл – электрическая угловая скорость поля при текущей |
|||
частоте |
f1 токов статора; |
|
|
эл |
– электрическая угловая скорость ротора при текущей |
||
частоте |
f1 токов статора; |
|
|
рп – число пар полюсов; |
|
||
L12 – взаимная индуктивность между фазами статора и ро- |
|||
тора; |
|
|
|
L2 |
– собственная индуктивность фазы ротора; |
||
i1x, |
i1y – проекции вектора тока статора на оси x, y. |
||
Уравнения потокосцепления ротора |
|||
2х = L12i1x + L2i2x , |
2у = L12 i1y + L2 i2y . (1.72) |
||
|
|
|
Из условия постоянства вектора потокосцепления ротора |
||
|
|
|
при совмещении его с осью x получим 2х = 2max, 2y =0, |
||
2 |
|||||
и из уравнений (1.72) для потокосцеплений: |
|
||||
|
|
|
i2x = ( 2max – L12i1x) / L2, |
i2y = –L12i1y / L2. |
(1.73) |
Подставляя соотношения (1.73) и значения производных
от потокосцеплений d 2x dt = 0, d 2y dt = 0 в уравнения динамики (1.71), получаем
29