

Виброакустическая диагностика технических объектов
..pdfном или непрерывном режимах с помощью пьезоэлектрического преобразователя сухим контактным способом, контактным через жидкую среду или бесконтактным способом через воздушный зазор с помощью электромагнит- но-акустического преобразователя. С помощью акустических методов измеряют толщины стенок изделий, выявляют разнообразные дефекты и неоднородности структуры, определяют геометрические характеристики изделий. Эти методы имеют следующие недостатки: необходимость акустического контакта преобразователя с ОК, повышенные требования к чистоте поверхности изделия, влияние сторонних шумов на результаты измерений, воздействие температуры изделия и др. Все эти недостатки приводят к возрастанию погрешностей измерения.
Среди акустических методов можно выделить следующие:
•топографический метод, который основан на возбуждении в исследуемом изделии мощных изгибных колебаний заданной или меняющейся частоты с одновременной визуализацией картины колебаний контролируемой поверхности путем нанесения на нее тонкодисперсного порошка;
•импульсный эхо-метод, основанный на посылке коротких ультразвуковых импульсов и отражении их от поверхности дефекта; теневой метод, связанный с появлением области «звуковой тени» за дефектом, поперечные размеры которого превышают длину упругой волны;
•резонансный метод, в основу реализации которого положено явление возникновения в исследуемом материале стоячих продольных или сдвиговых волн;
•импедансный метод, основанный на установлении зависимости силы реакции изделия на контактирующий с ним колеблющийся стержень (преобразователь);
•метод акустической эмиссии, основанный на регистрации упругих волн ультразвукового диапазона, скачкообразно появляющихся при перестройке структуры материала, возникновении трещин, аллотропических превращениях в кристаллической решетке;
•электромагнитно-акустический метод, основанный на возбуждении ультразвуковых колебаний в результате взаимодействия переменного и постоянного магнитных полей с металлом или ферромагнетиком.
Вибрационный метод НК основан на оценке степени опасности повреждений по данным уровня контроля вибраций – механических колебаний конструктивных элементов и узлов объекта в процессе его функционирования. Этот метод один из наиболее эффективных методов повышения надежности оборудования.
Неразрушающий контроль методом проникающих веществ основан на явлении капиллярного проникновения хорошо смачивающих пробных веществ (жидкости) в полость дефектов объема контроля. Его делят на методы капилляр-
21
ные и течеискания. Капиллярные методы основаны на капиллярном проникновении в полость дефекта индикаторной жидкости (керосина, скипидара и др.), хорошо смачивающей материал объекта. Их применяют для обнаружения слабо видимых или невидимых невооруженным глазом поверхностных дефектов.
Методы течеискания используют для выявления только сквозных дефектов в перегородках. В полость дефекта пробное вещество проникает либо под действием разности давлений, либо под действием капиллярных сил однако в последнем случае нанесение и индикацию пробных веществ выполняют по разные стороны перегородки. Метод требует значительных временных затрат на пропитку и проявление индикаторной жидкости, что приводит к снижению производительности контроля и сложности его автоматизации.
Оставшиеся нерассмотренными три метода контроля – электрический, магнитный и вихретоковый, согласно ГОСТ 18353–79 «Контроль неразрушающий. Классификация видов и методов», объединены в электромагнитный неразрушающий контроль. Все эти методы основаны на регистрации взаимодействия электрических, магнитных и электромагнитных полей с объектами контроля либо на измерении электрических и магнитных характеристик ОК. Поэтому в физических принципах, да и в технических реализациях перечисленных видов неразрушающего контроля много общего.
Магнитный НК основан на анализе взаимодействия магнитного поля с контролируемым объектом. Как правило, его применяют для контроля объектов из ферромагнитных материалов. По характеру взаимодействия физического поля с объектом этот вид контроля не дифференцируют: во всех случаях используют намагничивание объекта и измеряют параметры, используемые при контроле магнитными методами. Процесс намагничивания и перемагничивания ферромагнитного материала сопровождается возникновением гистерезиса. Химический состав, структура, наличие несплошностей и другие свойства, которые требуется контролировать, обычно связаны с параметрами процесса намагничивания и петлей гистерезиса.
Магнитные методы применяют для измерения толщины неферромагнитного покрытия на ферромагнитном основании; для дефектоскопии поверхностных и подповерхностных участков ферромагнитных материалов (магнитопорошковый метод); для получения информации о магнитной проницаемости и ее изменении в зависимости от напряженности магнитного поля (индуктивный метод).
В общем случае при намагничивании объекта контроля, вблизи поверхности которого имеется несплошность (дефект), в области дефекта возникают пространственные аномалии напряженности магнитного поля. Появляются поля рассеяния. Изменение напряженности магнитного поля, точнее градиента напряженности, используют как первичный информационный параметр для выявления дефектов.
22
Электрический НК основан на регистрации параметров электрического поля, взаимодействующего с контролируемым объектом (собственно электрический метод), или поля, возникающего в контролируемом объекте в результате внешнего воздействия (термоэлектрический метод). Применяется для контроля диэлектрических и проводящих материалов. Методы электрического контроля (электростатический порошковый, термоэлектрический, электроискровой, электрического потенциала, емкостной) позволяют определять дефекты различных материалов, измерять толщины стенок, покрытий и слоев, сортировать металлы по маркам, контролировать диэлектрические или полупроводниковые материалы. Недостатками перечисленных методов электрического НК являются: необходимость контакта с объектом контроля, жесткие требования к чистоте поверхности изделия, трудности автоматизации процесса измерения и зависимость результатов измерения от состояния окружающей среды.
Вихретоковый НК основан на анализе взаимодействия электромагнитного поля вихретокового преобразователя с электромагнитным полем вихревых токов, наводимых в контролируемом объекте. В этом методе используется эффект воздействия вихревых токов, возбуждаемых в проводящем образце, на электрические параметры преобразователя. Его применяют только для контроля изделий из электропроводящих материалов. Вихревые токи возбуждают в объекте с помощью преобразователя в виде катушки индуктивности, питаемой переменным или импульсным током. Приемным преобразователем (измерителем) служит та же или другая катушка.
Интенсивность и распределение вихревых токов в объекте зависят от его геометрических размеров, электрических и магнитных свойств материала, от наличия в материале нарушений сплошности, взаимного расположения преобразователя и объекта, т.е. от многих параметров.
К числу главных достоинств вихретокового метода следует отнести его универсальность и широкие функциональные возможности, которые до настоящего времени еще не до конца использованы. В то же время применение этого метода затрудняется тем, что при контроле одного параметра другие параметры мешают. Для разделения параметров используют раздельное или совместное измерение фазы, частоты и амплитуды сигнала измерительного преобразователя, подмагничивание изделия постоянным магнитным полем. Контроль ведут одновременно на нескольких частотах. Применяют спектральный анализ. Получаемые таким образом выходные параметры преобразователя одновременно несут информацию об удельной электрической проводимости и магнитной проницаемости материала, о состоянии поверхности изделия и наличии дефектов, о величине зазора между изделием и преобразователем, а также о геометрических размерах изделия. Анализ измеренных параметров позволяет определять геометрические размеры изделий (толщину
23
стенки при одностороннем доступе), оценивать химический состав, структуру материала изделия, внутренние напряжения, обнаруживать поверхностные и подповерхностные (на глубине в нескольких миллиметрах) дефекты.
Контроль вихревыми токами выполняют без непосредственного контакта преобразователей с объектом. Это позволяет вести контроль при взаимном перемещении преобразователя и объекта с большой скоростью (до 60 м/с) и облегчает тем самым автоматизацию контроля.
Сопоставление методов неразрушающего контроля между собой нужно проводить с учетом следующих обстоятельств. Во-первых, многие из описанных выше методов НК применимы для контроля только определенных типов материалов:
•радиоволновой – для неметаллических, плохо проводящих ток мате-
риалов;
•вихретоковый – для хороших проводников электрического тока;
•магнитный – для ферромагнетиков;
•акустический – для материалов, обладающих небольшим затуханием звуковых волн соответствующей частоты;
•оптический – для объемного контроля прозрачных в световом диапазоне ОК.
Во-вторых, следует иметь в виду различия в модификации методов
взависимости от их предназначения: измерение геометрических размеров, исследование химического состава и структуры, поиск объемных или поверхностных дефектов и т.д. Поэтому решение об использовании того или иного метода НК необходимо принимать с учетом всех факторов, действующих при производстве или исследовании ОК.
2.ОБЩИЕ СВЕДЕНИЯ О ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКЕ
2.1. Объект как колебательная система
Волновые процессы, формирующиеся в объекте, связаны с различными видами силового воздействия на элементы, узлы объекта [1]. Вид и характер силового взаимодействия порождает в конструктивных элементах объекта различного вида деформации. Те в свою очередь порождают вибрационные и акустические волны, которые могут приводить к вибрационным нагрузкам в соседних элементах конструкции, создавая виброакустическое поле объекта. Для изучения структуры колебательных процессов в объекте необходимо рассмотреть его физическую и математическую модели. Как правило, в виде физической модели чаще используют n-мерную модель, для которой все элементы рассматриваются как материальные точки с массами, равными эле-
24
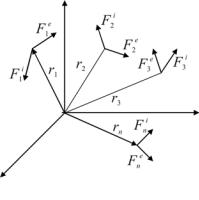
ментам объекта, и всеми связями и силами, приложенными к материальным точкам. Математическое описание колебательной системы представлено на рис. 2.1.
Уравнение движения каждой из точек описывается зависимостью
m W = F e + F i + R . |
(2.1) |
||
i i i |
i |
i |
|
Система уравнений незамкнута – содержит неизвестные реакции связей. При идеальной связи на систему наложено количество S связей, уравнение которых имеет вид
fk (r1,r2 ,...,rn ,t) , |
(2.2) |
системасодержит 3N + S неизвестных. |
|
Для замыкания введен |
вектор |
количества движения |
|
N |
|
Q = ∑miVi , |
(2.3) |
i=1
Рис. 2.1. Система материальных точек;
здесь F e – внешние силы; Fi |
– внут- |
ренние силы; ∑Fi = −∑F e : |
R – |
реакция связей |
|
кинетический момент (аксиальный вектор)
|
N |
|
|
||
K = ∑(ri miVi ), |
(2.4) |
||||
|
j=1 |
|
|
||
главный момент количества движения или кинетический момент |
|
||||
|
1 |
N |
|
|
|
T = |
∑miVi |
2 , |
(2.5) |
||
|
|||||
|
2 i=1 |
|
|
||
кинетическая энергия системы |
|
|
|||
N |
|
|
|||
dT = ∑(Fie + Fii + Ri )dr. |
(2.6) |
||||
i=1 |
|
|
|||
Изменения кинетической энергии системы связи идеальны: |
|
||||
N |
|
|
|||
∑(Fie + Fii ) = −dU , |
(2.7) |
||||
i=1 |
|
|
|||
где U – потенциальная энергия системы, |
|
|
|||
E = T +U = const. |
(2.8) |
||||
|
|
|
|
25 |
|
Согласно принципу Д’Аламбера уравнения колебаний n-мерной механической системы формально совпадает с уравнениями равновесия этой системы, если к действующим внешним силам, внутренним силам и реакциям связи добавить фиксированные (даламберовы) силы инерции (т.е. переход
системы из динамической в статическую) Ii |
= −miWi . С учетом этого уравне- |
||
ние равновесия имеет вид Fie + Fii + Ri |
+ Ii |
= 0, общее уравнение динамики |
|
Д’Аламбера – Эйлера будет иметь вид |
|
|
|
N |
+ Ii ) δr = 0 . |
|
|
∑(Fie + Fii + Ri |
(2.9) |
||
i=1 |
|
|
|
Колебательное движение происходит независимо от времени и будет |
|||
описываться следующей системой уравнений: |
|
||
{М}[ А]+ {L}[V ]+ {C}[ Х] = [Q] , |
(2.10) |
||
где {M} , {L} , {C} – симметричные матрицы n × n коэффициентов инерции,
демпфирования и жесткости механической системы [A], [V ], [ X ], [Q] – стол-
бец-матрицы ускорений, скорости, перемещений и действующих внешних сил. Ускорение, скорость и перемещение связаны между собой определенной зависимостью. Для решения уравнения (2.10) необходимо задаться определенным видом колебательного процесса.
2.2. Механические колебательные системы
2.2.1. Простейшее гармоническое колебание
Процессы, в которых какая-либо физическая величина периодически изменяется во времени, называют колебаниями [6, 11]. Время одного цикла изменений является периодом колебания T, а величина, обратная периоду, – частотой f = 1/T.
Период колебаний (T) – это интервал времени, который необходим для завершения одного цикла колебания. В зависимости от быстроты колебаний период измеряют в секундах, миллисекундах, микросекундах и т.д.
Частота колебаний (f = 1/T) – величина, обратная периоду, определяет количество циклов колебания за период и измеряется в герцах (1 Гц = с–1). Для роторных машин частота основного колебания соответствует частоте вращения, измеряемой в оборотах в минуту (об/мин) и определяется как n = f ·60, где f – частота, Гц; 1 минута (мин) – это60 секунд (с).
Для описания и измерения механических вибраций используются следующие понятия (рис. 2.2 и 2.3).
26
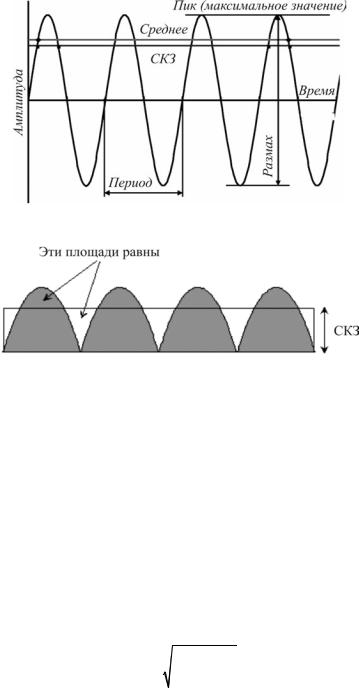
Рис. 2.2. Параметры временной реализации
Рис. 2.3. Среднеквадратическое значение амплитуды
Максимальная амплитуда (пик) – это максимальное отклонение от нулевой точки, или от положения равновесия.
Размах (пик–пик) – это разность между амплитудами положительного
иотрицательного пиков. Для синусоидального колебания размах в точности равен удвоенной пиковой амплитуде, так как временная реализация в этом случае симметрична. Однако в общем случае это неверно для полигармонического, случайного процессов и их смеси.
Среднеквадратическое значение амплитуды (СКЗ) равно квадратному корню из среднего квадрата амплитуды колебания, т.е. для расчета СКЗ необходимо возвести в квадрат мгновенные значения амплитуды колебаний,
иусреднить получившиеся величины по времени. На практике среднеквадратическое значение определяется выражением
|
|
T |
∫ |
|
|
Х& |
СКЗ = |
1 |
Т |
x2 (t)dt , |
(2.11) |
|
0 |
||||
|
|
|
|
|
|
связь СКЗ и среднего значения с пиковым значением определяется зависимостью
27
|
|
|
|
& |
|
π |
& |
|
1 |
& |
|
||||
|
|
|
|
|
|
ХСКЗ = |
2 |
Хcp |
= |
|
|
2 |
Хп, |
(2.12) |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||
или в общей форме |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
& |
|
|
& |
|
1 |
|
& |
(2.13) |
|||
|
|
|
|
|
|
ХСКЗ = F1 |
Хcp = |
|
|
|
Хп, |
||||
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
||
где F1 = |
Х&скв |
; |
F2 |
= |
Xп |
– |
характеристики отклонения формы волн от sin, |
||||||||
|
|
||||||||||||||
|
Xcp |
|
|
Xскз |
|
|
|
|
|
|
|
|
|
||
F1 = π 2 2 = 1,11 ≈ 1дБ, F2 |
= 2 = 1,414 ≈ 3 дБ. |
|
|
||||||||||||
Для получения правильного значения интервал усреднения должен быть |
|||||||||||||||
не меньше одного периода колебания. После этого извлекается квадратный корень и получается СКЗ. Для синусоидальной волны (и только для нее) СКЗ в 1,41 раза меньше пикового значения, однако такое соотношение справедливо только для данного случая. По физической природе колеблющейся величины различают колебания механические, электрические и др. Диапазон частот механических колебаний – от инфразвуковых (10-1 Гц) до гиперзвуковых (108 Гц). Самыми простыми из существующих в природе колебательных движений являются упругие прямолинейные колебания тела на пружине (рис. 2.4). При этом простейшая колебательная система (тело, подвешенное на пружине) может быть описана набором параметров – массой тела m (предполагается, что оно не упругое) икоэффициентом жесткости пружины (упругостью пружины) k (предполагается, что онанеимеет массы).
При отсутствии сил сопротивления груз, смещенный от положения равновесия на величину x и предоставленный самому себе, будет совершать гармонические колебания по закону
x = S0 sin(ω0t + ϕ0 ), |
(2.14) |
где x – амплитуда колебания (максимальное S0 смещение от положения рав-
новесия); (ω t + ϕ0 ) – фаза колебания; |
ϕ0 – начальная фаза; t – текущее вре- |
|||
мя; ω0 – круговая (угловая) частота, |
|
|
|
|
ω = |
2π |
= 2πf , |
(2.15) |
|
Т |
||||
0 |
|
|
||
где π = 3,14592653.
28
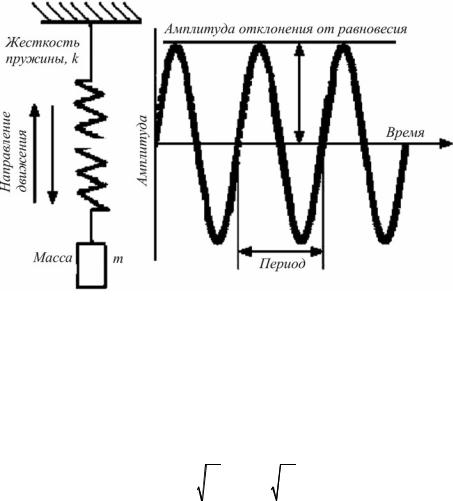
Рис. 2.4. Пример простейшего колебания
В математике функция синуса описывает зависимость отношения катета к гипотенузе от величины противолежащего угла. Синусоидальная кривая при таком подходе является графиком синуса в зависимости от величины угла. Период T0 и круговая частота ω0 собственных колебаний простейшей системы без учета сил трения (см. рис. 2.4) определяются величиной массы m и коэффициентом упругости k:
T0 |
= 2π |
m |
и ω0 = |
k |
. |
|
|
||||
|
|
k |
m |
||
Отсюда следует, что с увеличением жесткости пружины увеличивается и собственная частота, а с увеличением массы собственная частота падает.
Такая механическая система имеет одну степень свободы. Если отвести тело на некоторое расстояние от положения равновесия и отпустить, то пружина заставит тело двигаться. Тело приобретет при этом определенную кинетическую энергию, минует точку равновесия и деформирует пружину в противоположном направлении. После этого скорость тела начнет уменьшаться, пока оно не остановится в другой крайней позиции, откуда сжатая или растянутая пружина опять начнет возвращать тело в положение равновесия. Такой процесс будет повторяться, при этом происходит непрерывное перетекание энергии от тела (кинетическая энергия) к пружине (потенциальная энергия) и обратно.
29
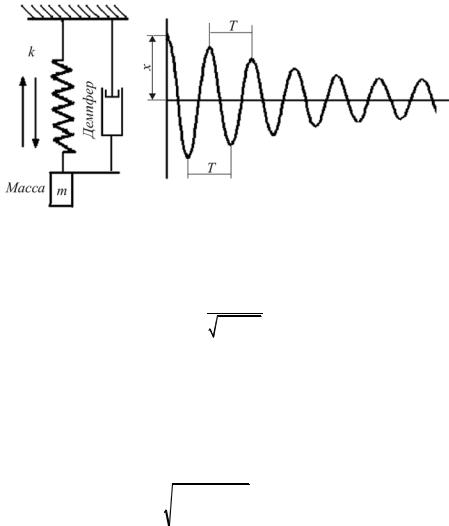
Если бы в системе отсутствовало трение, то эти колебания продолжались бы непрерывно и бесконечно долго с постоянными амплитудой и частотой. Любая реальная механическая система обладает трением (имеет демпфирование), которое приводит к постепенному затуханию амплитуды (рис. 2.5) и превращает энергию колебаний в тепло. Движение тела можно описатьуравнением
x = Ae− δt sin(ωt + ϕ0 ) , |
(2.16) |
где δ – коэффициент затухания, зависит от сил |
вязкости (трения), |
δ = / 2m = τ / 2m. Вместо δ иногда употребляют величину, обратную коэф-
фициенту затухания, которая называется постоянной времени затухания и имеет размерность времени.
Рис. 2.5. Затухающие колебания системы с демпфером
Такие колебания называются затухающими. Период затухающих колебаний величина постоянная и не зависит от начальных условий
T = |
2π |
|
ω02 − δ2 . |
(2.17) |
Он больше периода собственных колебаний при отсутствии сопротивления (демпфера). Величина изменения периода в первом приближении будет оп-
|
|
|
δ |
2 |
|
ределяться по формуле T = T0 |
1 |
+ |
|
. |
|
|
2 |
||||
|
|
|
2ω0 |
|
|
Постоянные значения |
А и |
ϕ0 |
определяются из начальных условий |
||
в следующей форме: |
|
|
|
|
|
|
|
|
& |
2 |
|
x |
|
|
|
A= x2 |
+ |
(x0 |
+δx) |
; sinϕ = |
. |
(2.18) |
|
ω02 +δ2 |
|
||||||
0 |
|
0 |
A |
|
|||
30