

Решение инженерных задач на высокопроизводительном вычислительном к
..pdfниями, деформация тел при погружении и т.п. Часто сталкиваются с возникновением колебательных режимов при отработке ракетных двигателей твердого топлива (РДТТ).
Для поиска опасных резонансных режимов в газонаполненных конструкциях предлагается новый подход на основе проведения комплексного экспериментально-теоретического исследования параметров динамического поведения системы «поток газа – конструкция».
Целью работы является разработка экспериментальной установки по моделированию резонансных режимов типа «флаттер» иреализация взаимодополняющих численного и физического моделирования колебательных процессов типа «флаттер» в экспериментальной установке.
В соответствии с поставленной целью решались следующие задачи:
–обзор литературы и анализ состояния исследований по проблемам взаимодействия деформируемой конструкции и потока газа;
–подготовка, проведение и анализ результатов газодинамических вычислительных экспериментов (ВЭ) и ВЭ по расчету частот колебаний модельной камеры экспериментальной установки;
–проектирование опытной экспериментальной установки, конструкция которой должна обеспечивать выполнение условий резонансного взаимодействия потока газа с деформируемой конструкцией;
–подготовка, проведение и анализ результатов физических экспериментов на опытной экспериментальной установке;
–разработка методики проведения физических экспериментов на опытной экспериментальной установке;
–модификация опытной экспериментальной установки для расчета гидроупругих взаимодействий.
Моделирование течения газа для принятой модели проточной части экспериментальной установки выполнялось в программном комплексе FlowVision.
21
Сформулирована следующая физическая модель:
–процессы рассматриваются в трехмерной динамической постановке;
–в качестве рабочего тела выбран воздух;
–стенки модельной камеры непроницаемые, нетеплопро-
водные;
–в начальный момент времени модельная камера заполнена воздухом, значение давления для первого варианта равно 0,3 МПа, длявторого варианта – 0,1 МПа, температура воздуха293 К.
Выбранная математическая модель включает в себя следующие соотношения: закон сохранения массы, закон сохранения импульса, закон сохранения энергии, уравнение состояния. При-
нята стандартная k-ε -модель турбулентности.
Математическая модель замыкается начальными и граничными условиями. При описании границ использованы следующие типы граничных условий:
– «Стенка ». Вектор скорости представлен в приграничной ячейке в виде суммы двух векторов V = Vn +Vτ ;
–«Свободный выход». Избыточное давление на границе области полагается равным нулю. Скорость на границе расчетной области устанавливается по следующему правилу: в расчетной ячейке, примыкающей к границе, определяется направление вектора скорости. Если вектор скорости направлен внутрь расчетной области, то нормальная составляющая скорости обнуляется. Если вектор скорости направлен из расчетной области, то устанавливаются нормальные производные компонент вектора скорости, равные нулю;
–«Вход /Выход». На границе области задается давление. Геометрия расчетной области для данной задачи была
спроектирована в инженерном пакете «Компас 3D». Было предусмотрено два возможных варианта возбуждений колебаний воздуха в экспериментальной установке: при резком открытии штуцера для отвода рабочего тела и при работе акустического
22
динамика в диапазоне частот 0–1000 Гц. При моделировании колебаний, возникающих при работе динамика, использовался фильтр «Движущееся тело».
Для решения поставленной задачи была задана расчетная сетка из 93750 ячеек. При моделировании колебаний, возникающих при работе динамика, вблизи него проводилось дополнительное сгущение сетки. Шаг по времени был задан величи-
ной 1·10–4 с.
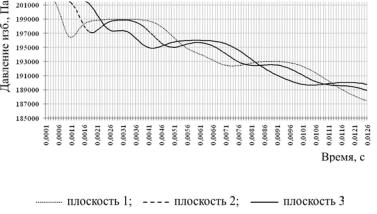
Полученные для варианта 1 результаты вычислительного эксперимента показывают, что наблюдаются переходные процессы, но колебания возникают только в начальный момент времени
(рис. 2.1, 2.2).
Возмущение в плоскость 1 приходит в момент времени t = 0,0007 с. В интервале 0,0007 с < t < 0,0015 с избыточное давление (далее – давление ) уменьшается и достигает значения 191266 Па. Затем давление в плоскости 1 не меняется. Это связано с тем, что волна разряжения, движущаяся со скоростью звука (330 м/с), достигает задней стенки, отражается от нее и возвращается в плоскость 1. Затем волна достигает передней стенки, и процесс повторяется с учетом потерь при отражениях. Номинальный уровень давления постепенно уменьшается.
Рис. 2.1. Изменение избыточного давления (вариант 1):
23
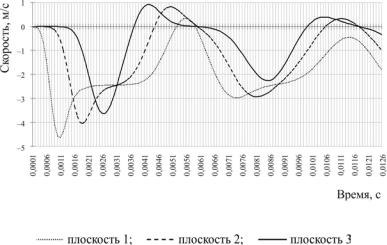
Рис. 2.2. Изменение скорости вдоль оси камеры (вариант 1):
В плоскость 2 возмущение приходит в момент времени t = 0,0015 с, в плоскость 3 – в момент времени t = 0,0022 с. Характер изменения давления в плоскости 1,2 и 3 совпадает, однако амплитуда колебаний в плоскости 2 меньше (рис. 2.3).
Постепенно процесс стабилизируется, и устанавливается номинальный уровень давления. Переходный процесс занимает около 0,3 с. Таким образом, показано, что колебания в модельной камере не поддерживаются.
Рассмотрим результаты вычислительного эксперимента для варианта 2.
Уровнеграмма, представленная на рис. 2.4, показывает, что наблюдаются колебания давления в модельной камере. Колебательный процесс показан развернутым на интервале време-
ни от 0 до 0,0126 с.
Кривая, соответствующая изменению избыточного давления в плоскости 1 (далее – кривая 1) до момента времени t = = 0,0007 с, близка к нулю. Это соответствует времени, за которое волна возмущения от динамика добегает до плоскости 1. Для кривой 2 время ожидания больше и составляет t = 0,0015 с, для кривой 3 – t = 0,0022 с.
24
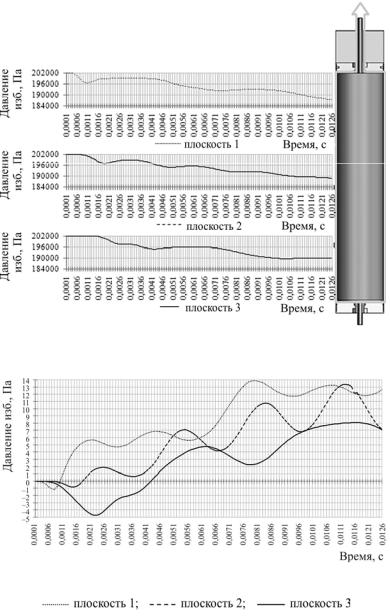
Рис. 2.3. Визуализация колебательного режима (вариант 1)
Рис. 2.4. Изменение избыточного давления (вариант 2):
25
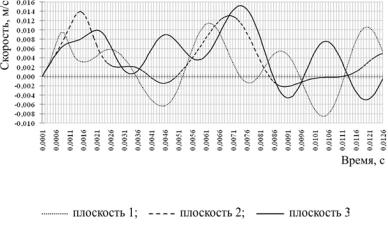
На рис. 2.5 представлено изменение скорости вдоль оси камеры. По данным уровнеграммам можно определить периоды, частоты и амплитуды колебаний воздуха в различных сечениях.
Рис. 2.5. Изменение скорости вдоль оси камеры (вариант 2):
Затем следует интервал времени, на котором наблюдается подъем давления. Для кривой 1 – это0,0007 с < t < 0,0021 с, для кри-
вой2 – 0,0015 с< t < 0,0027 с, длякривой3 – 0,0022 с< t < 0,0063 с.
Далее, по рис. 2.3, наблюдаем во всех трех плоскостях неодновременный спад давления. Для кривой 1 – 0,0021 с < t < 0,0033 с, для кривой 2 – 0,0027 с < t < 0,0039 с, для кривой 3 –
0,0063 с < t < 0,0078 с.
Постепенно процесс стабилизируется, и устанавливаются колебания с постоянной амплитудой.
Для определения параметров колебаний воздуха рассмотрим установившийся колебательный режим. На рис. 2.6 процесс представлен в интервале времени от 0,1215 до 0,1365 с. Период колебаний воздуха во всех сечениях одинаков и составляет 0,003 с. Следовательно, частота колебаний воздуха в модельной камере – 330 Гц. Амплитуда давления тем меньше, чем больше расстояние от динамика. Например, в плоскости 1, расположенной на расстоянии 0,25 м от динамика, ее среднее значение составляет 3,5 Па;
26
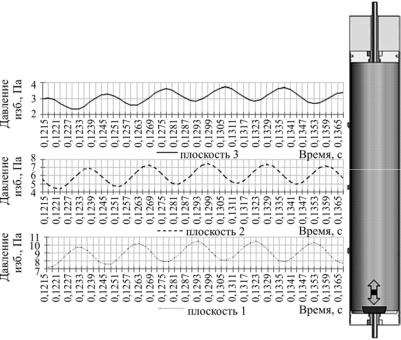
вплоскости 2, удаленной от поршня на 0,5 м – 3,0 Па; в плоскости 3, расположенной еще дальшеотпоршня – 1,0 Па.
Колебания в плоскости 1 примем за начальные. Тогда колебания в плоскости 2 запаздывают на 0,0075 с, в плоскости 3 –
0,0015 с.
Расчет собственных частот конструкции модельной камеры экспериментальной установки выполнялся в инженерном пакете ANSYS Workbench [2]. Сформулирована следующая физическая модель: волновые процессы в конструкции рассматриваются в трехмерной постановке; исследуется модельная камера, заданная базовым вариантом физико-механических характеристик и геометрических параметров конструкции; материал модельной камеры – упругий, однородный.
Рис. 2.6. Визуализация установившегося колебательного режима
27
Модальный анализ позволяет определить собственные частоты и формы колебаний конструкции и является важной составной частью динамического анализа. Результаты анализа дают возможность установить число форм колебаний и шаг интегрирования по времени, что может обеспечить надежное решение задачи одинамическом поведении системы внеустановившемся режиме.
Для проведения модального анализа в программе ANSYS реализовано несколько методов. Наилучших результатов можно добиться, применяя метод Ланцоша и метод подпространств.
Анализ гармонического воздействия используется для определения параметров установившегося движения линейной системы при синусоидальном силовом возбуждении. Этот вид анализа актуален при исследовании влияния нагрузок, меняющихся во времени по гармоническому закону.
Разрешающее уравнение для этого вида анализа представляет собой специальный случай общего уравнения движения, в котором вынуждающая сила F (t) является синусоидальной функцией времени с известной амплитудой F0, частотой ω и фазовым углом φ:
F (t) = F0 (cos (ω t+ φ) + i sin (ω t+ φ).
Перемещения меняются синусоидально с частотой ω, но не обязаны совпадать по фазе с вынуждающей силой. Нагрузки могут быть в форме узловых сил, начальных перемещений или распределенными по элементу. Для заданной частоты пользователь имеет возможность найти перемещения либо в виде набора амплитуд ифазовыхуглов, либов виде реальной имнимой частей решения.
Для проведения гармонического анализа доступны три метода: полный, редуцированный и метод суперпозиций.
В анализе свободных вибраций не задаются конструкционные и тепловые нагрузки. Можно задавать закрепление конструкции. Для моделирования крепления модельной камеры используется фиксированное закрепление – Fixed Support (жесткая заделка). При гармоническом анализе к торцу модельной каме-
28
ры приложим циклические перемещения (Displacement). Амплитудное значение принято равным 1 мкм.
Рассматриваемая конструкция модельной камеры является трехмерным телом (Solid Bodies). Твердотельная модель камеры экспериментальной установки была спроектирована в приложении Design Modeler, предназначенном для подготовки геометрии к анализу.
Сетка генерируется на твердотельной модели и является основой для составления и решения системы уравнений в матричном виде. Для проверки сходимости решения было сгенерировано несколько конечно-элементных сеточных моделей и произведен расчет НДС конструкции под действием собственной массы. Считалось, что решение сходится, если результаты расчетов отличаются менее чем на 5 %. По полученным данным сходимость решения, удовлетворяющая требованиям к точности, была получена при факторе плотности 25. При дальнейшем увеличении числа гексаэдральных конечных элементов результаты расчета изменялись не более чем на 5 %.
Задавались настройки анализа: количество расчетных мод Max Modes to Find – 20; интервал поиска собственных частот от 0 до 100 МГц. Опция «Iterative» означает использование динамических методов, а именно– подпространственного метода извле-
чения собственных значений (subspace eigenvalue extraction method) и решателя PCG. В настройках анализа определяли следующие дополнительные параметры: Range Minimum – 0 Гц; Range Maximum – 1000 Гц ; Solution Intervals (Интервал решения) – 10;
Constant Damping Ration (Коэффициент демпфирования) – 0.2. Для проведения гармонического анализа установим Solution
Method (Метод решения) – Full (Полный). При выполнении модального анализа во вкладке решений появляется диаграмма и таблицасвычисленными значениями собственных частот (рис. 2.7).
При вычислении мод расчетные параметры – напряжения, деформации – вычисляются относительными, поскольку не задается возбуждение конструкции внешними силами.
29
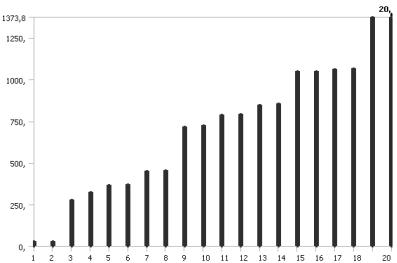
Рис. 2.7. Вычисленные значения собственных частот
Для каждой вычисленной собственной частоты можно запросить просмотр соответствующей формы колебаний. Просматривая формы и частоты собственных колебаний, можно прогнозировать динамический отклик конструкции на внешнее возбуждение
вразличных направлениях. По результатам расчета продольные колебания конструкции возникают при частоте 325 Гц, что близко кзначению, полученному аналитическим методом.
При выполнении гармонического анализа строится ампли- тудно-частотная характеристика – Frequency Response. В качестве параметра выберем значения перемещений по оси Х, так как в этом направлении была приложена нагрузка.
По графику (рис. 2.8) видно, что максимальная амплитуда перемещений наблюдается при частоте приложения нагрузки
винтервале 250–375 Гц. При уточненном расчете (рис. 2.9) максимальная амплитуда перемещений наблюдается при частоте приложения нагрузки 330 Гц. Возникает условие резонансного взаимодействия.
30