

2836.Труды IX Международной (XX Всероссийской) конференции по автоматизирова
..pdfРис. 11. Замкнутая САР скорости линейного асинхронного двигателя |
|
Рис. 12. Токи ixб и ix oc на входе фильтров ФЗТ и ФОТ |
|
||||
400 |
|
|
|
|
|
|
200 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
-200 |
|
|
|
|
|
|
-4000 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
|
Рис. 13. Напряжения uα, uβ на выходе преобразователя |
|
||||
|
|
координат (x, y → α, β) |
|
|
||
400 |
|
|
|
|
|
|
200 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
-200 |
|
|
|
|
|
|
-4000 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
Рис. 14. Напряжения Ua, Ub, Uc на выходе преобразователя |
|
|||||
|
|
координат (α, β → a, b, c) |
|
|
||
15 |
|
|
|
|
|
|
10 |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
-5 |
|
|
|
|
|
|
-10 |
|
|
|
|
|
|
-150 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
|
Рис. 15. Токи iа, ib, ic на выходе ЛАД |
|
|
|||
15 |
|
|
|
|
|
|
10 |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
-5 |
|
|
|
|
|
|
-10 |
|
|
|
|
|
|
-150 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
|
Рис. 16. Токи iα, iβ на выходе преобразователя |
|
||||
|
|
|
(a, b, c → α, β) |
|
|
|
Рис. 17. Токи ix ос, iy ос на выходе прямого преобразователя координат
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 151 -
|
Библиографический список |
1. |
Исследование электромеханических переходных процессов ли- |
|
нейного асинхронного короткозамкнутого двигателя / Ф.Н. Сара- |
|
пулов, А.А. Емельянов, С.В. Иваницкий, М.Г. Резин // Электри- |
|
чество. 1982. № 10. С. 54–57. |
2. |
Программирование линейного асинхронного двигателя (Z1 = 6) |
|
с трехфазной обмоткой индуктора с нулевым проводом / |
|
А.А. Емельянов, А.В. Кобзев, А.М. Козлов, В.В. Бесклеткин, |
|
Ю.П. Бочкарев, А.С. Авдеев, Г.А. Киряков, М.В. Чернов, Э.Ф. Га- |
|
бзалилов, А.Ю. Иванин // Молодой ученый. 2014. № 2. С. 36–51. |
3. |
Шрейнер Р.Т. Математическое моделирование электроприводов |
|
переменного тока с полупроводниковыми преобразователями |
|
частоты. Екатеринбург: Изд-во УРО РАН, 2000. 654 с. |
4. |
Шрейнер Р.Т., Емельянов А.А., Медведев А.В. Оптимизация |
|
перемежающихся режимов работы частотно-регулируемого |
|
асинхронного электропривода // Изв. ТулГУ. Технические науки. |
|
Вып. 3: в 5 ч. Тула: Изд-во ТулГУ, 2010. Ч 4. 262 с. |
5. |
Шрейнер Р.Т., Емельянов А.А., Медведев А.В. Ресурсы энерго- |
|
сбережения в повторно-кратковременных режимах работы |
Рис. 18. График скорости и момента в замкнутой системе |
асинхронного привода // Промышленная энергетика. 2011. № 11. |
С. 22–27. |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 152 -
УДК 621.3.07
Структурные особенности реализации вентильного электропривода и его работы в режиме БМПТ
В.М. Иванов, В.Н. Дмитриев, А.О. Холявко
Ульяновский государственный технический университет, Ульяновск, Россия
Structural features of realization
the valve drive and its work in mode BLDC
V.M. Ivanov, V.N. Dmitriev, A.О. Holjavko
Ulyanovsk state technical university,
Ulyanovsk, Russian Federation
Дано математическое описание вентильного электропривода, основные особенности которого связаны с представлением датчика положения и коммутатора как квантователя информациипоуровню. Рассмотреныпринципыреализации следящего электропривода, соответствующие работе ВД как обращенной машины постоянного тока. Приведены результаты моделирования электропривода вразличных режимах и их анализ. Даны рекомендации по структурным особенностям реализации систем управления БДПТ и сопоставление ссистемамивекторногоуправления.
The mathematical description of valve drive (VD) in the rotor (d, q) system of coordinates allows to establish conditions representing VD as a structure similar to direct-current motor (DCmotor). Vector control systems of the valve actuator ensure its functioning in a wide range of speeds and are used in precision mechanisms. However, the mathematical model describing system of rotating coordinates defines increased requirements of effective control system. Moreover, this principle assumes a withdrawal from the discrete character of switching and establishment of sine-wave voltage and currents in the motor winding.
It is important to note, that the mathematical model of rotating coordinates does not allow an unequivocal description of the specified structural representations to define the management valve drive as reversed DC motor. Firstly it is defined by duality of the processes and presence of the commutator functioning as collector, and secondly by the rotor position sensor (RPS) functions of coordinates converter.
Therefore, the adequate estimation of valve drive properties requires models and structures considering discrete switching and nonlinear properties of regulation object.
Ключевые слова: вентильный электропривод, синхронная машина, обращенная машина постоянного тока, ПИДрегулятор, программный задатчик угла и скорости.
Keywords: servo drive, synchronous machine, reverse DC machine, BLDC, PID regulator, program speed and angle setting device.
ВВЕДЕНИЕ
Вентильный электропривод в настоящее время широко используется в приводах металлорежущих станков, робототехнических системах и является одним из основных узлов многих агрегатов и комплексов, используемых для автоматизации технологических процессов.
Вентильный двигатель (ВД) представляет собой электромехатронную систему, в которой объединены синхронная машина (СМ) с возбуждением от постоянных магнитов, датчик положения ротора (ДПР) и электронный коммутатор обмоток статора, управление которым осуществляется в функции угла поворота. В зависимости от конструктивного исполнения [1, 2] различают два основных типа вентильного двигателя: BLDC (Brushless Direct Current Motor), обмотки стато-
ра которого выполняются с насыщением для снижения пульсаций тока при применении трапецеидальной коммутации; PMSM (Permanent Magnet Synchronous Motors), обмотки которого выполняются без насыщения для формирования кругового потокосцепления статора с ротором. Многообразие сфер применения и конструктивных особенностей ВД определило ряд способов управления и регулирования частоты, в том числе, в режиме бесконтактного двигателя постоянного тока (БДПТ).
Однако, несмотря на большой объем отечественной и зарубежной литературы [3, 4, 5], режимы работы БДПТ до сих пор недостаточно изучены, не исследовано влияние способов управления и угловых параметров на характеристики привода, отсутствует удобная для инженерных расчетов линеаризованная передаточная функция двигателя, нет четких рекомендации по вопросам синтеза замкнутых систем автоматического регулирования.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 153 -
Необходимо отметить, что в векторных системах управления описание ВД в системе вращающихся координат (d, q) требует дополнительных средств преоб-
разования координат, необходимых для реализации системы управления, что не позволяет однозначно использовать указанные структурные представления для обоснования управления ВД как обращенной машины постоянного тока. Это прежде всего связано с двойственностью процессов, наличием коммутатора, который, с одной стороны, выполняет функции коллектора, а с другой стороны, совместно с ДПР функции преобразователя координат.
I. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ВД
Режим работы ВД существенно отличается от СМ, питаемой от преобразователя частоты с внешним управлением, в котором выходная частота тока (напряжения) задается принудительно. Основное отличие привода с ВД заключается в том, что переключение питания обмоток осуществляется в функции угла поворота ротора. Селективное переключение обмоток ВД по сигналам ДПР соответствует преобразованию питающего напряжения (тока) в частоту и фазу ротора, благодаря чему в ВД невозможен асинхронный режим, когда частота ЭДС вращения СМ не совпадает с частотой источника питания. Если не принимать во внимание особенности систем управления, то вентильный двигатель можно рассматривать как автокоммутируемыйшаговыйдвигатель.
Режим автокоммутации– основная особенность ВД, которая определяет режим бесконтактной машины постоянного тока (БМПТ). Привод с ВД в режиме БМПТ позволяет исключить пропуск шага и увеличить быстродействиепосравнениюсразомкнутымшаговымприводом.
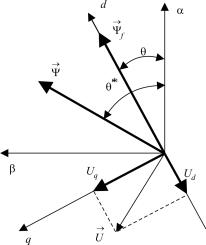
Рассмотрим математическую модель работы ВД в пределах шага коммутации. В шаговом режиме рабо-
→
ты изменение потокосцепления статора Ψ на угол θ* осуществляется за счет коммутации очередной обмотки (рис. 1). Если пренебречь активным сопротивление об-
Рис. 1. Векторная диаграмма ВД при отработке шага
→
мотки статора [8], то вектор напряжения U опережает
вектор |
|
→ |
на угол |
π/ 2 . |
потокосцепления статора Ψ |
||||
В установившемся режиме |
вектор |
потокосцепления |
||
ротора |
→ |
θ = θ* − θ, где θ – |
угол |
|
Ψ f отстает на угол |
||||
поворота ротора. Проекции модуля вектора напряжения на оси вращающейся системы координат ротора(d, q)
определяются выражениями
Ud |
= −U sin(θ* − θ) , |
(1) |
Uq |
= U cos(θ* − θ) . |
(2) |
Для двигателей с постоянными магнитами собственная индуктивность фазы и взаимоиндуктивность между фазами благодаря низкому значению магнитной проницаемости материала магнита мало зависит от углового положения ротора даже при явно полюсной конструкции. Поэтому можно принять их равными средним значениям. Можно пренебречь также наведением токов в теле ротора, так как материал магнита имеет высокое удельное сопротивление. Как показано вработе [6], уравнения электромагнитных процессов такойэлектрическоймашинымогутбытьзаписаныввиде
|
Ud |
= R Id + p Ψd − ωo Ψq ; |
|
(3) |
|
Uq |
= R Iq + p Ψ q + ωo Ψ d ; |
|
(4) |
|
|
Ψd = Ld Id + Ψ f ; |
|
(5) |
|
|
Ψq = Lq Iq , |
|
(6) |
где |
R – сопротивление фазы обмотки |
статора; |
Ld , |
|
Lq |
– индуктивности обмоток статора по осям d , |
q ; |
||
ωo |
= pnω – частота ЭДС вращения; ω – |
частота вра- |
||
щения ротора; pn |
– число пар полюсов. |
|
|
|
Электромагнитный момент для трехфазной машины через составляющие потокосцепления и тока статора
M = (3 / 2) pn (Ψd Iq − Ψq I d ) . |
(7) |
Уравнение механики с учетом потерь может быть записано в виде
|
ω = |
1 |
(M − Mc − d ω) , |
(8) |
|
|
|||
|
|
Jp |
|
|
где J – |
момент инерции; Mс – момент статической |
|||
нагрузки; |
d – коэффициент, учитывающий дополни- |
|||
тельный момент демпфирования.
Разрешая уравнения (3) и (4) относительно токов и учитывая, что pΨ f = 0, получим
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 154 -
Id = (Ud + ωo Ψq ) |
|
1/ R |
; |
(9) |
|
|
|
|
|||
Td p + 1 |
|||||
Iq = (U − ωoΨd ) |
1/ R |
, |
(10) |
||
|
|
||||
T p + 1 |
|||||
|
|
q |
|
|
|
где Td = Ld / R , Tq = Lq / R – постоянные времени статорных обмоток, приведенные к осям d , q ротора.
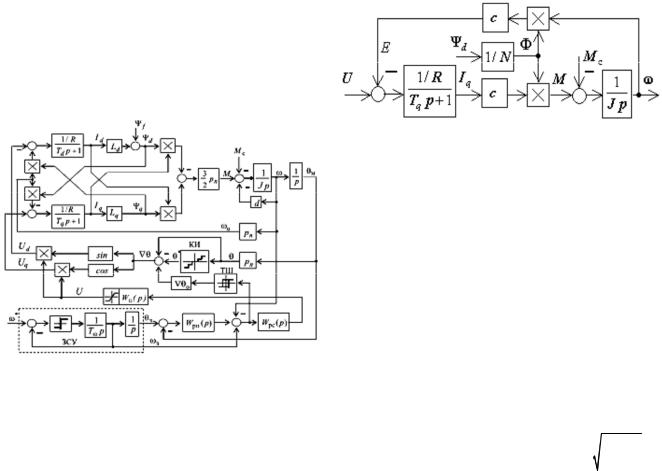
Регулируемый электропривод на базе ВД может быть реализован только как система с обратными связями. При разработке структуры следящего электропривода (рис. 2) в качестве основных приняты два контура: контур положения с регулятором положения Wрп ( p) , кон-
тур скорости с регулятором скорости Wрс ( p) . Основная
структурная схема ВД соответствует исходным уравнениям (5)–(10). Принцип построения вентильного электропривода реализован с учетом особенностей процесса коммутации. К исходным блокам структуры ВД, добавлен модуль формирования угла коммутации θ , содержащий квантователь информации по уровню (КИ), иначе квантователь угла поворота θ, и дополнительный сум-
матор. Реле типа триггера Шмитта (ТШ) определяет уголθo опережения или отставания в зависимости от знака
ошибки скоростного контура.
рис. 2 с точки зрения обоснования и выбора регуляторов представляет определенные затруднения. Это в основном обусловлено тем, что ВД описывается системой нелинейных дифференциальных и алгебраических уравнений, аналитическое решение которых в общем случае невозможно.
Результаты моделирования и исследования свойств ВД как автономного объекта при подаче скачка напряжения и нагрузки позволили выделить основные составляющие потокосцепления Ψd и тока Iq , которые опре-
деляют момент М, развиваемый двигателем.
Оценивая переходные характеристики ВД при выходе на скорость холостого хода и реакции на нагрузку, можно сделать вывод, что они подобны характеристикам двигателя постоянного тока.
С учетом данных допущений на рис. 3 представлена упрощенная структурная схема ВД, где составляющими момента Ψq и Id пренебрегли ввиду малости их
произведения.
Рис. 2. Структурная схема следящего вентильного электропривода
Шаг коммутации угла σ = θ = 2π/ k pn , где k – чис-
ло тактов системы управления. Число состояний коммутатора на цикле его работы
k = m N1 ,
где m – число фаз; N1 – число направлений тока в фа-
зах (N1 = 1 или 2) зависит от вида коммутации. Таким образом, приведение угла потокосцепления статора
θ* осуществляется к углу поворота ротора с учетом не только очередной коммутации его обмоток, но и числа пар полюсов. Структурная схема, представленная на
Рис. 3. Упрощенная структурная схема ВД
Таким образом, без учета дополнительных возмущений, вносимых коммутационными процессами в потокосцепление по составляющей Ψd , и пренебрегая
составляющей момента Мq = Ψq Id , двигатель можно
представить динамическим звеном второго порядка. Заметим, что фактор пульсаций снижается с увеличением числа пар полюсов.
В реальных системах при выполнении условия Tм ≥ 4Tя передаточную функцию двигателя можно за-
писать в виде произведения двух полиномов
|
|
|
W |
( p) = |
|
ω( p) |
|
= |
|
|
kд |
|
|
|
|
|
= |
|
|
|
|
||||
|
|
|
|
|
|
|
|
TмTя p2 + Tм p + 1 |
|
|
|
|
|||||||||||||
|
|
|
д |
|
U ( p) |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
kд |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(T1 p + 1)(T2 p + 1) |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
4T |
|
|
||
где |
T1 |
= − |
|
|
; T2 |
= − |
|
|
|
|
; |
|
p1,2 |
= − |
|
|
1 |
± |
1− |
я |
|
– |
|||
p |
p |
|
|
|
|
2T |
T |
||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
м |
|
|
|||
постоянные времени и корни характеристического
уравнения, K |
д |
= 1/ cФ , K |
м |
= R /(cФ)2 |
– передаточные |
|
|
я |
|
коэффициенты двигателя по управлению и возмуще-
|
J R |
|
|
|
|
Lq |
|
L |
|
нию; T = |
я |
и Т |
я |
= T |
= |
|
= |
я |
– электромеха- |
(cФ)2 |
R |
|
|||||||
м |
|
q |
|
|
R |
||||
|
|
|
|
|
|
|
|
я |
|
ническая и электромагнитная постоянные времени дви-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 155 -
гателя; c и Φ = Ψd – конструктивная постоянная и
N
поток двигателя; N – число витков; J – момент инерции двигателя.
Специфические особенности ВД необходимо учитывать при выборе контуров управления. Сугубо нелинейный характер контура формирования момента ВД не позволяет без дополнительных преобразований вводить в структуру управления контуры тока. Более того, одно из основных преимуществ ВД в режиме БМПТ – свойство внутреннего преобразования координат будет не востребовано.
С учетом этого, для реализации следящего электропривода (см. рис. 2) использованы два основных контура: скорости и положения. Силовой преобразователь Wп(p) показан с учетом ограничений на регулирование
напряжения.
Принцип построения следящего электропривода соответствует комбинированной системе программного управления, где в первом приближении функции интерполятора реализованы за счет задатчика скорости и угла (ЗСУ). Темп изменения скорости определяется постоянной времени Tω . Передаточная функция сило-
вого преобразователя, независимо от его типа, может быть представлена как апериодическое звено:
Wп( p) = kμ+ 1 ,
Tμ p
где kμ , Tμ – коэффициент и постоянная времени пре-
образователя.
При настройке контура скорости на модульный оптимум передаточная функция регулятора скорости должна быть
W ( p) = (τ1 p + 1)(τ2 p + 1) ,
рс |
τ3 p |
|
где τ1 = T1; τ2 = T2 ; τ3 = kμkд 2Tμ.
С достаточной степенью точности его функции могут быть реализованы регулятором с передаточной функцией
W |
( p) = |
(τ1 p + τ2 ) |
+ |
1 |
+ |
τ1τ2 p |
, |
|
|
|
|||||
рс |
τ3 |
|
τ3 p τ3 (τ4 p + 1) |
||||
|
|
|
|||||
где τ4 < τ3 .
Передаточная функция регулятора положения при настройке контура на модульный оптимум соответствует пропорциональному звену Wрп( p) = β.
II. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
Исследование рассмотренных принципов реализации следящего электропривода проводилось с учетом реальных свойств и ограничений регулятора скорости
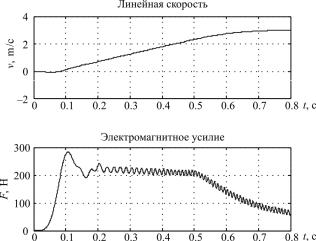
и преобразователя. Наиболее тяжелые условия работы следящего электропривода наблюдаются внизу диапазона регулирования скорости (рис. 4). Значительно большее перерегулирование скорости, чем ожидаемое, можно объяснить тем, что при выходе ВД из нейтрального состояния значительное влияние оказывает дифференциальная составляющая закона регулирования
ирелейный контур. В зависимости от ошибки скоростного контура происходит ввод опережающего или отстающего угла коммутации.
По своим свойствам регулятор скорости обеспечивает астатизм, как по управляющему, так и возмущающему воздействиям. Ошибка по углу незначительна
ивведение контура положения эффективно лишь в аналоговых системах управления. Контур положения внизу диапазона регулирования не оказывает существенного влияния на процессы, характеризующие работу вентильного привода.
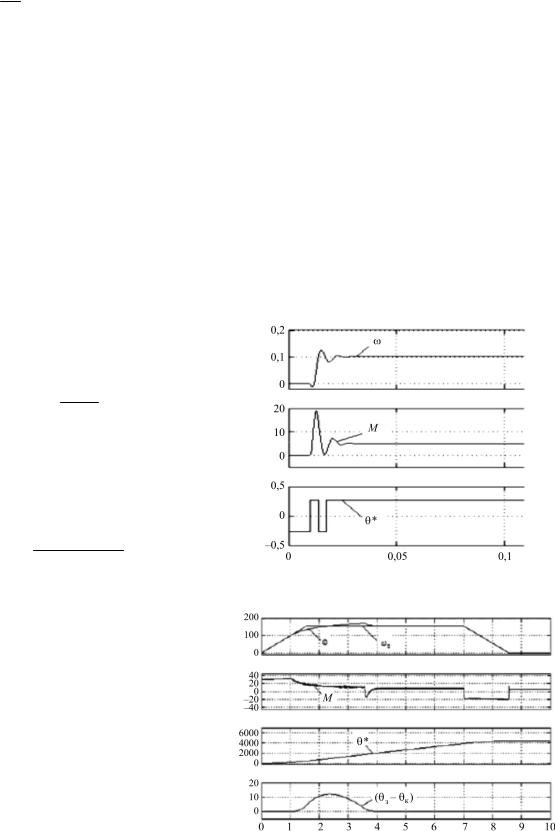
Работа контура на предельных скоростях, когда значительное влияние на динамику привода оказывает ЭДС вращения и ограничение по напряжению источника питания, показана на рис. 5.
Рис. 4. Переходные процессы внизу диапазона регулирования скорости
Рис. 5. Переходные процессы вентильного электропривода в предельно допустимых режимах скорости
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 156 -
При выходе на значения скорости, соответствующие указанным ограничениям, происходит уменьшение динамического момента и существенное отклонение скорости от заданного значения. В результате формируется значительное фазовое рассогласование между формируемым заданием и истинным значением угла поворота ротора. Привод тем не менее сохраняет устойчивость
ине выходит из синхронизма, так как очередная коммутация обмоток происходит лишь при достижении шага. Это влияет лишь на частоту коммутации. Перерегулирование по скорости вызвано лишь рассогласованием по положению, которое ликвидируется за счет увеличения частоты коммутации.
Таким образом, привод имеет адаптивные свойства, определяя темп движения в соответствии с нагрузкой
иразвиваемым моментом.
Практическая реализация контура слежения должна предусматривать контроль угла в значительных пределах, что определяет его работу, соответствующую организации контура позиционной системы регулирования.
ЗАКЛЮЧЕНИЕ
В рассмотренной структуре вентильного электропривода переход представления от синхронной машины к машине постоянного тока осуществляется путем введения математической модели коммутатора и ДПР, что раскрывает особенности работы ВД, связанные с преобразованием координат статорных цепей к координатам ротора. Это позволяет достаточно полно исследовать функционирование двигателя и оценить предварительные характеристики как проектируемых машин, так и системы управления в целом. Проведенные исследования подтверждают специфические особенности вентильного электропривода: абсолютную жесткость механических характеристик в диапазоне допустимых нагрузок – свойство СД, и снижение частоты вращения по сравнению с частотой холостого хода при увеличении момента нагрузки выше допустимого – свойство двигателя постоянного тока.
Дальнейшие исследование проводилось на имитационной модели программной среды Simulink и SimPowerSystem. В качестве основных компонентов системы регулирования были использованы: инвертор со звеном постоянного тока, синхронный двигатель типа
PMSM, блок управления, включающий ПИД-регулятор и формирователь упреждающего угла управления, блок модуляции широтно-импульсных управляющих сигналов. Были учтены особенности перехода от упрошенной структуры (см. рис. 2), которые в основном связаны с тем, что выходной сигнал регулятора скорости определяет амплитуду модулирующих сигналов широтноимпульсного модулятора. Переход к модели, приближенной по компонентам к реальной системе, осуществлялся с учетом особенностей коммутации трехфазного ВД, обмотки которого соединены в «звезду». Угол управления ключами инвертора в этом случае равен 2π/ 3, а принцип модуляции векторной ШИМ. Допол-
нительные исследования с реализацией более сложных законов синусоидальной ШИМ [9] выявили целесообразность их использования для формирования напряжений. Таким образом, если оценивать элементарные системы вентильного электропривода в режиме БМПТ по сравнению с векторными системами управления, то в большинстве практических применений они могут составить достойную конкуренцию, как в отношении регулировочных свойств, так и простоты реализации законов управления.
Библиографический список
1.Matsui N. Sensorless PM Brushless DC Motor Drives // IEEE Trans. Ind. Electron. 1996. Vol. 43. No. 2. P. 300–308.
2.Acarnley P. P., Watson J. F. Review of Position-Sensorless Operation of Brushless Permanent-Magnet Machines // IEEE Trans. Ind. Electron. 2006. Vol. 53. No. 2. P. 352–362.
3.Вентильные электродвигатели малой мощности для промышленных роботов / В.Д. Косулин, Г.Б. Михайлов, В.В. Омельченко, В.В. Путников. Л.: Энергоатомиздат, 1988. 194 с.
4.Михалев А.С., Миловзоров В.П. Следящие системы с бесконтактными двигателями постоянного тока. М.: Энергия, 1979. 160 с.
5.Safi S. K., Acarnley P. P., Jack A. G. Analysis and simulation of the high-speed torque performance of brushless DC motor drives // Proc. Inst. Elect. Eng. Electr. Power Appl. 1995. Vol. 142, No. 3. P. 191–200.
6.Соколовский Г.Г. Электроприводы переменного тока с частот-
ным регулированием. М.: Академия, 2006. 272 с.
7. Балковой А.П., Цаценкин В.К. Прецизионный электропривод
с вентильными двигателями. М.: Изд-во МЭИ, 2010. 328 с.
8.Дискретный электропривод с шаговыми двигателями / Б.А. Ивоботенко, В.П. Рубцов, Л.А. Садовский, В.К. Цаценкин; под общ. ред. М.Г. Чиликина. М.: Энергия, 1971. 624 с.
9.Способ формирования широтно-импульсных сигналов управления автономного инвертора: пат. РФ № 2326486 / В.М. Иванов.
БИ, 2008, № 16.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 157 -
УДК 621.452: 681.513.6
Параметрическое адаптивное управление электроэнергетической газотурбинной установкой
Б.В. Кавалеров, И.В. Бахирев
Пермский национальный исследовательский политехнический университет, Пермь, Россия
Parametric adaptive control gas-turbine power plant
B.V. Kavalerov, I.V. Bakhirev
Perm National Research Polytechnic University,
Perm, Russian Federation
Представлено исследование параметрического адаптивного управления газотурбинной установкой. Для настройки параметров регулятора используется настраиваемая модель. Работоспособность метода подтверждена результатами математического моделирования.
This article presents research of parametric adaptive control of a gas turbine unit. Adaptive model is used for tuning the controller parameters. The method efficiency is confirmed by the mathematical modeling results.
Ключевые слова: настраиваемая модель, газотурбинная установка, адаптивное управление, функция Ляпунова.
Keywords: adaptive model, gas turbine plant, adaptive management, Lyapunov function.
ВВЕДЕНИЕ
Газотурбинные установки (ГТУ) нашли широкое применение в качестве газоперекачивающих агрегатов и электростанций различной мощности. К газотурбинным электростанциям (ГТЭС) в ГОСТе предъявляются достаточно жесткие требования по качеству производимой электроэнергии. В свете этих требований использование алгоритмов адаптации для совершенствования существующих систем автоматического управления (САУ) ГТУ выглядит перспективным.
В современной теории управления существует множество методов, так или иначе использующих математическую модель объекта управления. Рассмотренный в данной статье метод параметрической адаптации с использованием настраиваемой модели позволяет сократить предварительные исследования объекта, так как процесс идентификации протекает параллельно с процессом параметрической настройки (ПН).
I. МОДЕЛЬ ГТУ
Для проведения исследований используется упрощенная модель ГТУ, полученная с помощью идентификации методом наименьших квадратов [1]. Структура дифференциальных уравнений выбрана с учетом априорной информации об основных физических принципах преобразования энергии в ГТУ. Модель сохраняет допустимую адекватность для работы САУ ГТУ в режиме стабилизации частоты вращения свободной турбины ГТУ от холостого хода до 1,2 номинальной нагрузки.
а) Уравнение ротора турбокомпрессора
|
|
|
|
dnтк |
= (n |
− n |
) / T |
(n |
); |
|
|
(1) |
|||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
dt |
|
ts |
тк |
|
|
|
тк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) Уравнение свободной турбины: |
|
|
|
|
|||||||||||
|
dn |
1 |
|
|
|
|
dn |
|
|
|
|
|
|
||
|
ст |
= |
|
|
|
1+ ke |
|
тк |
NE |
− NG |
, |
(2) |
|||
|
|
|
|
|
|
||||||||||
|
dt |
nстJ (nст) |
|
|
dt |
|
|
|
|
||||||
где nts = f (Gт) – нелинейная статическая характеристика, отражающая преобразование расхода топлива (кг/час)
вобороты турбокомпрессора (об/мин); T (nтк) – постоянная времени турбокомпрессора, зависящая от текущей
частоты вращения турбокомпрессора; NE = f (nтк) – нелинейная статическая характеристика, отражающая преобразование частоты вращения турбокомпрессора (об/мин)
вмощность свободной турбины (кВт); NG – мощность нагрузки (кВт); J (nст) – суммарный приведенный к валу свободной турбины момент инерции; nст – частота вращения свободной турбины (об/мин). Турбокомпрессор представлен апериодическим звеном, так как переходный процесс по частоте вращения турбокомпрессора имеет явный апе-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 158 -
риодический характер. Свободная турбина представлена идеальным интегрирующим звеном, так как при расбалансе мощностей NE и NG частота вращения свободной турбины или возрастает, или уменьшается практически по линейному закону (при рассмотрении больших промежутков времени переходный процесс отклоняется от линейного, но для режима стабилизации nст этим можно пренебречь).
Линейная настраиваемая модель получается из модели ГТУ (1), (2) линеаризацией вблизи точки номинального режима. Номинальный режим ГТУ – 6000 кВт. Эталонная модель включает в себя помимо уравнений собственно ГТУ (1), (2) также регуляторы ГТУ. В режиме стабилизации nст основную роль играют два регулятора САУ ГТУ: регулятор частоты вращения свободной турбины nст и регулятор дозатора газа. Регуляторы включаются последовательно. Передаточная функция регулятора nст имеет следующий вид [2]:
WСТ (p) = kП |
ki |
+ k f p |
, |
(3) |
||
k |
i |
+ p |
||||
|
|
|
||||
передаточная функция дозатора газа
WG (p) = |
1 + TД p |
k |
Д . |
(4) |
|
||||
|
p |
|
|
|
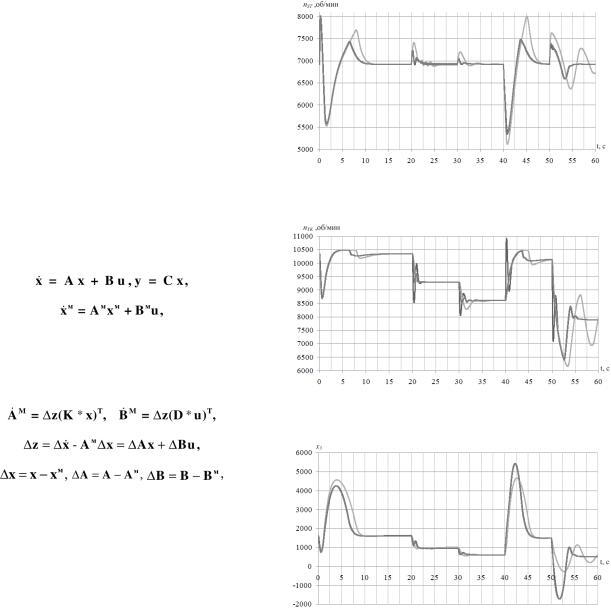
В первую очередь рассмотрим алгоритм настройки линейной модели в процессе управления. В [3] он рассмотрен для линейного объекта и линейной модели, имеющих в пространствах состояний следующий вид:
(5)
(6)
где вектор x представлен в следующем виде: x1 = nст, x2 = nтк, x3 – выход интегратора регулятора дозатора газа, x4 – выход интегратора регулятора nст.
Алгоритм настройки будет иметь следующий вид:
(7)
(8)
(9)
где K, D – положительно-определенные диагональные матрицы заданных постоянных коэффициентов. Все
векторы x, xм, u, x, xм считаются непосредственно
наблюдательными (измеряемыми). Устойчивость процесса идентификации обеспечивается благодаря функции Ляпунова.
II. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
Рассмотрим возможность параметрической настройки при использовании настраиваемой модели. В результате экспериментов наилучшие переходные процессы
были получены при настройке параметров регулятора свободной турбины следующим образом: kf – настраивается по интегратору дозатора газа, kп – настраивается по частоте вращения свободной турбины, ki – по интегратору регулятора свободной турбины. Настройка коэффициентов регулятора дозатора газа не производится. Нагрузка изменяется следующим образом 6000 кВт – 3000 кВт – 1000 кВт – 5500 кВт – 500 кВт. Результаты представлены на рис. 1–4.
Из приведенных выше рисунков видно, что показатели качества переходных процессов улучшились.
Изменения коэффициентов регулятора частоты свободной турбины представлены на рис. 5–7.
Рис. 1. Частота вращения свободной турбины: черный – НМ; темно-серый – система с ПН; светло-серый – система со штатным регулятором
Рис. 2. Частота вращения турбокомпрессора: черный – НМ; темно-серый – система с ПН; светло-серый – система со штатным регулятором
Рис. 3. Интегратор регулятора дозатора: черный – НМ; темно-серый – система с ПН; светло-серый – система со штатным регулятором
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 159 -
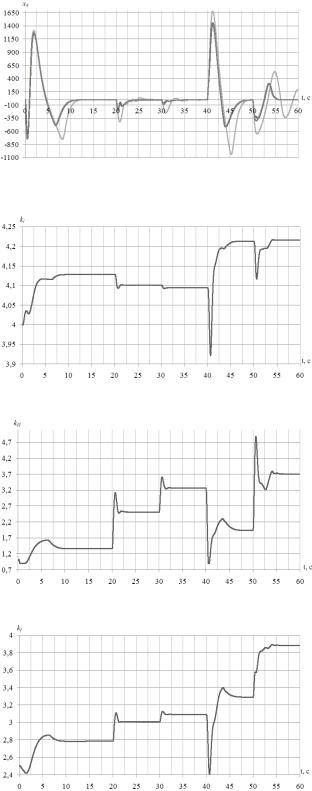
Рис. 4. Интегратор регулятора свободной турбины: черный – НМ; темно-серый – система с ПН; светло-серый – система со штатным регулятором
Рис. 5. Интегральный коэффициент регулятора свободной турбины
Рис. 6. Пропорциональный коэффициент регулятора свободной турбины
Рис. 7. Форсирующий коэффициент регулятора свободной турбины
Относительно малый диапазон изменения коэффициентов регулятора обусловлен тем, что в штатном селективном регуляторе ГТУ есть много контуров ограничения, которые могут перехватить приоритет управления при большом отклонении от начальных параметров регулятора.
ЗАКЛЮЧЕНИЕ
Метод адаптивного управления с параметрической настройкой и настраиваемой моделью улучшает качество переходных процессов ГТУ. Главным достоинством предложенного метода является независимость от статических характеристик объекта управления, которые могут меняться со временем и в зависимости от различных внешних факторов. К недостаткам можно отнести требования к измеримости вектора переменных состояния и вектора производных состояния. Для вычисления вектора производных в реальной системе может потребоваться дополнительная фильтрация шумов, также определенные коррективы может внести транспортное запаздывание. Для использования в составе штатного селективного регулятора требуется определить алгоритм для настройки модели, в случае когда приоритет управления переходит к другому регулятору. В рамках развития этого метода управления предполагается исследовать возможности для улучшения показателей качества переходных процессов настраиваемой модели.
Благодарности
Опубликованные в статье результаты получены в рамках выполнения государственного задания Минобрнауки РФ № 13.832.2014/K «Разработка методологических основ адаптивного управления автономными и неавтономными газотурбинными электростанциями мощностью до 25 МВт».
Библиографический список
1.Идентификация газоперекачивающего агрегата для модельного испытания и настройки системы управления / Г.А. Килин, Б.В. Кавалеров, И.В. Бахирев, А.Ю. Поварницын // Вестн. Воронеж. гос. ун-та. Серия: Системный анализ и информационные технологии. 2014. № 1. С. 65–71.
2.Бахирев И.В., Басаргин Ш.Д., Кавалеров Б.В. Адаптивное управление газотурбинной установкой с эталонной моделью и сигнальной настройкой // Системы управления и информационные тех-
нологии. 2015. № 2 (60). С. 71–76.
3.Красовский А.А. Справочник по теории автоматического управ-
ления. М.: Наука, 1987. 711 с.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 160 -