

книги / Промышленные роботы. Ч. 3
.pdfстепенью надежности: ее невозможно обмануть, подменить или саботировать, что особенно важно на фоне роста числа квалифицированных автомобильных краж.
На транспорте в России до 2011 г. будет внедрена система навигации ГЛОНАСС. К этому времени будет налажено массовое производство отечественных приемников для спутниковой навигации.
Для точного ориентирования на местности Роскартография намерена до 2010 г. завершить создание цифровых открытых навигационных карт для всей территории России.
101
VI. БИОНИЧЕСКИЙ ПОДХОД К РАЗРАБОТКЕ РОБОТОВ
Бионический подход в разработке автоматизированных автономных устройств используется в робототехнике с первых шагов ее развития. Можно сказать, разнообразие живого мира, способности адаптации отдельных организмов к среде обитания и выполнению специальных операций, энергетическая экономичность, оснащенность средствами сенсорики и коммуникации побуждают инженеров вступать в соревнование с природой.
6.1.Змеевидные роботы
6.1.1.Змееподобный робот для диагностики трубопроводов
Внастоящее время общая протяженность магистральных трубопроводов в России превышает 300 тыс. км. При этом около 40 % газопроводов и 60 % нефтепроводов находится в эксплуатации более 20 лет.
Очевидно, что традиционный подход к поддержанию работоспособности трубопроводов путем проведения капитальных ремонтов отдельных участков труб не может обеспечить надежность и безопасность магистральных нефтегазопроводов из-за их большой протяженности и различного состояния.
Поэтому основной стратегией обеспечения высокой надежности магистральных систем становится эксплуатация и ремонт «по фактическому состоянию», т.е. переход к выборочному «точечному» ремонту элементов и участков по результатам 100%-ного диагностического обследования многокилометровых трубопроводов. В последние годы все большее значение приобретает метод бестраншейной инспекции и ремонта трубопроводов с помощью роботов. Одной из актуальных задач в этом направлении является создание змеевидного мобильного робота.
Область возможного применения змеевидных роботов необычайно широка. Это и подвижные управляемые извне макеты змей, используемые в киноиндустрии и индустрии развлечений, и специализированные роботы, предназначенные для выполнения исследовательских, инспекционных и спасательных работ в экстремальных условиях и чрезвычайных ситуациях на Земле и в планируемых экспедициях на другие планеты.
Биологические змеи распространены по всей планете, а способы передви-
жения и физиология этих существ делают их в высшей степени приспособлен-
102

ными к обитанию в средах с различными климатическими условиями. Змеевидное устройство, способное скользить, плавно передвигаться и перекатываться, перемещаясь по плохо структурированным поверхностям, в подвижных (сыпучих и жидких) средах, перемещаться в ограниченных областях, рассматривается как эффективная альтернатива традиционному шагающему или колесному роботу. Для выполнения змееподобных движений механическая система должна обладать числом степеней свободы, превосходящим число степеней свободы традиционных манипуляторов, поэтому змеевидные роботы вместе с хоботообразными манипуляторами относятся к классу гиперизбыточных роботов.
Уже разработана двадцатизвенная бесколесная модель змеевидного мобильного робота, предназначенного для диагностики трубопроводов (рис. 79). При ее разработке поиск программных движений строился на основе стохастических, генетических и нейронных алгоритмов и были получены режимы движения, сходные с наблюдаемыми у пресмыкающихся, и новые, не зафиксированные в живой природе. Следует отметить, что трудности организации целенаправленного перемещения бесколесного змеевидного робота в значительной мере были связаны с отсутствием рациональной механической модели перемещения гибкого змеевидного тела.
Рис. 79. Конструкция змеевидного робота
103
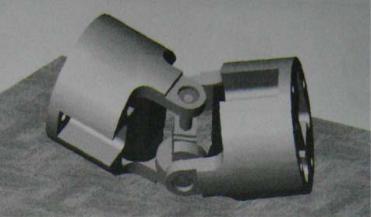
На основе виртуальной модели было проведено исследование локомоций змеевидного робота, состоящего из подвижных модулей (рис. 80).
Рис. 80. Модуль змеевидного робота
Рассматриваемые роботы с диагностическими датчиками на борту предназначены для движения внутри труб малых диаметров, в диапазоне от нескольких миллиметров до десятков сантиметров, с целью выполнения технической диагностики машин и агрегатов нефтехимической и газовой промышленности, энергетических объектов, проведения регламентных и ремонтных работ трубопроводов малых диаметров, а также применения в технологических процессах высокоточной обработки изделий для энергетических систем.
Всостав систем управления роботами входят датчики для обеспечения высокоточных движений. Роботы оснащены бортовыми телекамерами, необходимыми для получения визуальной информации о состоянии внутренних поверхностей труб. Эта информация затем подвергается микропроцессорной обработке. В качестве диагностических устройств могут применяться микродатчики, построенные на иных принципах, например ультразвуковые (для выявления внутренних трещин), электромагнитные и другие, реализующие методы неразрушающего контроля.
Внастоящее время появились роботы-инспекторы, которые позволяют осуществлять контроль намного проще и эффективнее. Миниатюрный робот
стелекамерой запускается внутрь трубы и старательно осматривает ее миллиметр за миллиметром. Для передвижения подобных роботов можно использовать разные способы – электростатические, пьезоэлектрические, ультразвуковые и др.
Реализация микропроцессорного управления движением миниатюрных
роботов внутри труб малых диаметров представляет собой сложную научнотехническую задачу в связи с малыми размерами изделий и ограниченным
104

пространством, в котором происходит движение. Это обусловливает необходимость повышения автономности управления и учета особенностей миниатюризации конструкции и специфики принципа действия механической системы робота.
6.1.2. Подводный робот-змея
Подводного робота-змею создали инженеры японского научноисследовательского института NEDO. Механическая рептилия ACM-R5 имеет длину 2 м, весит 8 кг и может автономно работать в течение 30 мин. Управление осуществляется по радио. Следуя командам, ACM-R5 может менять высоту, скорость и направление движения. Перемещается змея, как и ее биологический аналог, извиваясь всем телом. Свое местоположение робот определяет с помощью гидросенсоров и цифровой камеры, данные обрабатываются 32-битным микропроцессором. Змея умеет не только плавать, но и двигаться по дну. Робот сконструирован не ради демонстрации высоких технологий, а для практических нужд. Змеи с более емкими аккумуляторами смогут обследовать океаническое дно для предупреждения землетрясений и прокладывать или ремонтировать оптоволоконные кабели.
6.2. Подводные роботы
Новое поколение роботов исследует глубины океана. Эти механические существа способны выполнять под водой самые сложные работы. Своим внешним видом они напоминают обитателей моря – рыб и животных, идеально приспособленных для жизни в водной среде.
Подводный робот – мини-субмарина (рис. 81) – создан для изучения рельефа морского дна и составления его карты, а также для проведения других исследований.
Рис. 81. Подводный робот мини-субмарина
105

Аппарат имеет модульную конструкцию, что позволяет ему выполнять различные задания, меняя «профиль» в самое короткое время. Маршрут его плавания закладывается в бортовой компьютер заранее.
Подводный робот может действовать в радиусе 480 км. Зарядки аккумуляторов ему хватает на 72 ч работы, роботом планируется оснащать многоцелевые военные катамараны.
По своей форме он напоминает торпеду, однако его размеры (8,5 м в длину и примерно 1 м в диаметре) не позволяют запускать его из торпедных аппаратов, калибр которых не превышает 50 см.
Подводный робот-сапер был сконструирован для наблюдения за состоянием окружающей среды, а затем приспособлен для военных целей. Робота (рис. 82) научили обнаруживать мины в прибрежных водах, сканировать большие водные области.
Рис. 82. Подводный робот-сапер
Небольшой и легкий (около 3,2 кг) робот способен передвигаться под водой со скоростью около 3–5 узлов на глубине до 90 м, и запас его хода составляет 60 км.
Другой представитель подводных роботов, предназначенных для разминирования, называется Surt Zone Crawler. Такие роботы использовались для поиска людей под обломками Всемирного торгового центра и среди останков судов и самолетов в водах Ла-Манша у берегов Нормандии.
Робот можно назвать «земноводным»: он может передвигаться по земле со скоростью 2,4 м/с и под водой – с меньшей скоростью, а также умеет обходить препятствия. Время автономной работы «прибрежного» робота составляет 4–6 ч, за это время он может пройти расстояние в 13 км. Робот может оборудоваться различными детекторами и системой видеонаблюдения, чтобы в сложных случаях в его работу мог вмешаться оператор и принять необходимое решение.
106
6.3. Движущиеся роботы
Картина мира, где роботы свободно разгуливают по всей Земле и готовы взяться за любую опасную работу, способна захватить воображение каждого; однако прежде, чем она станет реальностью, ученым потребуется преодолеть множество серьезных преград.
Чтобы охарактеризовать истинное положение дел в области создания движущихся роботов, отметим, что ряд промышленных объединений, заинтересованных в этом виде техники, относят понятие «робот» только к манипуляторам. Когда фирма «Юнимейшн» приступила к выпуску программируемых манипуляторов для окраски методом распыления, для точечной сварки и транспортировки деталей, наиболее совершенными из автоматических движущихся машин были лабораторные устройства, весьма похожие на игрушки. Так, робот «Бист» (зверь) мог передвигаться по комнатам, удерживаясь на определенном расстоянии от стен путем систематического измерения дальности с помощью ультразвукового дальномера. Оптическая система этого робота вела поиск черных крышек настенных электрических розеток, и, как только такая крышка появлялась в поле ее зрения, робот пытался вставить в нее смонтированную на манипуляторе электрическую вилку, чтобы перезарядить свои аккумуляторы.
Роботы-манипуляторы в течение 20 лет занимали ведущее место в лабораторных исследованиях, связанных с искусственным интеллектом. Ученые пытались объединить «интеллектуальные» программы с алгоритмами интерпретации данных, поступающих с телекамер и микрофонов, а также с программами, которые управляют действиями манипуляторов и перемещением подвижных платформ.
Посмотрев на мир живого, мы убедимся, что сочетание трудностей с открывающимися возможностями усиливает «эффект отбора», в результате которого виды живых существ, наделенные способностью перемещаться, развиваются в совершенно иных направлениях, чем неподвижные организмы.
Некоторые простейшие движущиеся роботы уже нашли применение на промышленных предприятиях, складах и в учреждениях. Эти системы выпускаются многими мелкими компаниями и отделениями крупных фирм. Так, операции загрузки-разгрузки на многих холодильных предприятиях для хранения пищевых продуктов, арктический холод которых отнюдь не благоприятен для человека, проводятся с помощью автоматических вилочных укладчиков. Все действия укладчиков координируются центральным компьютером, однако раз-
107

мещенные в них датчики весьма просты. Вилочные укладчики движутся, направляемые пульсирующими магнитными полями, которые создаются системой проводников, уложенных под полом помещения; при разгрузке стеллажей «стыковка» укладчика с паллетами, заполненными продуктами, осуществляется с помощью инфракрасных датчиков ближней локации. Но если укладчик вдруг сталкивается с препятствием или возникают другие аварийные ситуации, то обязательно требуется вмешательство человека.
Движущиеся роботы, имеющие еще более простые конструкции, «патрулируют» коридоры некоторых учреждений и больниц. Эти автономные машины похожи на большие сервировочные столики. Они перемещаются по строго определенной дорожке, нанесенной прозрачной, но фосфоресцирующей жидкостью; ее ультрафиолетовое излучение воспринимают фотодатчики, установленные в нижней части робота. Такие роботы-тележки служат для перевозки почтовых отправлений в различные отделы учреждения или доставки постельного белья в больницах. Двигаясь, они издают тихий предупредительный сигнал и при столкновении с любым предметом сразу же останавливаются.
Примерно 70 % земной поверхности недоступны для транспортных средств, созданных руками человека, хотя во многие недоступные места можно добраться верхом на лошади. Проблема здесь заключается в характере точки опоры. Колесо – блестящее изобретение, однако оно лишь наполовину решает проблему передвижения, ибо для его эффективного использования нужна гладкая опорная поверхность.
Сравнив колеса с ногами, нетрудно заметить, что при движении колеса не контролируетсяпроисходящее вточках соприкосновенияего с поверхностью: нагрузка простоприкладываетсякследующимодинзадругимучасткамдороги(рис. 83).
Рис. 83. Робот на колесах
108
Шагающее же существо в состоянии само выбирать точки контакта ноги с поверхностью и учитывать ее неровности. При наличии гладкой твердой дорожной поверхности колесо, безусловно, служит основой наиболее эффективных средств передвижения. На естественной земной поверхности, которая, как правило, изобилует неровностями, колесо во многих случаях оказывается абсолютно бесполезным и побеждают ноги.
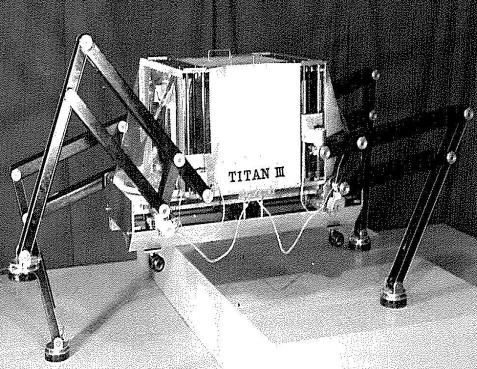
В настоящее время создано множество игрушек, которые на первый взгляд кажутся шагающими, но на самом деле переставляют ноги чисто механически, не используя потенциальных возможностей регулируемого взаимодействия с опорной поверхностью. Чтобы шагать по-настоящему, нужно располагать подробными сведениями о ближайшем окружении. Машины (рис. 84), способные шагать именно в таком смысле этого слова, появились после того, как для проведения множества необходимых измерений и процедур принятия соответствующих решений стали широко использоваться компьютеры.
Рис. 84. Шагающий робот-шестиног
В качестве примера рассмотрим миниатюрный шестиногий робот. Миниатюрный шестиногий робот (гексапод), построенный по результатам
изучения системы передвижения таракана (рис. 85), имеет длину около 17 см, бегает со скоростью 55 см/с и успешно преодолевает препятствия.
109

Рис. 85. Гексапод
Компьютерная модель робота рассчитывает закон его движения в трехмерной среде, образованной заданными препятствиями и опорными поверхностями, с учетом кинематических, динамических и геометрических ограничений
ипозволяет получить выражения для управляющих электрических напряжений
исил взаимодействия стоп ног аппарата с опорой вместе с уравнениями динамики робота как системы абсолютно твердых тел с 24 степенями свободы.
Результаты компьютерного экспериментирования с указанной моделью представляются в виде стилизованного отображения на экране монитора последовательных положений робота в окружающей его среде с препятствиями. Врезультате этого оказывается возможным контролировать качество реализации закона программногодвиженияробота, посылаемогонавходалгоритмауправления.
Программное движение робота формируется посредством представления
его конфигурации в пространстве в зависимости от скалярного параметра t > 0 (в частном случае t – время движения).
Переносы ног осуществляются адаптивно в соответствии с модифицируемыми в зависимости от ситуации шаговыми циклами (рис. 86). В процессе переноса стопы ног принадлежат плоскостям Ci xi yi , причем
|
|
|
i ; |
|
|
|
|
|
i (en i ); rC |
(ri (t1 ) ri (t2 )) / 2; |
|
|
|
|
|||||||
i ri (t2 ) ri (t1 ); Ci xi |
|
Ci |
yi |
|
|
|
||||
|
|
|
|
|
|
|
|
|
i |
|
xi dx cos ; |
dx i |
/ 2; |
yi (d y ys )sin ys ; |
(t), |
||||||
где i – радиус кривизны; ri (t1 ) – радиус-вектор положения стопы в начале фазы переноса (точка A на рис. 86), когда t t1, ri (t2 ) – радиус-вектор положения стопы в конце фазы переноса (точка B на рис. 86), когда t t2 , en – единичный
110