

книги / Теория механизмов и механика машин
..pdfЛюбое незакрепленное тело в пространстве имеет 6 степеней свободы, на плоскости – 3.
Кинематические пары классифицируют либо по числу связей, либо по числу подвижностей:
Число связей |
Класс КП |
Число подвижностей |
S = 1 |
p1 |
H = 5 |
S = 2 |
p2 |
H = 4 |
S = 3 |
p3 |
H = 3 |
S = 4 |
p4 |
H = 2 |
S = 5 |
p5 |
H = 1 |
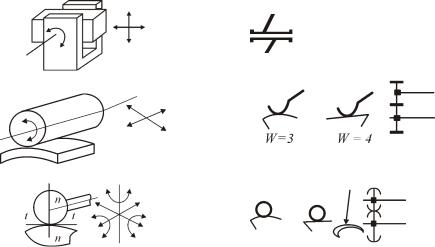
Существует 5 классов кинематических пар. Примеры различных КП приведены в табл. 2.1.
|
|
|
Таблица 2.1 |
|
|
|
|
Вид пары |
Схема пары и ее |
Подвиж- |
Условные обозначения |
и ее ход |
подвижности |
ность |
пары на структурных и |
|
|
пары |
кинематических схемах |
|
|
|
|
Вращательная |
|
1 |
|
|
|
|
|
Поступательная |
|
1 |
|
|
|
|
|
Винтовая |
|
1 |
|
|
|
|
|
Цилиндрическая |
|
2 |
|
|
|
|
|
Сферическая |
|
3 |
|
|
|
|
|
11
|
|
|
|
|
|
Окончание табл. 2.1 |
|
Вид пары |
Схема пары и ее |
Подвиж- |
Условные обозначения |
|
|||
и ее ход |
подвижности |
ность |
пары на структурных и |
|
|||
|
|
|
пары |
кинематических схемах |
|
||
|
|
|
|
|
|
|
|
Плоскостная |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
Линейная |
|
|
|
3 |
|
|
|
|
|
(4) |
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Точечная |
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
По характеру контакта образующих КП звеньев выделяют следующие пары:
1)низшие:
вращательные,
поступательные;
2)высшие.
Контакт звеньев в низшей кинематической пары осуществляется по поверхности, а в высшей – либо по линии, либо в точке.
2.2. Определение числа степеней свободы рычажных механизмов
В плоском механизме все звенья движутся в одной плоскости, все оси параллельны друг другу и перпендикулярны плоскости механизма.
Число степеней свободы таких механизмов определяется по формуле Чебышева:
W = 3n − 2 pн − рв,
где n – число подвижных звеньев механизма; рн и рв – соответственно число низших и высших КП.
Например, для механизма, показанного на рис. 1.5, число степеней свободы рассчитывается следующим образом:
n = 3, pн = 4 , рв = 0 , W = 3 3 −2 4 =1.
В пространственном механизме оси непараллельные, звенья могут двигаться в разных плоскостях.
Допустим, что механизм, изображенный на рис. 1.5, – пространственный и все кинематические пары относятся к 5-му классу, т.е. пары A5, B5, C5, D5 одноподвижны, тогда
12
W = 6n −(5 р5 + 4 р4 +3р3 + 2 р2 + р1),
где р1, р2 , р3 , р4 , р5 – число кинематических пар i-го класса.
W = 6 3 − 5 4 = −2,
следовательно, цепь статически неопределимая.
Для получения Wдейств = 0 добавим 3 движения. В результате появ-
ляются избыточные связи
q =Wдейств −W =1−(−2) = 3.
Для того чтобы их устранить, надо изменить класс некоторых кинематических пар, при этом нельзя изменять класс КП А. Поэтому сделаем КП В сферическим шарниром, т.е. отнесем его к 3-му классу (добавим 2 подвижности), а КП С – к 4-му классу (добавим 1 подвижность). Тогда
Wпр = 6 3 − (5 2 + 4 1 + 3 1) =18 −17 =1.
Формула, по которой определяется число степеней свободы рычажного пространственного механизма, называется формулой Сомова – Малы-
шева:
n
Wпр = 6n − ∑ рi + q , i=1
где рi – число кинематических пар соответствующего класса.
2.3. Кинематический анализ рычажных механизмов
Зависимость линейных координат хС в какой-либо точке механизма (например в точке С) от обобщенной координаты называется линейной функцией положения данной точки в проекциях на соответствующие оси координат.
хС = f(ϕ1),
где ϕ1 – обобщенная координата.
Зависимость угловой координаты ϕ2 какого-либо звена механизма от обобщенной координаты называется угловой функцией положения данного звена.
ϕ2 = f(ϕ1).
Первая производная линейной функции положения точки по обоб-
щенной координате называется линейной передаточной функцией данной точки в проекциях на соответствующие оси координат (иногда ее назы-
вают аналогом линейной скорости).
Дифференцируя линейные координаты по обобщенной координате, получаем аналоги скоростей:
13

dxС |
=V |
qСх |
, |
dyС |
=V |
qСу |
, |
dxС |
|
dt |
=V |
, |
|
|
dt |
dϕ1 |
|||||||||
dφ1 |
|
dφ1 |
|
|
qСх |
|
||||||
dxС |
=V |
, |
dt |
= |
1 |
, |
|
VСx |
=V |
, |
dt |
С |
|
dϕ |
|
ω |
|
|
ω |
qСх |
|
|
|
1 |
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
1 |
|
|
|
VСx = ω1VqСх, VСy = ω1VqСу,
где VqСх, VqCу – аналоги скорости точки С по оси х и y соответственно. Полная скорость т. С
VC = 
 VC2х +VC2у .
VC2х +VC2у .
Первая производная угловой функции положения звена по обобщенной координате называется передаточным отношением.
dφ2 |
= u2−1 |
dt |
|
ω2 |
= u2−1 , |
dφ |
dt |
ω |
|||
1 |
|
|
|
1 |
|
где u2−1 – обобщенная функция.
Вторая производная линейной функции положения по обобщенной координате называется аналогом линейного ускорения точки в проекциях на соответствующие оси.
d2 x |
|
|
|
d2 y |
|
|
|
|
|
|
С |
= a |
qСх |
, |
|
C |
= a |
qСу |
, |
dφ |
2 |
dφ2 |
|||||||
|
|
|
|
1 |
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
где aqСх, aqСу – аналоги линейного ускорения точки в проекциях на оси x
и y соответственно.
Вторая производная угловой функции положения звена по обобщен-
ной координате называется аналогом углового ускорения звена.
Рассмотрим аналитический способ определения кинематических параметров рычажных механизмов.
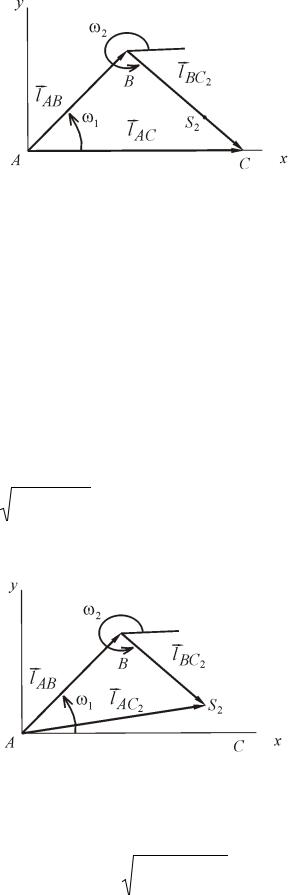
Дано: ω1 – угловая скорость входного звена; lAB – длина звена АВ; lBS2 – координата центра масс звена 2; lBC – длина звена ВС; lAC – длина звена АС.
Определить Vi – скорость i-го звена.
Для определения этой скорости целесообразно использовать метод проецирования векторного контура на оси координат.
Чтобы определить функции положения точки С, представим длины звеньев в виде векторов (рис. 2.1).
Запишем условие замкнутости контура: |
|
lrAB +lBC =lAC , |
(2.1) |
14
lABcosφ1 +lBCcosφ2 = xC , |
(2.2) |
lABsin φ1 +lBCsinφ2 = 0. |
(2.3) |
Из рис. 2.1 и уравнения (2.3) следует, что
|
|
|
|
|
|
|
lAB sin φ1 |
|
|
||
φ2 |
= arcsin |
|
. |
(2.4) |
|
lBC |
|||||
|
|
|
|
||
Продифференцируем |
(2.3) |
и (2.2) по обобщенной координате:
Рис. 2.1. К аналитическому способу определения кинематических параметров
l AB cos φ1 + lBC cos φ2 |
|
dφ2 |
|
=VqС у , − |
lAB cos φ1 |
= u2−1; |
|
(2.5) |
||||||||||||||||
|
|
|
|
|||||||||||||||||||||
dφ1 |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
123 |
|
|
|
|
lBC cosφ2 |
|
|
|
|
||||||||
|
|
|
|
|
{ |
|
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
=U2−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
−l |
AB |
sin φ −l |
BC |
sin φ |
2 |
|
dφ2 |
=V |
. |
|
|
|
||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
dφ |
qСх |
|
|
|
|
||||||
Определяем скорости: |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
VСx = ω1VqСх, |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
VСy = ω1VqСу = 0, |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
V |
= |
V 2 |
+V 2 . |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
С |
|
|
Сx |
|
|
|
Сy |
|
|
|
|
|
|
||||
Если необходимо определить функции положения центра масс, то вы- |
||||||||||||||||||||||||
делим векторный контур ABS2 (рис. 2.2). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Условие замкнутости дан- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ного векторного контура имеет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
следующий вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lrAB +lrBS2 = lAS2 , |
|
(2.6) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
lABcosφ1 + lBS2 cosφ2 = xS2 , (2.7) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
lABsinφ1 +lBS2 sinφ2 = yS2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Продифференцируем урав- |
|
Рис. 2.2. Векторный контур рычажного |
||||||||||||||||||||||
нения (2.6) и (2.7) по обобщен- |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
механизма |
|
|
||||||||||||
ной координате и получим ана- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
логи линейных скоростей точки S2 в проекциях на оси х и у: |
|
|
||||||||||||||||||||||
V |
S2 x |
= ω V |
|
, V |
S2 y |
= ω V |
2 y |
, |
V |
S2 |
= V 2 |
|
+V 2 |
. |
(2.8) |
|||||||||
|
1 |
qS2 x |
|
|
|
1 |
qS |
|
|
|
|
S2x |
S2 y |
|
|
|||||||||
15

2.4. Кинетостатический расчет механизмов
Силовой расчет механизмов заключается в нахождении неизвестных сил при заданном законе движения ведущего звена. Действительно, нельзя одновременно задать все силы, действующие на звенья механизма, и закон движения. Поэтому некоторые силы должны определяться из условия обеспечения требуемого движения механизмов. Такие силы будем называть в дальнейшем уравновешивающими (Fy). Число их равно подвижности механизма, т.е. числу ведущих звеньев. В механизме с одной степенью свободы определяется одна уравновешивающая сила. В ряде случаев вместо уравновешивающей силы определяется пара сил, момент которых бу-
дем называть уравновешивающим.
По уравновешивающей силе можно судить о силе движущей или силе сопротивления, при которой сохраняется заданный закон движения.
Пусть на ползун С механизма (рис. 2.3) действует сила Fс. (остальными силами в данном примере пренеб-
|
режем). |
|
Если это механизм компрессо- |
|
ра, а Fc – сила сопротивления нагне- |
|
танию, то по уравновешенному мо- |
Рис. 2.3. Кривошипно-ползунный |
менту My можно определить дви- |
механизм |
жущую силу. |
|
Если же это механизм двигателя внутреннего сгорания, а Fд – сила давления газов на поршень, то по My находят момент сопротивления Мс на главном валу АВ, который может быть определен при сохранении заданного закона движения.
В общем случае Мс будет различным в различных положениях механизма, и практически невозможно обеспечить закон изменения движущихся сил или сил сопротивления. Так, при заданном направлении и равномерном вращении кривошипа ω = const появляется неравномерность хода
δ = ωmaxω−ωmin , cp
где ωmax ,ωmin ,ωср – максимальная, минимальная и средняя угловые ско-
рости.
Кроме уравновешивающих моментов при силовом расчете определяются силы взаимодействия звеньев – реакции в кинематических парах, знание которых необходимо конструктору для расчета механизма на прочность. Реакции также не остаются постоянными, поэтому строятся годографы и расчет на прочность производится по наибольшим усилиям. Что-
16
PNRPU
бы определить уравновешивающий момент и реакции в кинематических парах механизма, надо знать приложенные к его звеньям силы.
Силовой расчет удобнее всего проводить, основываясь на принципе Даламбера. Он позволяет применить к телу, движущемуся с ускорением, уравнения статики. Для этого нужно ко всем действующим на данное тело силам добавить так называемые силы инерции (кинетостатический метод).
2.4.1. Статическая определимость структурных групп
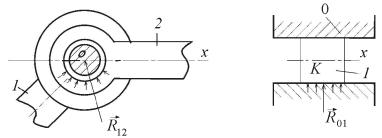
Силовой расчет плоских механизмов ведется при предположении, что кинематические пары являются низшими и содержат только вращательные и поступательные пары, так как имеющиеся высшие кинематические пары могут быть заменены для каждого мгновенного положения механизма низшими.
а |
б |
Рис 2.4. Вращательная (а) и поступательная (б) кинематические пары: 1, 2 – звенья; 0 – стойка, R12 , R01 – реакция
Без учета сил трения сила взаимодействия между двумя звеньями (рис. 2.4) всегда направлена по нормали к поверхности их касания и, очевидно, во вращательной кинематической паре должна пройти через центр нулевой пары. Но неизвестными остаются величина силы и направление действия этой силы.
В поступательной паре сила взаимодействия между двумя звеньями перпендикулярна к оси движения х-х этой пары, т.е. известна линия действия этой силы, но неизвестна точка ее приложения и величина.
Таким образом, для каждой низшей кинематической пары при силовом расчете механизма получаем две неизвестные величины. Если число низших пар равно р5, то число неизвестных будет 2р5. Для каждого звена плоского механизма можно составить три уравнения статики. Если в механизме n звеньев, то можно составить 3n уравнений. Следовательно, чтобы кинематическая цепь была статически определимой, количество уравнений должно быть равно количеству неизвестных: 3n = 2p5. А этому условию удовлетворяют все кинематические цепи с нулевой степенью подвижности, называемые структурными группами Ассура.
17
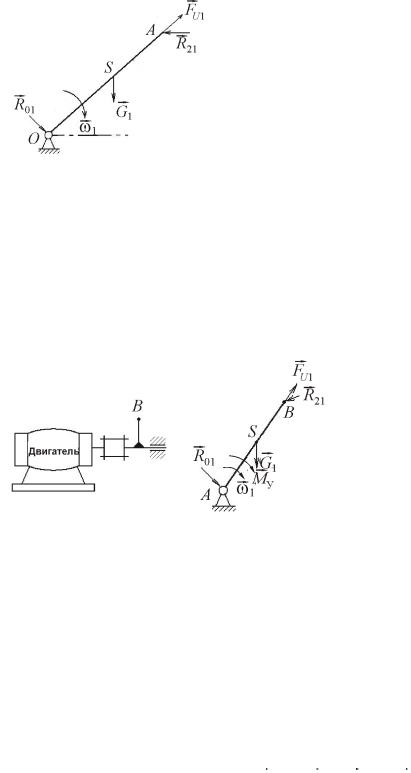
2.4.2.Силовой расчет ведущего звена
Вобщем случае на ведущее звено при равномерном егоr вращении действуют следующие силы: силы веса G1, сила инерции FU1, реакция от
стойки R01 и R21 со стороны отсоединенных структурных групп (рис. 2.5). В предыдущем разделе было установлено, что статически определимы только струк-
|
турные группы. Ведущее звено, входящее |
|
в кинематическую пару пятого класса со стой- |
|
кой, относится к механизму первого класса. |
|
Действительно, из формулы3n = 2p5 следует, |
|
что 3n – 2p5 = 3·1 – 2·1 = 1, т.е. число уравне- |
Рис. 2.5. Ведущее звено |
нийравновесий, которыемыможемсоставить, |
будет на единицу больше числа не известных, подлежащих определению. Для того чтобы имело место равновесие, необходимо дополнительно
ввести силу или пару сил, уравновешивающую силы, приложенные к ведущему звену. Как указывалось ранее, эта сила (момент пары сил) называется уравновешивающей (уравновешивающим моментом).
При анализе работы любой машины можно убедится в этом, так как к ведущему звену действительно приложены движущий момент или сила, которые приводят в движение рассматриваемую машину. Например, если главный вал рабочей машины соединен с валом двигателя посредством муфты, то для равновесия ведущего звена прикладывается уравно-
Рис. 2.6. Привод ведущего звена |
вешивающий момент |
M у |
|
(рис. 2.6). Если главный вал ра- |
|||
|
|||
бочей машины соединен с валом двигателя посредством зубчатой передачи, тоr для равновесия ведущего звена прикладывается уравновешивающая сила
Fy . На рис. 2.6 изображен привод ведущего звена передачи. Уравновешивающий момент или сила определяются из уравнения
моментов всех сил, действующих на звено АВ, относительно точки А: |
|
|
r |
v |
(2.9) |
M у = −[M A (G1) |
+ M A (R21)]µL . |
|
где µL – масштабный коэффициент длины звена. |
|
|
Реакция Rv01 вкинематическойпареАнаходитсяизуравненияравновесия |
||
n |
+ R21 + R01 = 0 . |
(2.10) |
∑F =F u1 + G1 |
||
i=1 1 |
|
|
18
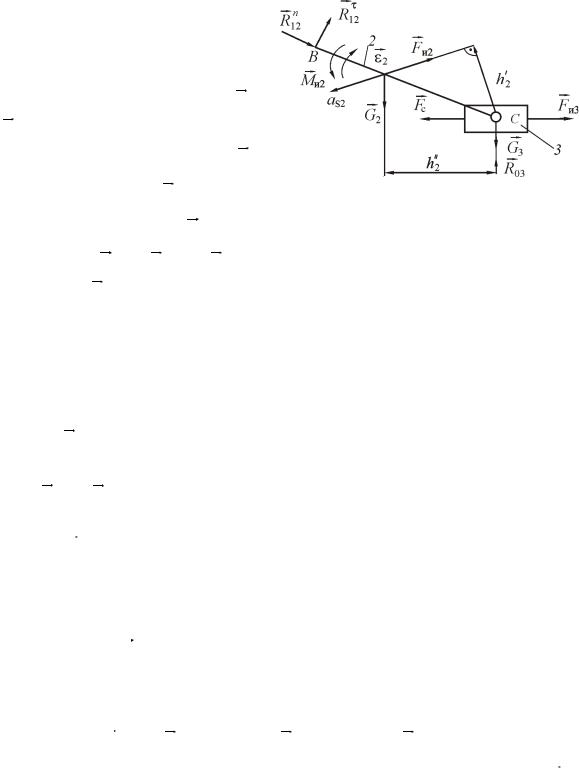
2.4.3. Определение реакций в кинематических парах структурной группы второго класса второго вида
Порядок рассмотрения групп при кинетостатическом расчете будет обратным порядку кинематического исследования. Рассматриваем структурную группу 22, состоящую из звеньев 2-3. Эта структурная группа со всеми действующими на нее силами, включая силы инерции, показана на рис. 2.7.
Действия отброшенных звень-
ев заменено действием реакций R03 |
|
и R12 , которые необходимо опре- |
|
делить. Разложим реакцию R12 |
|
на две составляющие: Rn12 , дейст- |
Рис. 2.7.Структурная группа 22 |
вующую вдоль звена ВС; Rτ12 , действующую перпендикулярно звенуВС.
При этом R12 = Rn12 + Rτ12 .
Реакция R03 будет проходить через центр шарнира С, так как все силы, действующие на звено 3, проходят через этот центр (без учета трения).
|
|
|
Таблица 2.2. |
|
|
|
|
||
Определяемая |
Составленное |
Рассматриваемое звено |
||
величина |
уравнение |
|||
|
||||
Rτ12 |
n r |
|
|
|
∑MC |
= 0 |
2 |
||
|
i=1 |
|
|
|
R12n и R03 |
n r |
|
|
|
∑F23 |
= 0 |
2 и 3 |
||
|
i=1 |
|
|
|
R23 |
n r |
|
|
|
∑F3 |
= 0 |
3 |
||
|
i=1 |
|
|
|
Далее приступаем к написанию развернутых уравнений равновесия
ик определению сил:
1.Величина Rτ12 (табл. 2.2) может быть непосредственно получена из уравнения равновесия, написанного для звена 2. Звено 2 находится под
действием следующих сил: веса G2 , результирующей силы инерцииFи2 ,
составляющих Rτ12 и Rn12 реакции R12 и реакции R32 , которой заменено действие отсоединенного звена 3. Так как направление реакции силы Rτ12
19
нам неизвестно, то при составлении уравнения моментов всех сил, действующих на звено 2 относительно точки С, задаемся произвольным знаком этой силы. Если величина силы окажется отрицательной, то ее направление должно быть выбрано противоположным.
n |
v |
(BC)µl −G2h2′′µl + Fи2h2′µl + Mи2 |
= 0 . |
(2.11) |
∑MС =Rτ12 |
||||
i=1 |
|
|
|
|
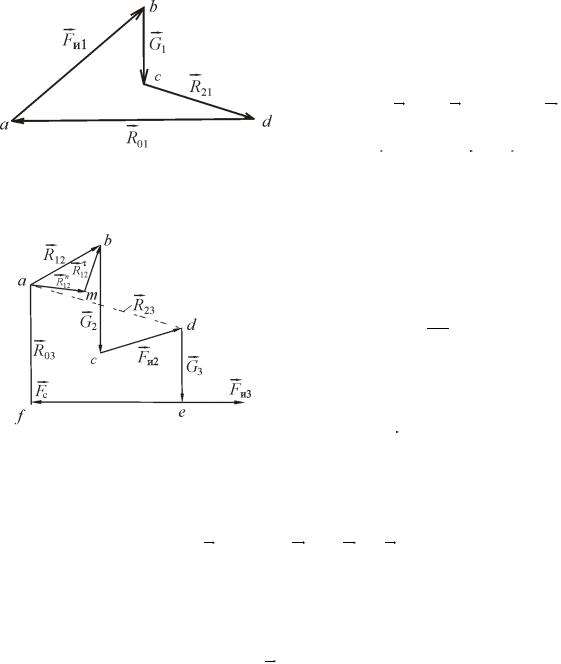
Согласно векторному уравнению (2.10) строим план сил (рис. 2.8).
2. Составляем уравнение равновесия структурной группы 22, приравнивая к нулю векторную сумму всех сил, действующих на группу:
n |
r |
r |
|
+ F и2 |
+ |
∑F |
=Rn12 + Rτ12 +G |
|
|||
i=1 |
23 |
|
2 |
|
|
Рис. 2.8. План сил ведущего звена |
+ F и3 +Gr3 + F с + F 03 = 0 . |
|
|||
(ab, bc, cd, da – вектора сил)
Построение плана сил для диады 22 показано на рис.(2.9).
Рис. 2.9. План сил структурной группы 22
Масштаб плана сил µf назначаем по максимальной приложенной силе.
Если наибольшая сила Fc, то
µF = Fefc [Н/мм].
Используя графоаналитический метод, рассчитываем полную реакцию в шарнире B (см. рис. 2.7):
R12 =µF (ab) .
Реакцию во внутренней кинематической паре определяем из условия равновесия звена 3 или звена 2:
n |
r |
=R23 |
r |
+ F и3 + F c + R03 = 0 . |
∑F |
+G |
|||
i=1 |
3 |
|
3 |
|
Так как при построении плана сил структурной группы 22 силы были сгруппированы по звеньям, то нового плана для звена 3 строить не требуется. Достаточно соединить конец R03 (точка а) с началом G3 (точка d),
чтобы получить реакцию R23 = −R32 :
R23 =µF (ad)
20