

книги / Элементы гидравлических систем и объёмного гидропривода
..pdfного сечения между полостями B и A, а также восстановлению давления на выходе гидроаппарата.
Регулировочный винт 12 с пружиной 11 предназначен для разгрузки канала A при нулевом расходе. Высоким давлением ЗРЭ 5 перемещается до упора в регулировочный винт 12, разъединяет полости B и A, но соединяет канал A через кромку 19 с гидролинией Y , а далее со сливом. Пружина 11 уравновешивает силу давления на торцовую поверхность 7.
2.3.4. Дроссели с пропорциональным управлением
Пропорциональные дроссельные клапаны Bosch Rexroth типа FES(E), 2/2V-CPV, QV1-4/2WV выполняются по схеме прямого и непрямого действия, приводятся в действие пропорциональным электромагнитом напряжением 24 В, рассчитаны на давление до
32 МПа и расход (1,3...300) 10−4 м3/с (8...1800 л/мин) .
На рис. 68 показан дроссель с пропорциональным управлением встраиваемого исполнения (серия TDL, Parker). Дроссель имеет трехступенчатую конструкцию, обеспечивающую большие расходы при высоком быстродействии и точности. Поток управления X от входа в гидроаппарат через демпфер поступает к управляющей ступени, а на слив жидкость отводится по гидролинии Y. Электромагнит воздействует на золотник управляющей ступени с усилием, пропорциональным току управления. Золотник центрируется двумя пружинами. Управляющая ступень обеспечивает пропорциональное положение поршня второй ступени и, соответственно, жестко связанного с ЗРЭ дросселя третьей ступени. Расход рабочей жидкости из гидролинии B в гидролинию A устанавливается пропорциональным входному электрическому сигналу.
Фактическое положение поршня и ЗРЭ дросселя постоянно контролируется датчиком обратной связи.
В случае прекращения электропитания гидроаппарат автоматически запирается под воздействием усилия пружины и давления от управляющей ступени на поршень.
161
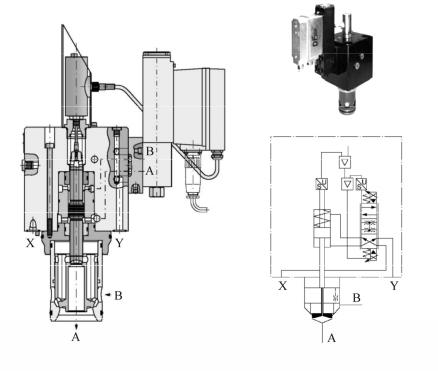
Рис. 68. Конструктивная схема, внешний вид и условное обозначение дросселя с пропорциональным управлением
Существуют конструкции дросселей с пропорциональным управлением, в которых управляющее воздействие от электромагнита передается непосредственно ЗРЭ дросселя без использования дополнительных усилительных элементов.
2.3.5. Регуляторы расхода с пропорциональным управлением
Регуляторы расхода с пропорциональным управлением обеспечивают дистанционное регулирование расхода и скорости выходного элемента гидродвигателя. Конструктивная схема двухлинейного регулятора расхода с пропорциональным управлением показана на рис. 69.
162
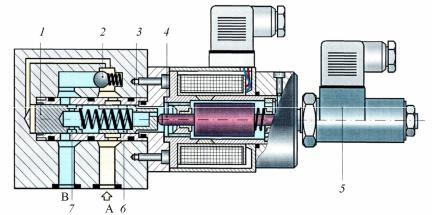
Рис. 69. Конструктивная схема двухлинейного регулятора расхода с пропорциональным управлением
Входной электрический сигнал поступает на электромагнит, якорь 4 которого управляет золотником дросселя 1. Открытие дросселя, задаваемое положением проточки 7, и, соответственно, расход пропорциональны току управления. Редукционный клапан 3 прямого действия обеспечивает постоянство перепада давления на дросселе независимо от изменения давления нагрузки. Регулятор имеет обратную связь по положению ЗРЭ дросселя, обеспечиваемую датчиком обратной связи 5 и повышающую точность обработки входного сигнала.
При отсутствии входного электрического сигнала пружиной 6 перемещается в крайнее правое положение ЗРЭ 3 дросселя перекрывает рабочее проходное сечение. Расход рабочей жидкости через гидроаппарат отсутствует.
Обратный клапан 2 пропускает жидкость в обход дросселя через проточку 7 при изменении потока жидкости на противоположное направление.
Пропорциональная зависимость расхода от сигнала управления обеспечивается статическими характеристиками электронного блока управления, электромагнитов и пружин, которые близки к линейным характеристикам.
163
3.ЭЛЕКТРИЧЕСКИЕ ЭЛЕМЕНТЫ
ВГИДРАВЛИЧЕСКИХ ПРИВОДАХ
Электрические элементы в составе гидропривода предназначены для преобразования электрических сигналов в сигналы неэлектрической природы и наоборот. К таким элементам относятся электромагниты с линейным и угловым перемещением якоря, реле давления, конечные выключатели, электромеханические преобразователи, электрические датчики давления, температуры, уровня жидкости, индукционные расходомеры и др.
3.1. Электромеханические преобразователи
Электромеханические преобразователи (ЭМП) [7, 11, 17] предназначены для преобразования электрического сигнала управления в пропорциональное механическое перемещение якоря, к которому присоединяется подвижный элемент (ЗРЭ или РКЭ) дросселирующего гидрораспределителя. Электромеханический преобразователь может быть, например, составной частью конструкции электрогидравлического усилителя.
По принципу действия различают ЭМП пьезоэлектрические, магнитострикционные, электродинамические и электромагнитные. Наиболее широкое применение в устройствах гидроавтоматики нашли ЭМП электродинамического и электромагнитного типа.
Подвижный элемент ЭМП (якорь или катушка) может совершать поступательное или поворотное движение относительно неподвижного элемента при взаимодействии магнитных полей различной природы. По наличию поляризующего магнитного поля и его виду существуют преобразователи неполяризованные, поляризованные с постоянными магнитами и поляризованные с обмотками поляризации. Работа поляризованных ЭМП основана на взаимодействии якоря с магнитными потоками в рабочих зазорах. Магнитные потоки создаются поляризующими устройствами и изменяются за счет алгебраического сложения с магнитным потоком, формируемым токами в обмотках управления. Поляризованные преобразователи некри-
164
тичны к схеме подключения электронного усилителя, имеют статическую характеристику, близкую к линейной характеристике, которую можно корректировать путем изменения формы зазора между якорем и статором, обеспечивают идентичность характеристик.
Электрические соединения могут формироваться из обмоток, включенных по трехпроводной дифференциальной или двухпроводной схеме. Преобразователи, выполненные по трехпроводной дифференциальной схеме, имеют меньшую потребляемую мощность, но потребляют ее при отсутствии управляющего сигнала, поступающего от электронного усилителя с дифференциальным выходом. Для получения одинаковых характеристик необходима высокая точность регулировок.
Управление ЭМП обеспечивается непрерывным сигналом (постоянный ток) или дискретным сигналом релейного или импульсного вида.
Преобразователи, у которых электромагнитная система отделена от гидросистемы, принято условно называть сухими, а при отсутствии герметизации – жидкостно-заполненными.
К основным характеристикам электромеханического преобразователя относятся статическая характеристика – зависимость перемещения якоря от тока управления, и силовая характеристика – зависимость электромагнитной силы (момента), приложенной к якорю, от тока управления при фиксированном смещении якоря из нейтрального положения. Максимальная электромагнитная сила определяется при среднем (начальном) положении якоря и максимальном токе управления.
Максимальная мощность управления соответствует мощности, потребляемой ЭМП при максимальном токе управления и максимальном отклонении якоря от среднего положения.
Принцип действия ЭМП электродинамического типа основан на взаимодействии магнитного потока, возникающего при поступлении управляющего сигнала в обмотки управления, с постоянным магнитным потоком, создаваемым постоянными магнитами или с помощью обмоток возбуждения (подмагничивания).
165
Конструктивная схема ЭМП электродинамического типа с двумя обмотками управления и одной обмоткой возбуждения показана на рис. 70.
xя
8 |
1 |
|
Iу |
2 3 |
= Uп |
4 |
5 6 7 |
|
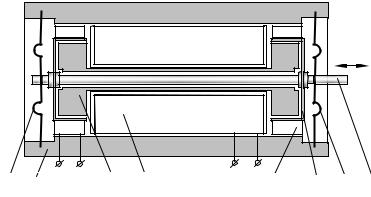
Рис. 70. Конструктивная схема электромеханического преобразователя электродинамического типа
Преобразователь состоит из корпуса 1, в который помещен статор 2 с обмоткой подмагничивания 3, двух обмоток управления 4 на подвижных катушках 5. Катушки с обмотками управления концентрично размещены в рабочих зазорах статора с помощью центрирующих пружин 6 и 8, которые соединяются с катушками посредством якоря 7. Пружины имеют высокую жесткость в радиальном направлении и низкую жесткость в осевом направлении благодаря особой конструкции.
Обмотка подмагничивания 3, на которую подается постоянное напряжение подмагничивания Uп, создает в зазоре статора магнит-
ное поле. При прохождении через обмотки 4 тока управления Iу на
них будет действовать электромагнитная сила, пропорциональная току управления и активной длине проводника обмотки. Перемещение якоря xя будет определяться величиной электромагнитной силы и жесткостью центрирующих пружин 6 и 8. Жесткость пружин вы-
166
бирается такой, чтобы в заданном диапазоне смещения якоря статические характеристики были близки к линейным характеристикам.
Нагрузка, воспринимаемая якорем, определяется зависимостью
Fя = kF i −cx xя |
или |
Tя = kT i −cϕϕя, |
(45) |
i |
|
i |
|
где Fя – внешняя сила на якорь; kF |
– коэффициент силовой харак- |
||
|
i |
|
|
теристики; i – ток управления; |
cx – жесткость центрирующих пру- |
||
жин; xя – линейное перемещение якоря; Tя – внешний момент на якорь; kTi – коэффициент моментной характеристики; cϕ – жесткость центрирующих пружин; ϕя – угловое перемещение якоря, рад.
При пренебрежении жесткостью центрирующих пружин уравнения (45) примут вид
Fя = kF i |
или Tя = kF i. |
(46) |
i |
i |
|
Основным достоинством электродинамических преобразователей является отсутствие в их статических характеристиках петли магнитного гистерезиса. Статор изготавливается из недорогой электротехнической стали.
К недостаткам таких преобразователей относится наличие обмотки подмагничивания с непроизводительным потреблением энергии, выделением тепла, которое необходимо отводить и возможностью обрыва проводников. Якорь преобразователя чувствителен к линейным ускорениям вдоль оси перемещения. Корпус преобразователя заполнен рабочей жидкостью, что способствует осаждению из нее в рабочем зазоре металлических магнитных частиц и коррозии деталей, обусловленной возможным наличием влаги. Кроме того, электродинамические преобразователи имеют повышенную массу и габариты. Некоторые недостатки можно ликвидировать заменой обмотки подмагничивания постоянными магнитами.
Электродинамические преобразователи находят применение в гидроагрегатах, к которым не предъявляются высокие требования к массогабаритным и динамическим характеристикам, а определяю-
167

щими факторами являются линейность без гистерезиса статической характеристики и низкая стоимость.
Принцип действия электромагнитных преобразователей основан на взаимодействии магнитных потоков, из которых один или несколько образуются при подаче управляющего сигнала. В результате такого взаимодействия возникает усилие (момент) на якоре. При наличии механической или магнитной пружины это усилие (момент) преобразуется в линейное (угловое) перемещение подвижной части ЭМП, пропорциональное управляющему сигналу.
При отклонении якоря из нейтрального положения возможно действие магнитной силы, направленной в сторону, противоположную действию основной электромагнитной силы. Наличие и величина противодействующей магнитной силы зависят от формы рабочего зазора между статором и якорем, а также жесткости электромагнитной пружины cЭМП .
Возможные формы рабочих зазоров показаны на рис. 71. Жесткость электромагнитной пружины для зазора на рис. 71, б меньше, чем на рис. 71, а. Зазор, представленный на рис. 71, в полностью исключает наличие электромагнитной пружины (cЭМП = 0). Поэтому
для обеспечения пропорциональности перемещения якоря току управления в конструкцию ЭМП необходимо введение центрирующей механической пружины.
|
1 |
1 |
1 |
|
|
|
|
|
2 |
2 |
2 |
а |
б |
|
в |
Рис. 71. Формы рабочих зазоров ЭМП: 1 – статор; 2 – якорь
168
Для статической и силовой характеристики электромагнитных преобразователей характерно наличие петли магнитного гистерезиса, что связано с перемагничиванием материала якоря в процессе работы. Ширина петли зависит от материала, используемого при изготовлении якоря. Обычно это магнитомягкий материал.
В пределах рабочих смещений якоря и при определенных допущениях статическую и силовую характеристики ЭМП можно линеаризовать. Линеаризованное уравнение обобщенной статической характеристики примет вид
F |
= k |
F |
i −c |
x |
или T |
= k |
i −c |
ϕ |
я |
, |
(47) |
я |
|
ЭМП |
я |
я |
T |
ЭМП |
|
|
|
||
|
|
i |
|
|
|
i |
|
|
|
|
|
где cЭМП, cЭМП – жесткость электромагнитной пружины при посту-
пательном и поворотном движении якоря соответственно.
Работа электромагнитных дифференциальных преобразователей основана на взаимодействии ферромагнитного якоря с двумя электромагнитами, каждый из которых имеет по одной обмотке управления, ток в которых изменяется дифференциально. Статор и якорь изготавливаются из дорогостоящих пермаллоев. Статическая характеристика нелинейная, особенно при больших смещениях якоря. Однако простота и технологичность изготовления привели к их широкому распространению.
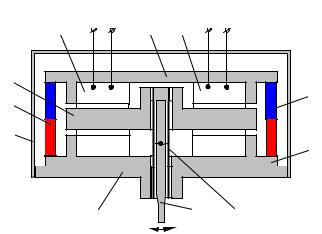
На рис. 72 представлен поляризованный преобразователь с постоянными магнитами. Электромагнитная система защищена от воздействия окружающей среды кожухом 1, а внутренняя полость преобразователя не заполнена рабочей жидкостью. Герметизация обеспечивается тонкостенной полой трубкой 6, которая также выполняет функцию центрирующей пружины и частично компенсирует силу, обусловленную жесткостью магнитной пружины. Сердечники статора 5, между которыми размещаются два постоянных магнита 2, крепятся на корпусе 8. Якорь 3 по плотной посадке надевается на тонкостенную трубку 6, которая противоположным концом запрессовывается в корпус 8. Ток управления подается в обмотки 4, создающие магнитные потоки управления, взаимодействующие с постоянным
169
I |
у |
5 |
I |
у |
4 |
|
4 |
|
|
3 |
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
1 |
|
|
O |
5 |
|
|
|
||
|
|
|
|
|
8 |
|
ϕя |
7 |
6 |
|
|
|
|
Рис. 72. Конструктивная схема ЭМП электромагнитного типа
магнитным потоком, формируемым магнитами 2. На якорь 3 действуют электромагнитные силы, приводящие к его повороту относительно центра О на угол, пропорциональный току управления. Статические характеристики близки к линейным и имеют сравнительно большую крутизну. Преобразователь технологично присоединяется к гидроусилителю сопло-заслонка, так как якорь 3 одновременно является и заслонкой 7, имеет малые массогабаритные характеристики, но и относительную сложность конструкции и технологии изготовления.
3.2. Электрогидравлические усилители мощности
Электрогидравлический усилитель мощности (ЭГУ) предназначен для преобразования электрического сигнала в пропорциональный ему расход (давление) рабочей жидкости, подводимый к исполнительному механизму. В процессе преобразования небольшая мощность входного сигнала значительно усиливается с помощью энергии подводимой рабочей жидкости.
Типы, основные параметры и размеры ЭГУ, его название на английском языке (Electrohudraulic servovalve – электрогидравлический сервовентиль) регламентированы ГОСТ 13375–84.
170