

2654
.pdfНаибольшим удобством в задании спиралей отличается
цилиндрическая система координат и ее частный случай - полярная система.
Переход к декартовой системе приведет к заданию кривой в параметрической форме
(1)
Во всех последующих вычислительных действиях будем предполагать форму задания в виде (1). Пусть, например, в этой форме задано ребро возврата торса. Уравнение касательной к кривой будет иметь вид
(2)
где |
- координаты текущей точки; |
|
|
|
- производные по параметру, вычисляемые в текущей |
|
точке. |
Направляющие косинусы касательной определены из уравнения (2).
Если на начальной касательной, соответствующей некоторому
значению параметра |
отметать отрезок длиной d (рис. 2), то получим |
|
|
параметрическое уравнение эвольвенты |
|
|
(3) |
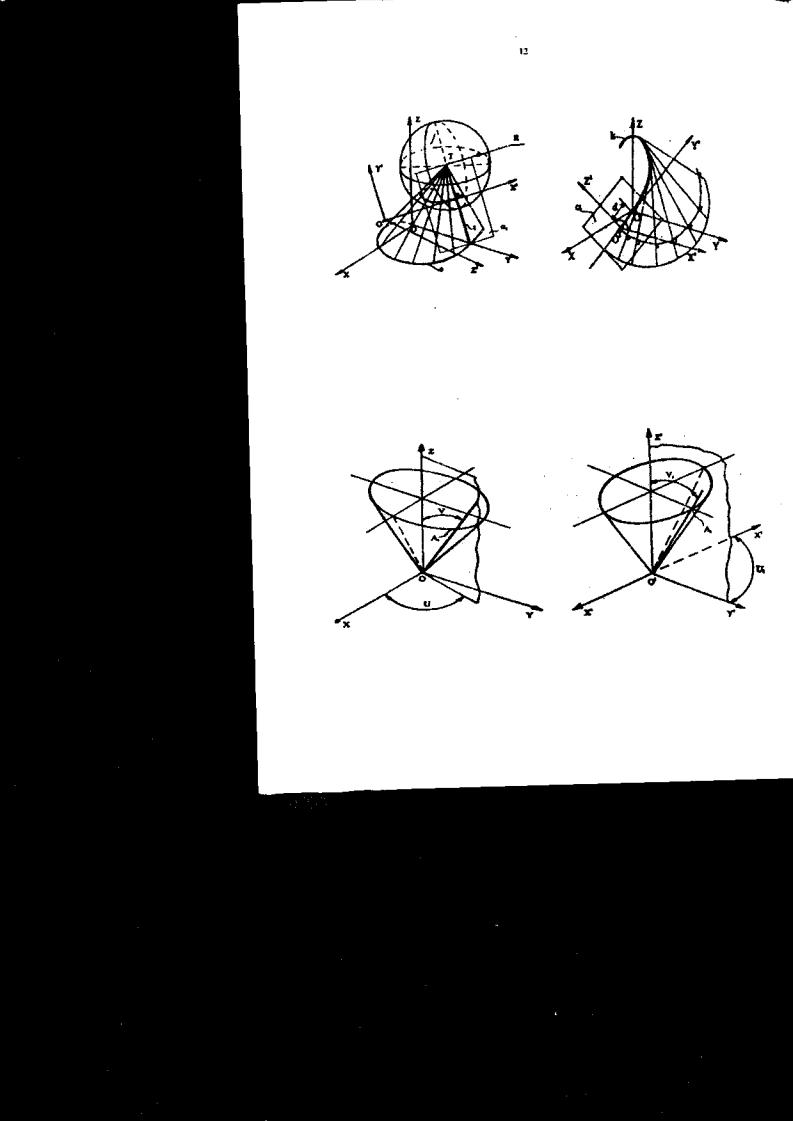
Рис.2
Рис.1
Рис.З |
Рис.4 |
13
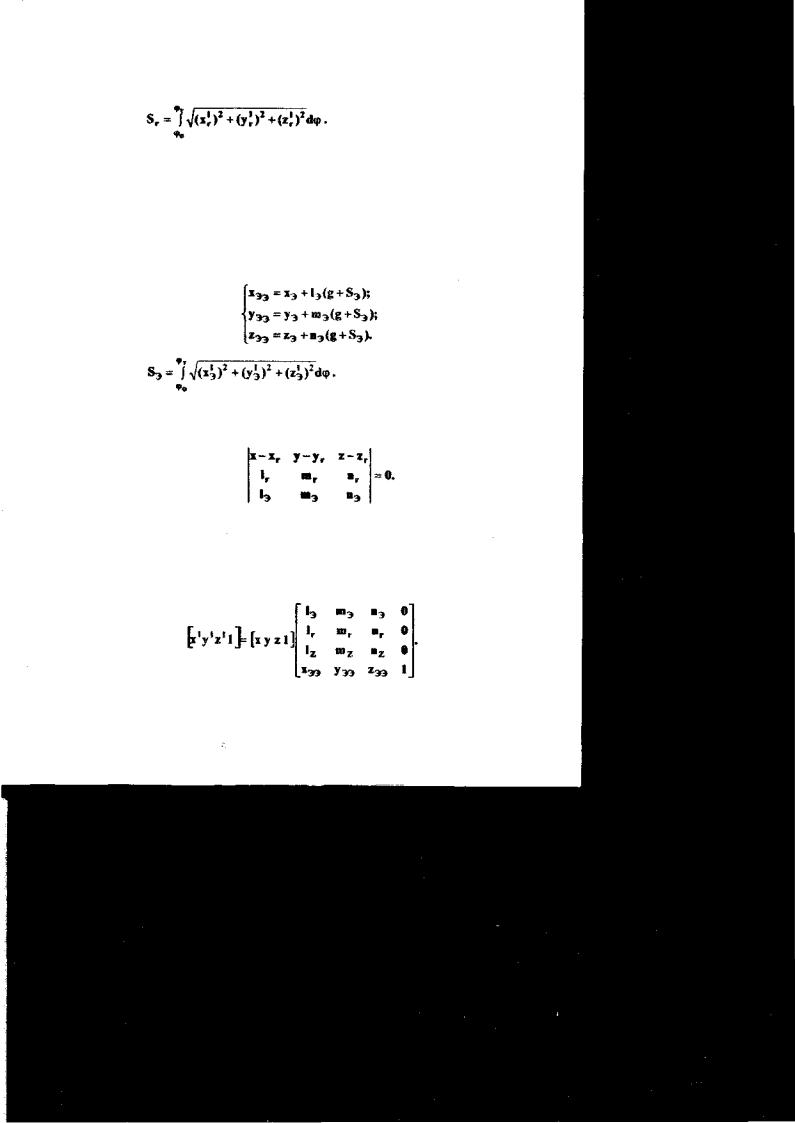
где
Для выявленной эвольвенты необходимо в свою очередь определить эвольвенту - траекторию перемещения начала координат (О1) подвижной системы. Уравнение касательной к кривой, определяемой уравнениями (3), будет иметь вид, аналогичный (2), что позволит определить Iэ, mэ, nэ
Тогда, по аналогии с (2), можно уже определить координаты перемещающейся точки О1 в функции параметра:
(4)
где
Уравнение касательной плоскости торса в параметрической форме будет иметь вид
(5)
Из этого выражения могут быть получены формулы для определения направляющих косинусов нормального вектора плоскости Iz , mz , nz .
Итоговое преобразование в однородных координатах в матричной форме может быть записано в виде
(6)
14
Оперируя этим преобразованием, можно создать ротативные линии и поверхности по схемам, предложенным в первой главе.
Аналитические алгоритмы, связанные с качением торсовых поверхностей, базируются на следующем. Пусть заданы две конические поверхности, каждая из которых помещена в собственную правую ортогональную декартову систему координат: первая - в систему Охуz
(рис. 3), а вторая - в систему O1 x1 y1 z1 (рис. 4). Параметром, выделяющим Произвольную образующую конуса, выберем величину угла, составляемого плоскостью, проходящую через ось Oz с плоскостью xOz - U. Уравнение такой плоскости имеет вид
y = tgUx (7) Пусть уравнение направляющей кривой конической поверхности
задано в параметрическом виде
x= f1 (Р)
y= f2 (P)
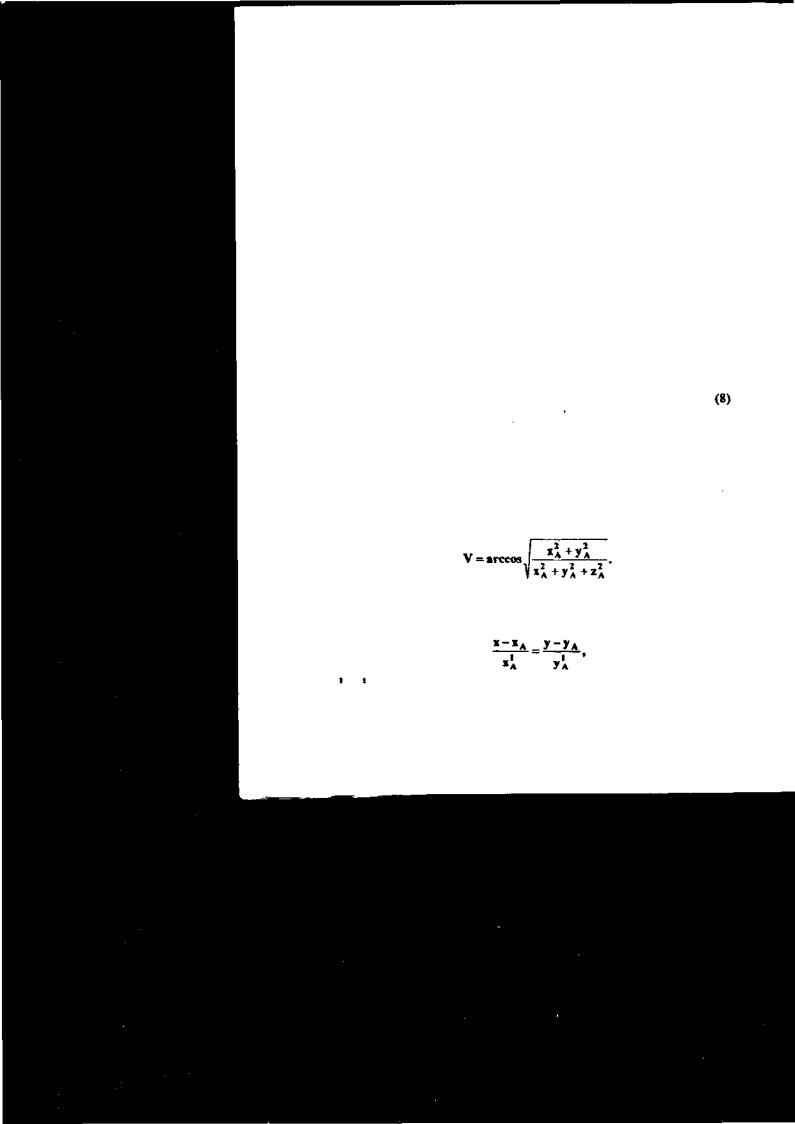
Совместное решение (7) и (8) позволит определить координаты некоторой точки А1 — ХА, уА, ZA и направляющие косинусы образующей, выделяемойплоскостью,котораяопределяетсявыражением(7)-IА,mA ,nА ,
Значение угла наклона образующей к оси Oz определится выражением
(9)
Помимо этого, наличие координат точки A1 позволяет определить касательную к кривой, которая будет иметь уравнение
(10)
где х1A , y1A - производные по параметру, вычисленные в точке Аi.
15
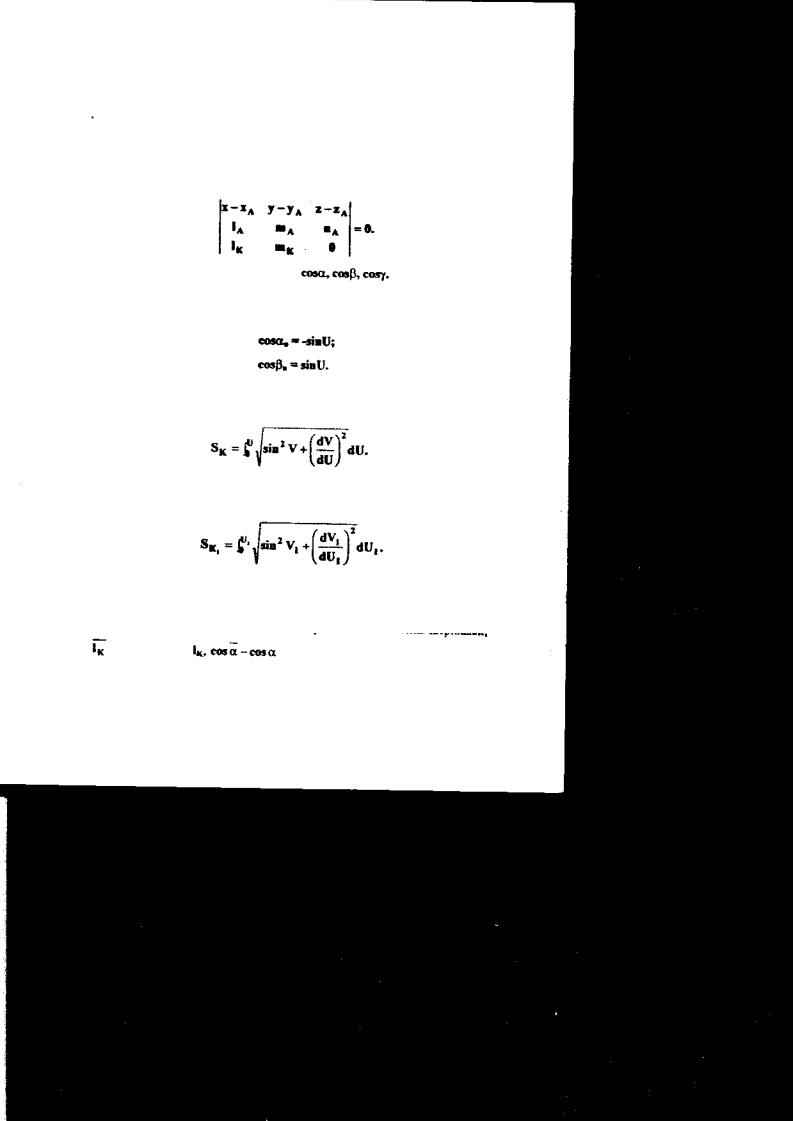
Уравнениепозволяетопределитьинаправляющиекосинусы -Ik,mk,
nk.
Плоскость, касательная к конусу в точке Ai , проходящей через выделенную образующую и касательную к направляющей кривой, может быть определена выражением
(11)
Из соотношения (11) определяются
Направляющие косинусы нормали такой плоскости касательной конуса
(12)
Длина дуги, полученной в пересечении с первым конусом при параметризации величиной U, определится выражением
(13)
Выражение для длины дуги кривой, полученной в пересечении со вторым конусом, имеет вид
(14)
Приравнивая (13) и (14), можно определять соответствие величин U1
и U. Тогда выражения для конуса изгибания будут иметь вид, аналогичный
(9) - (11). Буквенные обозначения в этих выражениях снабжены штрихами т.е. соответствует и т.д.
16
Рассмотрим теперь соприкосновение конических поверхностей и ориентацию системы координат перемещаемого конуса по отношению к системе исходного.
Угол между плоскостью, выделяющей образующую, которая определяется углом U и касательной плоскостью, определяется углом между нормалями плоскостей. Для исходного конуса будем иметь
(15)
Аналогичное выражение получим для катящегося конуса:
(16)
Выражения (15) и (16) позволяют считать суммарное значение углов
величиной известной:
(17)
Величина угла N3 может быть определена по соотношению
(18)
Последующие вычислительные действия сводятся к определению направляющих косинусов осей перемещаемой системы координат по
отношению к неподвижной. Формулы для вычисления приведены только применительно к оси O1z1.
Угол между сторонами |
определяется выражением |
|
(19) |
Значение направляющего косинуса оси O1 z1 к оси
Направляющий косинус оси O1z1 по отношению к оси Oz определяется соотношением
(20)
Значение третьего направляющего косинуса можно найти т формулы
(21)
17
Для остальных осей величины направляющих косинусов указаны без промежуточных соотношений:
для оси О1x1 (22)
где
(23)
где
(24) Для оси О1у1 (25)
где
(26)
18
(27)
Выявленные значения направляющих косинусов осей перемешаемой системы позволяют определить ротативное преобразование пространства для произвольно выбранных конусов. При этом все выражения являются функциями одного параметра и преобразования пространства в матричной форме могут быть записаны в виде
(29)
В третьей главе на основе геометрических алгоритмов и аналитических зависимостей, приведенных в первой и второй главах, рассмотрены программные алгоритмы реализации изгибаний торсовой поверхности по заданному направляющему конусу. Будем считать, что отсек исходной торсовой поверхности задан в виде дискретного набора отрезков образующих, координаты концевых точек которых x1i,y1i,z1i и x2i , y2i , z2i . Причем одна из концевых точек отрезка образующей (пусть точка с координатами x1i,y1i,z1i )лежит на ребре возврата торсовой поверхности.
Направляющий конус зададим в виде определителя, в геометрическую часть которого входит плоская кривая I, лежащая в горизонтальной
плоскости. Кривая I конструировалась как кубический сплайн.
Так как исходная торсовая поверхность задана в виде дискретного набора образующих, то в уравнениях, описывающих координаты точек ребра возврата торса, для удобства численного интегрирования целесообразно перейти от интегралов к конечным разностям. В качестве параметра р выберем порядковый номер образующей. Следовательно, параметр р принимает только целые значения и разность Таким
образом для координат ребра возврата можно записать следующие соотношения
(30)
где
Обозначим через а, образующие исходной торсовой поверхности, а
через mi -образующие задаваемого направляющего конуса. Пусть имеем
образующую n торса я соответствующую |
ей образующую mi , |
направляющегоконуса. Углымеждупрямыми ni |
и ni+1 , mi и mi+1 равны,так |
как являются инвариантами изгибания. Обозначим
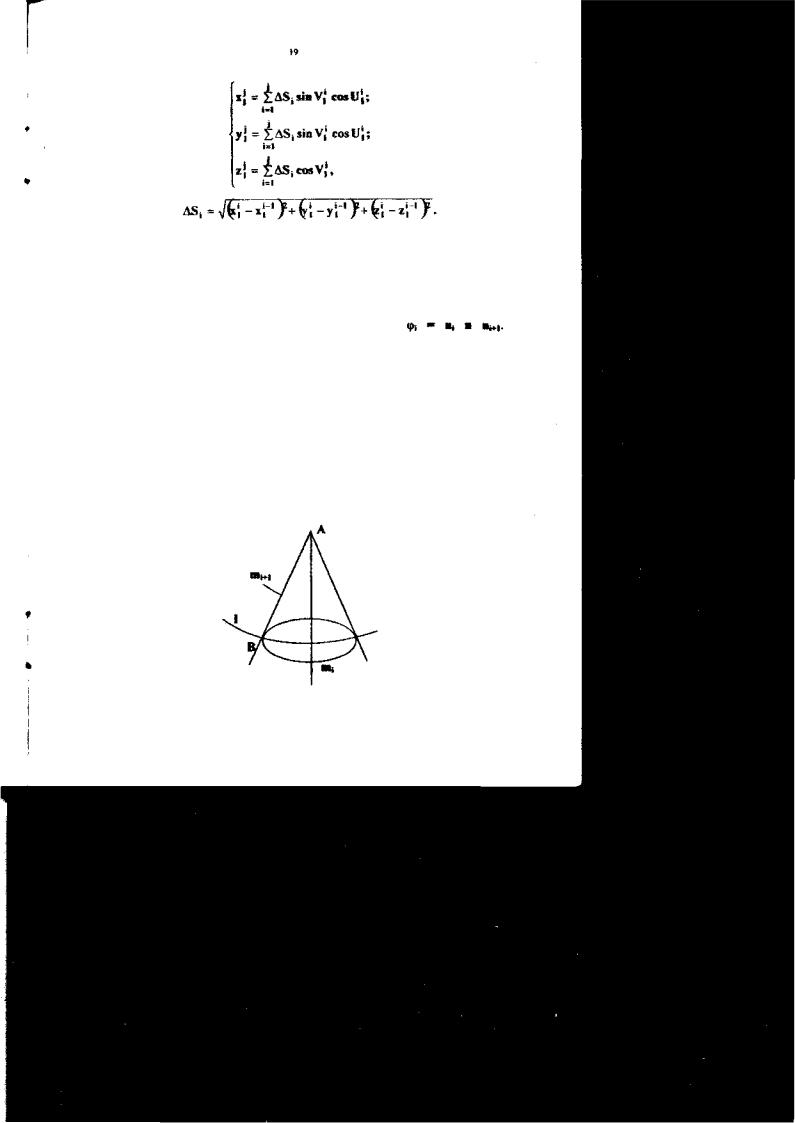
Организуем круговой конус с вершиной в точке А, осью которого является прямая mi , и образующие составляют с осью угол ф. Определим точки пересечения построенного конуса с кривой 1. Таких точек будет несколько. Выберем ближайшую в направлении движения по кривой 1 и обозначим ее через В (рис. 5), координаты этой точки xB , yB , 0 (zB = 0 , так как кривая I лежит в горизонтальной плоскости проекций). Таким образом, точки А и В определят образующую mi+1 направляющего конуса, соответствующую ni+1
образующей исходной торсовой поверхности.
Рис.5
20
Рассмотрим укрупненную блок-схему алгоритма вычисления и визуализации изгибаний. Пусть F - файл, содержащий координаты концевых точек отрезка образующей исходной торсовой поверхности.
Блок-схема алгоритма приведена на рис. 6.
1.Открыть файл F для чтения.
2.Считать запись из файла F.
3.Задать направляющий конус (задается кривая I и точка А).
4.Условие: если достигнут конец файла F, то вычисление ведется по ветви "Да", иначе - по ветви "Нет".
5.Считать запись из файла F.
6.Определить уравнение образующей направляющего конуса.
7.Вычислить углы U и V образующей направляющего конуса.
8.Вычислить координаты ребра возврата в изгибании.
9.Изобразить образующую торса в изгибании.
10.Закрыть файл F.
Таким образом, на основе использования предложенного программного обеспечения открываются большие возможности в области создания и анализа пространственных покрытий ,для зданий и сооружений. Многопараметрическое множество создаваемых отсеков на 5азе пакета прикладных программ и возможность их использования при создании составных покрытий дает архитектору свободу оперативного проектирования вариантов, которые, благодаря современному техническому и аналитическому обеспечению, позволяют вести проектные работы на высоком уровне. Предложенный пакет прикладных программ был использован на этапе эскизного проектирования при разработке покрытий: торгового центра в г. Каменске и водно-спортивного комплекса в г. Ростове-на-Дону. Примеры покрытия этих сооружений представлены на рис. 7 и 8 соответственно.