

LR1_YTS / Новиков_ЛР1
.pdfМинистерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
«Московский государственный технический университет имени Н.Э. Баумана
(национальный исследовательский университет)» (МГТУ им. Н.Э. Баумана)
Кафедра СМ-9 «Многоцелевые гусеничные машины и мобильные роботы»
Отчёт
по лабораторной работе №1
по курсу «Управление техническими системами»
по теме: «Основы анализа систем автоматического управления (САУ) в пакете MATLAB»
Выполнил: _________________________________ (Новиков А.Д.)
Студент группы СМ9-71
Принял: ___________________________________ (Бузунов Н.В.)
Москва 2023 г.
|
Содержание |
|
1 Теоретическая часть............................................................................................ |
3 |
|
2 Практическая часть ............................................................................................. |
4 |
|
2.1 |
Нахождение нулей и полюсов ................................................................... |
4 |
2.2 |
Построение графиков АФЧХ ..................................................................... |
5 |
2.3 |
Построение графиков ЛАЧХ ..................................................................... |
7 |
2.4 |
Построение графиков АЧХ И ФЧХ........................................................... |
7 |
2.5 |
Исследование САУ ..................................................................................... |
8 |
2.6 |
Построение модели ................................................................................... |
10 |
Заключение ............................................................................................................ |
15 |
|
2
1 Теоретическая часть
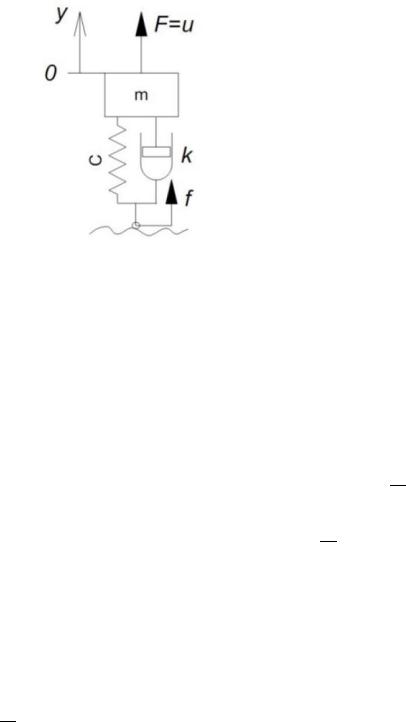
Рисунок 1 – Расчетная схема системы подрессоривания Дифференциальное уравнение движения для схемы (рисунок 1):
̇ |
(1) |
̈+ ̇+ = + + , |
где − масса, принимается равной 500 кг;
− координата, м;
− коэффициент демпфирования, принимается равным 2000 Нсм ;
− жесткость пружины, принимается равным 50000 мН2;
− силовое воздействие, Н;
− кинематическое воздействие, м.
Запишем |
данное |
уравнение |
с |
помощью |
оператора |
дифференцирования p = :
(2 + + ) = + ( + ), |
(2) |
Передаточная функция относительно силового воздействия :
3
( ) = |
|
1 |
, |
(3) |
|
|
|||
|
|
|||
|
2 |
+ + |
|
|
|
|
|
Передаточная функция относительно кинематического воздействия :
( ) = |
+ |
, |
(4) |
|
|
|
|||
|
|
|||
|
2 |
+ + |
|
|
|
|
|
||
2 Практическая часть
2.1 Нахождение нулей и полюсов
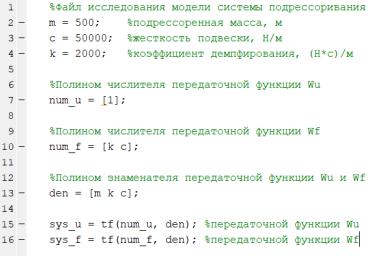
Введем исходные данные для решения нашей задачи в исполняемый файл программного комплекса Matlab (рисунок 2):
Рисунок 2 – Исходные данные для ПО Matlab
Для получения передаточных функций применяется операция tf(). Для нахождения нулей и полюсов используются функции zero() и pole()
соответственно. В результате выполнения этого файла в рабочей области
Matlab создаются переменные sys_u и sys_f, содержащие соответствующие передаточные функции рассматриваемой системы. В результате поиска нулей и полюсов исследуемых функций получаются следующие значения
(рисунок 3, 4):
4
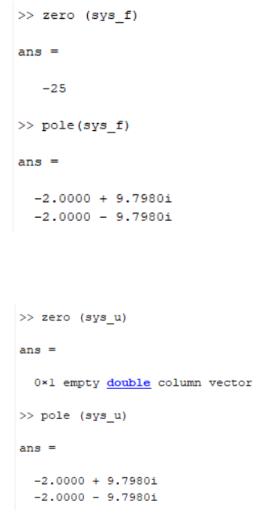
Рисунок 3 – Нули и полюса передаточной функции
Рисунок 4 – Нули и полюса передаточной функции
2.2 Построение графиков АФЧХ
Вызвав функцию nyquist (), построим амплитудно-фазовые частотные характеристики (АФЧХ) для обеих передаточных функций и (рис. 5,
6):
5
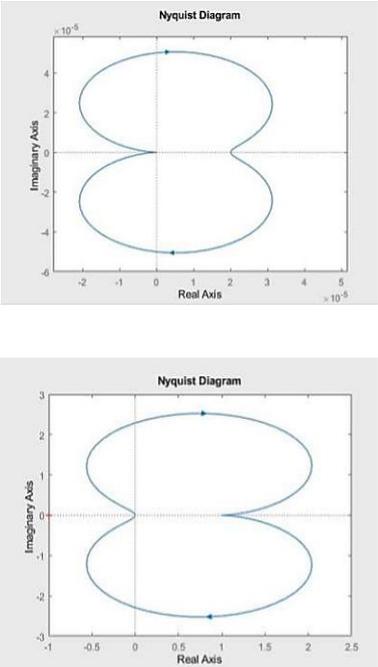
Рисунок 5 – АФЧХ для
Рисунок 6 – АФЧХ для
2.3 Построение графиков ЛАЧХ
Для построения логарифмических амплитудных частотных (ЛАЧХ) и
фазовых частотных (ЛФЧХ) характеристик используется функция bode() для передаточной функции (рис. 7):
6
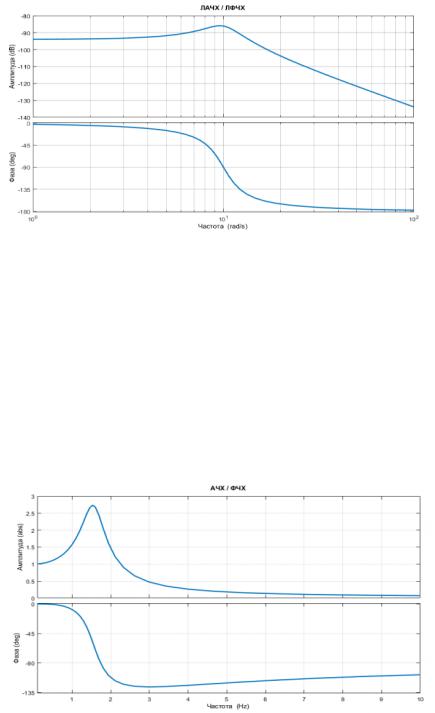
Рисунок 7 – ЛАЧХ и ЛФЧХ для
2.4 Построение графиков АЧХ И ФЧХ
Для построения амплитудных частотных (АЧХ) и фазовых частотных
(ФЧХ) характеристик используется функция bode() для передаточной функции (рис. 8):
Рисунок 8 – АЧХ и ФЧХ для
2.5 Исследование САУ
Для исследования САУ во временной области используются функции step() и impulse(). Step() позволяет определить отклик системы на единичное ступенчатое воздействие (переходную функцию), а impulse() – определить
7
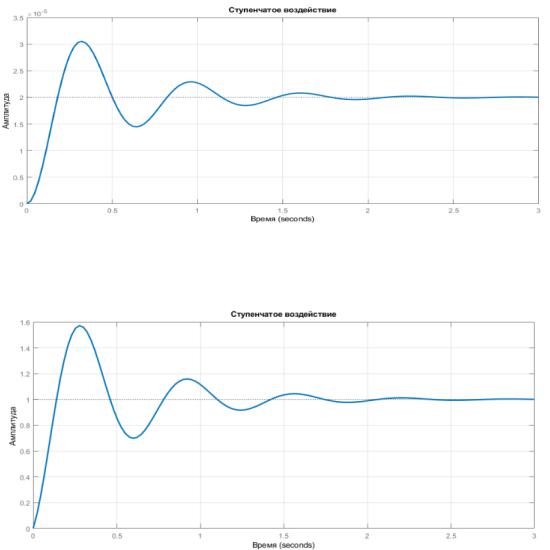
отклик системы на единичное импульсное воздействие (весовую функцию).
Сначала используем функцию step() применительно к обеим передаточным функциям и (рисунки 9, 10) соответственно:
Рисунок 9 – Воздействие ступенчатой функции на систему с передаточной функцией
Рисунок 10 – Воздействие ступенчатой функции на систему с передаточной функцией
Затем используем функцию impulse() применительно к обеим передаточным функциям и (рисунки 11, 12) соответственно:
8
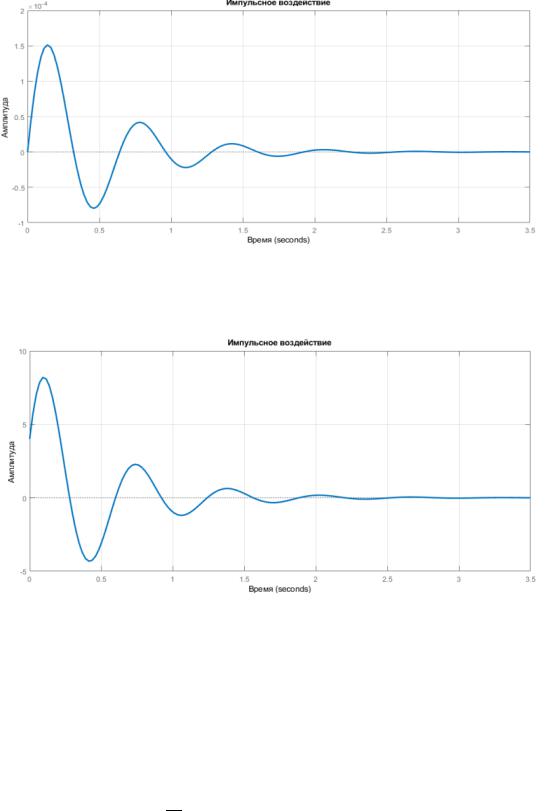
Рисунок 11 – Воздействие импульсной функции на систему с передаточной функцией
Рисунок 12 - Воздействие импульсной функции на систему с передаточной функцией
На данных рисунках видно, что система совершает около трех колебаний до положения равновесия. Такой случай не является оптимальным для колесных машин. В связи с этим подбирается оптимальный коэффициент демпфирования = 5500 Нсм . Тогда графики для обеих передаточных функций и (рисунки 13, 14) будут выглядеть следующим образом:
9

Рисунок 13 – Реакция системы с передаточной функцией на
единичное ступенчатое воздействие при = 5500 Нсм
Рисунок 14 – Реакция системы с передаточной функцией на
единичное ступенчатое воздействие при = 5500 Нсм
2.6 Построение модели
Для исследования САУ используем ПО Matlab Simulink. Воспользуемся расчетной схемой, изображенная на рисунке 12. Рассмотрим поведение системы при различных воздействующих функциях: SinWave (рисунки 15, 16),
Step (рисунки 17, 18), Impulse (рисунки 19, 20).
10