

Підручник Гідравлічні та аеродінамічні машіни
.pdf3. ОСНОВИ ТЕОРІЇ ЛОПАТЕВИХ НАСОСІВ. ХАРАКТЕРИСТИКИ ВІДЦЕНТРОВИХ НАСОСІВ
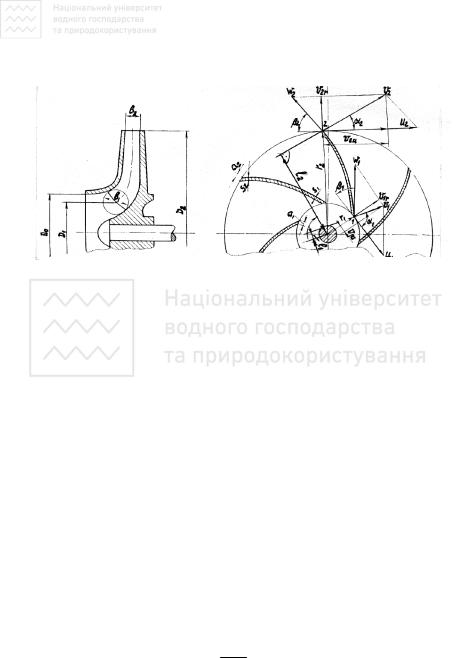
3.1. Рух рідини у робочому колесі відцентрового насоса.
Рух рідини у робочому колесі відцентрового насоса досить складний
(рис. 3.1).
Рис. 3.1. Схема руху частинок рідини в колесі насоса:
а- переносний рух; б- відносний рух; в- абсолютний рух
Рідина підводиться до робочого колеса у осьовому напрямі з абсолютною швидкістю Vо і продовжує рухатись у міжлопатевому каналі, одночасно при- ймаючи участь у переносному і відносному рухах. На рис. 3.1 показано схему руху частинок рідини в одному і тому ж робочому колесі в деякий момент часу. Рух частинки 1, яка обертається разом з робочим колесом, характеризу-
ється вектором переносної швидкості u , який напрямлений перпендикулярно радіусу (або по дотичній до кола обертання). Крім того, та ж частинка 1 пе- реміщується вздовж лопаті робочого колеса і характеризується вектором від-
носної швидкості w , який напрямлений по дотичній до лінії току (тобто, по дотичній до лопаті). Абсолютний рух характеризується вектором абсолютної
швидкості v , який дорівнює геометричній сумі векторів переносної і віднос-
ної швидкостей, тобто v = u + w . Таким чином, у будь-якій точці міжлопате- вого простору можливо побудувати трикутник (або паралелограм) швидко- стей.
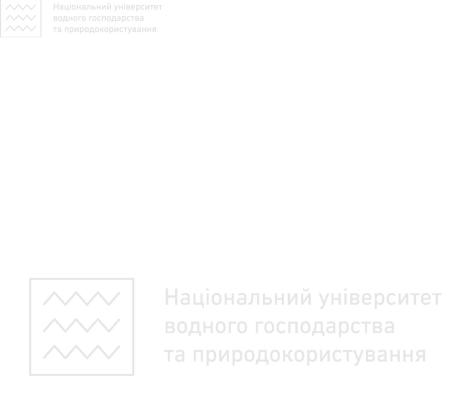
Для розгляду кінематики потоку при русі рідини в робочому колесі бу- дують трикутники швидкостей на вході 1 і виході 2 з робочого колеса (рис. 3.2), вважаючи, що при цьому у всіх точках перерізів на вході або на виході з робочого колеса трикутники швидкостей будуть однаковими.
На рис. 3.2 показані основні величини, які характеризують розміри робо- чого колеса, і трикутники швидкостей на вході 1 і виході 2: D1, D2 – діаметри на вході в канали і виході з них (діаметри входу і виходу); R1, R2 – радіуси входу і виходу; b1, b2 – ширина лопаті (каналу) на вході і виході; S1, S2 – тов- щина лопаті на вході і виході; w1, w2 – відповідні відносні швидкості; u1, u2 – переносні швидкості; v1, v2 – абсолютні швидкості; α1, α2 – кути між вектора- ми абсолютних і переносних швидкостей; β1, β2 – кути між векторами відно-
61
сних і продовженнями векторів переносних швидкостей, v1u, v2u – проекції абсолютних швидкостей на напрям переносних швидкостей; v1r, v2r – проек- ції абсолютних швидкостей на напрям радіуса (меридіональні швидкості); z – кількість лопатей, l1, l2 – плечі векторів абсолютних швидкостей відносно осі обертання робочого колеса.
Рис. 3.2. Схема робочого колеса насоса і трикутники швидкостей
Площі перерізів на вході f1 і виході f2 робочого колеса являють собою циліндричні поверхні висотою відповідно b1 і діаметром D1 на вході та b2 і D2 - на виході.
Без урахування стиснення f1 = π D1 b1; f2 = π D2 b2; з урахуванням стис-
нення f1 = π D1 b1 – za1b1; f2 = π D2 b2 – za2b2. Якщо a1 = |
|
S1 |
|
S 2 |
|
|||||||||||||
|
|
і a2 = |
|
, |
||||||||||||||
sin β 1 |
sin β 2 |
|||||||||||||||||
то f1 = b1(π D1 - z |
S1 |
); f2 = b2(π D2 - z |
S 2 |
). Винесемо за дужки в цих |
||||||||||||||
|
|
|
||||||||||||||||
sin β 1 |
sin β 2 |
|||||||||||||||||
виразах відповідно π D1 і π D2, після перетворення отримаємо |
|
|
|
|||||||||||||||
|
f1 = π D1 b1ψ1 ; |
(3.1) |
|
|
|
f2 = π D2 b2ψ2 ; |
|
(3.2) |
||||||||||
де |
ψ1 = 1 - |
|
zS1 |
|
; |
(3.3) |
ψ2 = 1 - |
|
|
zS 2 |
; |
(3.4) |
||||||
|
|
|
|
|
||||||||||||||
πD1 sin β 1 |
πD2 sin β 2 |
|||||||||||||||||
ψ1, ψ2 – коефіцієнти стиснення потоку, ψ1 = 0,75...0,83, ψ2 = 0,9...0,95. |
|
|
||||||||||||||||
|
Переносні швидкості визначаються за формулами: |
|
|
|
||||||||||||||
|
|
πD1n |
|
|
|
|
|
πD2 n |
|
|
|
|||||||
|
u1 = |
|
|
=R1 ω; |
(3.5) |
|
u2= |
|
|
|
=R2ω; |
|
(3.6) |
|||||
|
60 |
|
60 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
де n – частота обертання робочого колеса, об/хв., ω – кутова частота обертан- ня робочого колеса, с-1, при чому
ω= 2πn . (3.7)
60
62
Радіальні складові абсолютних швидкостей можна визначити так:
v1r= |
Q |
|
Q |
|
|
|
|
|
|
|
|
Q |
|
|
Q |
|
|
|
= |
|
; |
(3.8) |
|
v2r= |
|
= |
|
; |
(3.9) |
||||||
f 1 |
πD1b1ψ 1 |
f 2 |
πD2b2ψ 2 |
||||||||||||||
З трикутника швидкостей випливають такі корисні співвідношення (на- |
|||||||||||||||||
приклад, для виходу з робочого колеса): |
|
|
|
|
|
||||||||||||
v2u= v2 cosα2 ; |
|
(3.10) |
|
|
|
v2r= v2 sinα2 ; |
(3.11) |
||||||||||
З теореми косинусів |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
w22 = u22 + v22 – 2 u2 v2 cosα2 ; |
|
|
|
|
(3.12) |
|||||||||
Переносна швидкість |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
u2= v2u+ v2r ctgβ2; |
|
|
|
|
(3.13) |
|||||||
|
|
|
|
|
|
v2 |
|
|
|
sin β 2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
= |
|
|
. |
|
|
|
|
|
(3.14) |
|
|
|
|
|
|
u2 sin(α 2 + β 2) |
|
|
|
|
|
||||||
Аналогічні рівняння справедливі і для входу в робоче колесо. |
|
||||||||||||||||
Відповідно, з рис. 3.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
l2=R2cosα2; |
|
|
|
(3.15) |
|
l1=R1cosα1; |
(3.16) |
|||||||||
Для діючих насосів β2=15...400. |
|
|
|
|
|
|
|
|
|||||||||
Для більшості насосів |
α1=900. Тоді cosα1=0, sinα1=1 і v1u=0, v1r= v1. |
||||||||||||||||
Для зменшення втрат напору |
при вході рідини |
на лопать |
треба |
||||||||||||||
обов’язково дотримуватись умови безударного входу, яка забезпечується збігом напряму вхідного елемента лопаті з напрямом відносної швидкості w1.
Проте досліди показують, що невелике відхилення елемента лопаті від напряму відносної швидкості не призводить до відриву потоку, і гідравлічні втрати на удар не відбуваються. Тому в сучасних насосах лопаті встановлю- ються під кутом β’ більшим від кута лопаті β1 на 3...80 (0,05...0,136 рад). Різ- ниця кутів βат= β’-β1 називається кутом атаки. Кут β1 визначають з трикут- ника швидкостей при розрахунковому режимі роботи насоса.
Внаслідок збільшення кута порівняно з розрахунковим збільшується площа проходу між лопатями і зменшується швидкість, що призводить до зменшення втрат енергії в самому робочому колесі.
Вхідна кромка лопаті повинна бути заокруглена. Це робить лопать менш чутливою до відхилень напряму відносної швидкості, які спостерігаються при зміні подачі насоса.
Поліпшення умов обтікання вхідної кромки зменшує втрати напору при вході рідини на лопать і підвищує к.к.д насоса.
3.2. Основне рівняння лопатевих насосів.
Для виведення основного рівняння напору насоса Л. Ейлером було зроб- лено такі припущення:
а) робоче колесо має нескінченну кількість дуже тонких лопатей; б) рідина ідеальна, тобто рухається без втрат напору.
63
Основне рівняння насоса зв’язує геометричні та кінематичні характерис- тики робочого колеса з напором насоса. Якщо визначати енергію, що в цих умовах передається насосом одиниці ваги рідини, то вона дорівнюватиме теоретичному напору НТ насоса.
Рівняння напору лопатевих насосів виводиться на основі рівняння моме- нтів кількості руху, яке формулюється так:
Зміна моменту кількості руху маси рідини, що протікає за 1 с при переході від одного перерізу (1-1) до іншого (2-2), дорівнює моменту зовнішніх сил між цими перерізами, тобто дорівнює крутячому моменту Мкр.
У лопатевому насосі зовнішні сили прикладаються до потоку дією лопа- тей робочого колеса з крутячим моментом Мкр, що передається від двигуна.
Відомо, що кількість руху – це добуток маси на швидкість mv. Момент кількості руху потоку на радіусі R1 на вході в робоче колесо (переріз 1-1) до- рівнює:
|
M1=ρQv1l1 |
(3.17) |
|
Момент кількості руху потоку на радіусі R2 на виході з колеса (переріз 2- |
|
2) дорівнює: |
|
|
|
M2=ρQv2l2 |
(3.18) |
де ρ - густина рідини. |
|
|
|
Позначимо момент зовнішніх сил М=Мкр, тоді |
|
|
M=M2-M1=ρQ(v2l2-v1l1), |
(3.19) |
або |
M=ρQ(v2R2cosα2 - v1R1cosα1). |
(3.20) |
|
Помножимо обидві частини рівняння на кутову швидкість ω, тоді |
|
|
Мω=ρQ ω(v2R2cosα2 - v1R1cosα1); |
(3.21) |
Мω - являє собою потужність, яка необхідна для передачі енергії рідині, тоб- то
Мω=N=ρgQHТ; |
(3.22) |
Враховуючи (3.5), (3.6) отримаємо |
|
ρgQHТ= ρQ(u2v2cosα2- u1v1cosα1). |
(3.23) |
Звідси, теоретичний напір |
|
HТ= |
u2v |
2 cosα |
2 − u1v1 cosα1 |
. |
(3.24) |
||||
|
|
|
g |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Це і є формула Л. Ейлера, яку він вивів вперше. Якщо α1=900, то cosα1=0 |
|||||||||
і |
|
|
|
|
|
|
|
||
HТ= |
u2v2 cosα2 |
= |
u2v2u |
. |
|
(3.25) |
|||
|
g |
|
g |
|
|||||
|
|
|
|
|
|
|
|
||
Дійсний напір, який створюється насосом, менший від теоретичного. По- яснюється це тим, що частина напору витрачається на подолання гідравліч- них опорів всередині насоса. Ці втрати враховуються введенням гідравлічно- го к.к.д ηг. Крім того, при скороченні кількості лопатей (що має місце на практиці) не всі частинки рідини, взяті між сусідніми лопатями, рухаються по
64
однакових траєкторіях, внаслідок чого трикутники швидкостей на виході з колеса для різних струминок неоднакові. Для врахування скінченної кількос- ті лопатей z вводять у формулу напору поправочний коефіцієнт k<1. Тоді рівняння напору набере вигляду
H=ηг |
k |
u2v2 cosα2 |
; |
(3.26) |
|
||||
|
|
g |
|
|
За формулою Пфлейдерера |
|
|
|
|
k = |
|
|
|
1 |
|
|
, |
(3.27) |
|
|
|
|
|
||||
|
|
2ϕ |
|
|
||||
1 + |
|
|
|
|
|
|
||
|
− |
R |
|
2 |
|
|||
|
|
z 1 |
1 |
|
|
|
||
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
де за формулою А. А. Ломакина |
|
|
|
|
|
|
||
|
ϕ=0,6(1+sinβ2) |
|
|
(3.28) |
||||
Величина ηг коливається в межах 0,80...0,95, |
а значення коефіцієнта k |
|||||||
може змінюватися в межах 0,75...0,95. |
|
|
|
|
|
|||
З основного рівняння видно, що HТ пропорційний v2u. З рівняння (3.13) v2u = u2 – v2r ctgβ2, тому при збільшенні β2 тангенціальна складова абсолютної швидкості v2u зростає. Здавалося б, що вигідно робити насоси з лопатями, які загнуті наперед. Проте на практиці робочі колеса відцентрових насосів роб- лять з лопатами, які загнуті назад. Такі конструкції коліс дозволяють вже в самому насосі більшу частину енергії отримувати у вигляді тиску, а меншу у вигляді швидкісного напору. Загнуті наперед лопаті використовують у вен- тиляторах.
Розглянемо рух рідини у проточному тракті осьового насоса і відзна- чимо такі його особливості.
а) Швидкості потоку рідини в поперечних перерізах перед лопатями робочого колеса і після випрямного апарату – розподілені рівномір- но, а напрям їх співпадає з напрямом осі насоса.
б) В межах робочого колеса і випрямного апарату кожен струмінь рі- дини рухається по поверхні циліндра, віссю якого є вісь насоса.
в) Рух рідини вздовж радіусів будь-якого перерізу робочого колеса або випрямного апарата – відсутній.
г) Випрямний апарат перетворює обертальний рух рідини (закрутку потоку) знову у поступальний рух і далі рідина рухається поступаль- но паралельно осі насоса.
Розрахункова схема потоку і робочого колеса наведена на рис. 3.3. Враховуючи особливості осьового насоса,
D2 = Dрк ; R1 = R2 = R ; u1 = u2 = u = πD2 n/60;
v1 = v2r = v2 sinα2 = QT/ [ π(Dрк2 – Dвт2 )/4]= vсер.
(3.29)
Звідси
65

v2 = v2r / sinα2 ; |
(3.30) |
v2u = u2 – v2r ctgβ2; |
|
|
(3.31) |
Рис. 3.3. Розрахункова схема осьового насоса і решітка профілей ло- патей
Тоді стає відомим |
|
|
HT =(u2 v2u)/g; |
(3.32) |
tgα2 = v2r/ (u2 – v2r ctgβ2 ). |
|
|
(3.33) |
Це дає струминна теорія.
Проте струминна теорія, яка не розглядає рух рідини в межах робо- чого колеса, не забезпечує раціональні способи розрахунку лопатевої системи робочих коліс. Тому з’явилась вихрова теорія, яку розробив М.Е.Жуковський.
Ця теорія базується на уяві про механізм силової взаємодії потоку рідини з тілом, яке потік оточує. Тобто базою вихрової теорії є про- цес оббігання потоком рідини лопаті робочого колеса. В окремих циліндричних перерізах вони мають форму крила і складають решіт- ку профілів, (див. рис 3.3).
Середня лінія профілю, яка поділяє його на половину по всій дожині називається хребтом, рис. 3.4.
Рис. 3.4. Профіль циліндричного перерізу лопаті робочого колеса осьового насоса
66
Пряма лінія, яка з’єднує кінці хребта називається хордою профілю і має довжину l, а кут між напрямом швидкості потоку рідини перед лопаттю w∞ і хордою називається кутом атаки αw .
При оббіганні рідиною профілю на його поверхні утворюються си- льно завихрений пограничний шар і вихорі зриваються з вихідної кромки лопаті. Навкруги профілю утворюється циркуляція Гл, яка дорівнює циркуляції вихрового сліду. Значення Гл визначається фор- мулою
Гл =k w∞ l αw |
(3.34) |
де k - постійна, яка залежить від форми профілю лопаті.
За рахунок циркуляції швидкості сумарна швидкість під профілем менша, а над профілем більша ніж w∞, тому знизу тиск на лопать бі- льший ніж зверху, що забезпечує підйомну силу Pу. Цю силу Ру та си- лу лобового опору Рх при різних кутах атаки αw, визначають при до- слідах в аеродинамічних трубах. Результати дослідів представляють у вигляді графіків залежності відповідних коефіцієнтів від кута атаки
αw. |
|
|
|
|
|
|
|
|
|
Cx = f ( αw ); |
|
Cy = f ( αw ). |
|
||||||
Значення сил знаходять за формулами |
|
|
|
|
|
||||
P |
x |
= C ρ ( w 2 |
/2) l b (3.35) |
P |
y |
= C |
ρ( w 2 |
/2) l b. |
|
|
x |
∞ |
|
|
y |
∞ |
|
||
|
|
|
|
|
|
|
|
|
(3.36) |
де ρ -густина рідини, кг/м3; b - довжина крила (профілю) в напрямі проти рисунку - для осьового насоса b =(Dрк –Dвт)/2, м; ℓ- довжина хорди профілю, м.
Найбільш ефективні режими роботи профілю (з найбільшим гідрав- лічним к.к.д) при Cx /Cy = (Cx /Cy)min. Цим режимам відповідають найчастіше кути атаки αw = 2…4о.
Інтенсивність вихрового (гвинтового) руху у потоці рідини визнача- ється циркуляцією швидкості Г , яка є роботою вектора швидкості
Г = ∫v cos(v d s)ds = ∫v cosαds
(3.37)
де v - швидкість потоку у даній точці, α - кут між напрямом вектора швидкості і дотичною до контуру у даній точці, ds - елементарний відрізок контуру.
Розглянемо замкнутий контур радіуса R2 = D2/2 =Dрк/2 , тоді на ви- ході з робочого колеса
Г2 = ∫v2 cosα 2ds
(3.38)
Для даної схеми, див. рис. 3.3, у будь-якій точці контуру
. |
v2 = const; |
α2 = const. |
67

Тоді
Г2 = v2 cosα2 ∫ds = 2πR2v2 cosα2 .
|
(3.39) |
Звідси |
|
v2 cosα2 = Г2 / (2πR2) ; |
(3.40) |
Аналогічно для входу на робоче колесо |
|
Г1 = 2πR1 v1 cosα1 ; |
(3.41) |
|
v1 cosα1 = Г1 / (2πR1). |
|
(3.42) |
Враховуючи, що R1 =R2 = R , та u1 =u2 = u і підставляючи ці вирази в формулу Л.Ейлера, одержимо
HT =( u2Г2 – u1Г1 )/(2π Rg) = u (Г2 – Г1 )/ 2πRg ;
Використавши заміну u =2πRn /60, дістанемо |
|
HТ =( Г2 – Г1 ) n /( 60g ) |
(3.43) |
При α2 = 90о |
|
HT = =Г2 n /(60 g). |
(3.44) |
Різниця циркуляцій ( Г2 – Г1 ) створюється за рахунок циркуляції на- вколо лопатей робочого колеса, тому Г2 – Г1 =zл Гл і
HТ =( Г2 – Г1) n /( 60g) =n zл Гл/(60g).
(3.45)
Повертаючи усі лопаті одночасно, можливо збільшити, або зменши- ти кут атаки αw і відповідно змінити циркуляцію навколо лопаті, а, отже, і характеристику насоса.
3.3. Характеристики лопатевих насосів.
3.3.1. Теоретична напірна характеристична лінія насоса.
Залежності напору Н, потужності N, коефіцієнта корисної дії η , допус- тимого кавітаційного запасу ∆hдоп від подачі Q насоса при заданому діаметрі робочого колеса Dрк і постійній частоті обертання n називається характеристикою насоса. Характеристика насоса складається з характеристичних ліній.
Скорочено робочі характеристичні лінії насоса запишемо так:
H=f(Q) – напірна; N=f(Q) - потужності; η=f(Q) – к.к.д; ∆hдоп =f(Q) – каві- таційна;
Розглянемо шлях отримання теоретичної напірної характеристичної лінії відцентрового насоса. Пригадаємо рівняння Л. Ейлера при α1=900
HТ= |
u2v |
2u |
. |
(3.46) |
|
g |
|||||
|
|
|
|||
За рівнянням (3.6) u2= πD2n =const, - постійна швидкість переносного руху.
60
Знайдемо v2u з рівняння (3.13):
68
v2u= u2- v2rctgβ2 ,
тоді за залежністю (3.9)
|
|
|
|
v2u= |
u2 - |
|
|
Q |
|
|
ctgβ2 . |
|
|
|
|
(3.47) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
πD b ψ |
2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
Після підстановки в (3.29) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
u2 |
|
|
|
u |
Qctgβ |
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
HТ= |
2 |
|
- |
2 |
|
|
|
; |
|
|
|
|
|
(3.48) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
g gπD2b2ψ |
2 |
|
|
|
|
|
|
|
||||||||
або |
|
|
|
|
HТ=А-В Q , |
|
|
|
|
|
|
|
|
|
(3.49) |
||||||
|
|
u |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
u |
2 |
ctgβ |
2 |
|
|
де |
А= |
|
2 |
, |
|
(3.50) |
|
|
|
|
В= |
|
|
. |
(3.51) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
g |
gπD2b2ψ 2 |
|
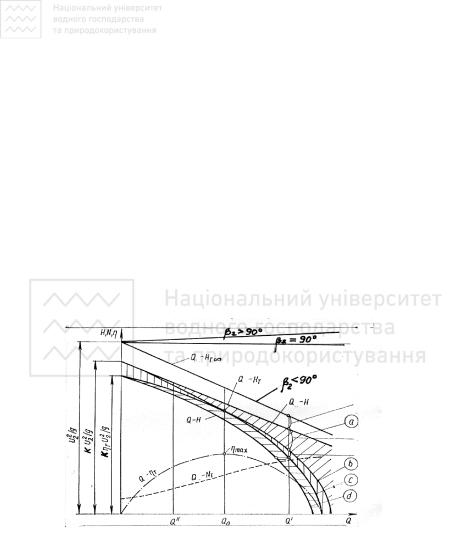
Таким чином, теоретична напірна характеристична лінія насоса – це пря- ма лінія, яка має похил в залежності від значення коефіцієнта В.
При β2 < 900, ctgβ2 > 0 – характеристична лінія знижується; при β2 = 900, ctgβ2 = 0 – характеристична лінія горизонтальна; при β2 > 900, ctgβ2 < 0 – характеристична лінія зростає, рис. 3.5.
β2>90º |
|
|
|
|
|
|
|
β2=90º |
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Втрати напору |
|
|
|
β2<90º |
|
||
|
|
|
|
|
при кількості |
|
|
|
|
|
|
|
лопатей Z |
|
|
|
|
|
|
|
Втрати напору
на тертя
Втрати напору
на удар
Рис. 3.5. Теоретична напірна характеристична лінія насоса
Кількість лопатей враховує коефіцієнт k =0,75...0,95 (лінія а). Втрати напору в міжлопатевих каналах враховує коефіцієнт корисної дії ηg (крива b). Втрати напору на удар визначаються залежністю hуд= k2(Qopt –Q”)2, де k2– коефіцієнт, що враховує втрати напору на удар (крива с); Qвит- витрата зворотного виті- кання рідини (крива d).
При Q = 0, НТ = А = u22 / g . При НТ= 0, Q = A / B .
69
Висновок. Теоретично отримати напірну характеристичну лінію насоса з достатньою точністю неможливо через невизначеність коефіцієнтів гідравлі- чних залежностей, тому проводять параметричні дослідження.
3.3.2. Експериментальна характеристика насоса. Параметричні дослі- дження насосів.
Виготовлені на заводі насоси підлягають заводським дослідженням за ГОСТ 6134-71. При дослідженні визначаються гарантовані заводом парамет- ри: подача Q, напір Н, потужність N і к.к.д η при постійній частоті обертання n і діаметрі робочого колеса Dрк.
Дослідження виконують на спеціальних стендах, рис. 3.6 Вимірювання параметрів здійснюється за допомогою таких приладів і пристроїв:
.
70