

3. Лекция 2. Прямая и плоскость (1 с.) +
.pdf1
ЛЕКЦИЯ 2
Прямая линия и плоскость в евклидовых пространствах R2 и R3
До сих пор понятия прямой линии и плоскости не были определены строго и рассматривались на интуитивном уровне. В этом параграфе понятия прямой линии и плоскости вводятся строго, но в простейшем случае евклидовых про-
странств R2 и R3 . Дальнейшее обобщение теории плоскостей на случай векторных пространств произвольной размерности (аффинных и евклидовых) будет подробно изложено ниже.
|
Уравнения прямой линии на плоскости R2 . В пространстве R2 |
зафик- |
||||||||||
сируем некоторый канонический базис |
|
|
|
|
|
|
|
|
|
|
||
O, e 1 , e |
2 , то есть введём декартову |
|||||||||||
|
|
|
|
|
x1 |
|
|
|
|
x1 |
; x1 с известными |
|
систему координат. |
Каждые две точки |
M |
0 |
; x2 |
и |
M |
1 |
|||||
|
|
|
|
0 |
0 |
|
|
1 |
1 |
|
||
(фиксированными) |
координатами |
определяют |
фиксированный |
вектор |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
M 0 M1 . Если мы умножим данный вектор на некоторый параметр t , кото- |
|||||||||||
рый может принимать произвольные значения из множества действительных чисел, то есть t , , то получим ведущий вектор
|
|
|
M 0 M |
t a , |
|
начальная точка которого фиксирована, а конечная точка M x1; x2 |
является |
|
текущей, то есть имеет меняющиеся в зависимости от значения параметра t ко-
ординаты. Бесконечное множество текущих точек M x1; x2 назовём пря-
мой линией L , проходящей через точку M 0 x10 ; x02 и имеющей направляю-
|
|
щий вектор a |
M 0 M1 . |
Получим уравнения для координат текущей точки M x1; x2 . Для этого
обратимся к рисунку 2.1. Из рисунка видно, что выполняются следующие соотношения:
|
|
|
|
|
|
|
|
|
|
|
|
|
OM 0 |
M 0 M |
OM , M 0 M |
t a , |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
OM |
0 |
x1 e 1 |
x2 |
e |
2 , OM x1 e 1 |
x2 |
e 2 , a |
a1 e 1 |
a2 |
e 2 . |
||
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
Подставляя в первое соотношение все остальные, получаем следующее равенство
|
|
|
|
|
|
|
|
|
x1 e 1 |
x2 e 2 |
x1 |
e 1 |
x2 |
e |
e 1 a2 |
||
2 t a1 |
||||||||
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
e2 .

2
X 2
L |
|
M 0 |
|
|
|
|
|
||
|
|
|
|
|
e |
2 |
M |
||
a |
||||
|
|
|
||
|
|
|
X 1 |
O e1
Рис. 2.1.
Приравнивая координаты векторов в правой и в левой частях этого равенства, по-
лучаем параметрические уравнения прямой линии на плоскости R2 :
x1 |
x10 |
a1 t, |
|
|
(2.1) |
x2 |
x02 a2 t. |
|
Из параметрических уравнений (2.1) легко получить так называемые канонические уравнения прямой линии, для этого прибавляя к обеим частям первого
и второго уравнений соответственно x10 и x02 и деля обе части получившихся равенств на a1 и a2 соответственно, получаем следующие равенства:
|
1 |
|
1 |
|
|
||
|
x |
|
x0 |
|
t, |
||
|
|
|
|
||||
|
|
a |
1 |
|
|
||
|
|
|
|
|
|||
2 |
x02 |
|
|
||||
x |
|
t. |
|||||
|
|
|
a |
2 |
|
||
|
|
|
|||||
|
|
|
|
|
|||
Приравнивая левые части, получаем следующие уравнения:
x1 x1 |
|
x2 x2 |
|
|
|
0 |
0 |
, |
(2.2) |
||
a1 |
a2 |
||||
|
|
|
которые называются каноническими уравнениями прямой линии на плоскости
R2 .
Исключим из (2.1) параметр t , для чего умножим первое уравнение на a2 , а второе на a1 и, вычтем получившиеся равенства, получим
a2 x1 a1 x2 a2 x1 |
a1 x2 |
, |
||||
|
|
|
0 |
|
0 |
|
или |
a1 |
x2 |
|
|
0. |
|
a2 x1 x1 |
x2 |
(2.3) |
||||
0 |
|
|
|
0 |
|
|
Из этого равенства видно, что вектор
|
|
|
|
a1 |
|
N |
|
a2 |
e1 |
e 2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
ортогонален направляющему вектору прямой линии a |
M 0 M1 и текущему |
||||||||
вектору |
|
|
|
|
|
|
|
|
|
|
|
x1 x1 |
|
x2 |
|
|
|
||
M |
0 |
M |
|
e1 |
x2 |
e 2 . |
|
||
|
|
|
0 |
|
|
0 |
|
|
|
Вектор N называется нормальным вектором прямой линии L . Теперь очевид-
но, что уравнения прямой линии (2.1) эквивалентны условию ортогональности
|
|
|
|
|
|
нормального вектора прямой линии N и текущего вектора M 0 M , то есть |
|||||
|
|
|
|
|
|
N, M 0 M 0 . |
|
|
|
||
|
|
|
|
|
|
Обозначая a2 A, a1 B и |
a2 x1 |
a1 x2 |
C , получаем неявное |
||
|
|
|
0 |
0 |
|
уравнение прямой линии, записанное в стандартной форме |
|||||
A x1 |
B x2 C 0, |
|
|
(2.4) |
|
которое иногда называют общим уравнением прямой линии. Из уравнения (2.4) при условии C 0 получаем уравнение прямой линии в отрезках
|
x1 |
|
x2 |
|
1, |
(2.5) |
|||
|
a |
b |
|
||||||
|
|
|
|
|
|
|
|||
где a |
C |
, |
b |
C |
. Условие C 0 , очевидно, означает, что прямая линия не |
||||
|
B |
||||||||
|
|
|
A |
|
|
|
|||
проходит через начало координат. Геометрический смысл коэффициентов a и b легко выясняется из рисунка 2.1 – эти коэффициенты равны, соответственно, ве-
личинам отрезков, отсекаемых прямой линией L на осях координат.
Заметим, что, так как мы рассматриваем свободные векторы, для подсчёта координат которых положение начала системы координат не имеет значения, в качестве направляющего вектора мы можем при выводе параметрических уравне-
ний прямой линии выбрать любой вектор a , коллинеарный любому вектору, лежащему на прямой L . Аналогично, в качестве нормального вектора мы можем выбрать любой вектор, ортогональный любому вектору, лежащему на прямой L .
Пример 2.1. Получить уравнение прямой линии L , проходящей через точ-
|
|
|
|
ку M0 3; 2 и имеющий нормальный вектор N |
|
e1 |
4 e 2 . |
Р е ш е н и е. Уравнение прямой линии получается из условия ортогональ-
ности вектора N и ведущего вектора прямой линии
|
|
x2 |
|
M0M |
x1 3 e1 |
2 e 2 , |
то есть

4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N, M 0 M 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Используя выражение для скалярного произведения |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
4 x2 5, |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
N, M |
0 |
M x1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
получаем неявное уравнение прямой линии x1 4 x2 |
5 0 . |
|
||||||||||||||||||||||
Уравнение прямой линии в трёхмерном пространстве R3 . Рассмотрим |
||||||||||||||||||||||||
теперь |
случай |
|
пространства R3 (рисунок 2.2). Очевидно, что справедливы |
|||||||||||||||||||||
следующие соотношения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
OM |
0 |
M |
0 |
M |
OM , |
M |
0 |
M t a , |
OM |
0 |
x1 |
e 1 x2 |
e 2 x3 e 3 , |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
OM |
x1 |
|
e 1 |
x |
2 e 2 |
x3 e 3 , |
a a1 e1 a2 e 2 a |
3 e 3 , |
|
|||||||||||||||
которые отличаются от соответствующих соотношений для плоскости R2 |
только |
|||||||||||||||||||||||
наличием третьей координаты. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
X 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
M 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
a |
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
X |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
e1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X 1 |
|
|
Рис. 2.2. |
|
|
|
|
|
|
|
|
|
|||
Поэтому, простые преобразования дают |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 e1 x2 e 2 x3 e 3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
e1 x2 e 2 |
|
|
|
|
e1 |
a2 e 2 |
a3 e |
|
|
||||||||||||||
x3 e 3 t a1 |
3 , |
|
|
|||||||||||||||||||||
|
0 |
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
откуда следуют параметрические уравнения прямой линии в пространстве
R3 :
x1 |
x10 |
|
|
|
x02 |
x2 |
||
|
3 |
3 |
x |
|
x0 |
a1 t,
a2 |
t, |
(2.6) |
a3 |
t. |
|
5
Из уравнений (2.6) нетрудно получить канонические уравнения прямой линии в пространстве R3 , которые имеют вид:
x1 x10 |
|
x2 x02 |
|
x3 x03 |
. |
(2.7) |
a1 |
a2 |
|
||||
|
|
a3 |
|
|||
В параграфе 2.10 (задача 2.10.3) показано, что канонические уравнения прямой линии (2.7) выражают тот факт, что прямая линия является множеством точек пе-
ресечения двух плоскостей в пространстве R3 .
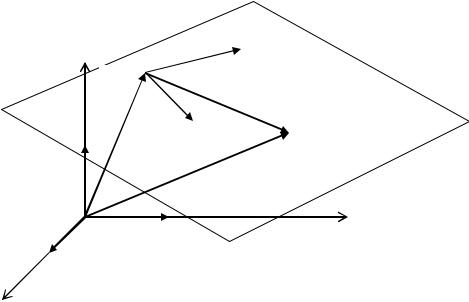
Уравнения плоскости в пространстве R3 . На рисунке 2.3 изображена
фиксированная точка M 0 , от которой откладывается вектор M 0 M , который яв-
ляется вектором из линейной оболочки неколлинеарных векторов a 1 и a 2 , закреплённых в точке M 0 .
X 3 |
|
|
|
|
|
a 2 |
|
M 0 |
|
|
|
|
|
|
|
x 0 |
|
M |
|
|
a |
|
|
|
1 |
|
|
|
|
|
|
e 3 |
|
|
|
|
x |
|
|
|
|
|
|
O |
|
|
|
|
|
X |
2 |
e |
2 |
|
|
|
|
||
|
|
|
|
e1 |
|
|
|
|
|
Рис. 2.3. |
|
X 1
Непосредственно из рисунка видно, что выполняются следующие соотношения:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
OM 0 |
M 0 M |
OM ; |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M0M t1 a1 t2 a 2 ; |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x 0 |
OM |
0 |
x1 |
e 1 |
x2 |
|
e |
2 x3 |
e |
3 ; |
||||||
|
|
|
|
|
0 |
|
|
0 |
|
|
|
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x OM x1 |
e 1 x2 |
e 2 x3 |
e 3 ; |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
a1 |
a1 |
e 1 a2 |
|
e 2 a3 |
|
e 3 ; |
|
|
|
|||||||
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
a1 |
|
a2 |
|
|
a3 |
|
|
|
|
|
|||||
a 2 |
e 1 |
|
e 2 |
e |
3 . |
|
|
|
||||||||
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
6
Истолковывая первое из приведённых соотношений аналогично тому, как это было сделано при выводе уравнения прямой линии, и записывая его с учётом второго соотношения в виде
|
|
|
|
|
|
|
|
|
x |
x 0 t1 a1 t2 a 2 , |
|
(2.8) |
|
||||
приходим к понятию плоскости. |
|
|
|
|
||||
Назовём |
плоскостью H 2 |
в пространстве R3 множество текущих |
||||||
точек M x1; |
x2 ; x3 |
, являющихся конечными точками вектора |
|
|
||||
|
|
|
|
|
|
|
|
|
M0M t1 a1 |
t2 |
a 2 , |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, a |
|
представленного разложением по паре неколлинеарных векторов a1 |
2 , |
|||||||
|
|
|
|
|
|
|
|
|
приложенных к точке |
M 0 x10 ; x02 ; x03 , при всевозможных значениях пара- |
|||||||
|
|
|
|
|
|
|
|
|
метров t1 и |
|
|
|
a |
|
|
||
t2 . Векторы a1 , |
2 называются направляющими векторами |
|||||||
|
|
|
|
|
|
|
|
|
плоскости H 2 .
Само уравнение (2.8) называется векторным параметрическим уравнением плоскости.
Подстановка всех соотношений |
в векторное уравнение плоскости даёт: |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 e1 |
x2 e 2 |
x3 e 3 |
x1 |
e1 |
x2 |
e |
2 x3 |
e |
3 |
|
|
|
||||||
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e1 a2 |
e 2 a3 |
e |
|
|
|
|
e1 a2 |
e 2 |
a3 |
e |
|||||||
t a1 |
3 |
t |
|
a1 |
3 . |
|||||||||||||
1 |
1 |
|
1 |
|
1 |
|
|
|
|
2 |
|
2 |
|
2 |
|
2 |
|
|
Из последнего равенства получаем параметрические уравнения плоскости H 2 в евклидовом пространстве R3 :
x1x2
x3
x10
x02
x03
a11 t1 a12
a12 t1 a22
a13 t1 a23
t2 ,
t2 , (2.9)
t2 .
Рассмотрим следующее преобразование уравнений (2.9). Исключим пара-
метры t1 |
и t2 из системы уравнений (2.9), для чего рассмотрим первые два |
||
уравнения как систему относительно параметров |
|||
1 |
1 |
1 |
1 |
a1 |
t1 a2 t2 x |
|
x0 , |
a12 t1 a22 t2 x2 x02 .
7
Предполагая, что a11 a22 a12 a12 0 (условие, следующее из того, что направ-
ляющие векторы линейно независимы), решим систему, умножая обе части каждого из уравнений на соответствующие величины и складывая уравнения почленно:
t |
x1 |
x1 |
a2 |
x2 x2 |
a1 |
|
|
x2 |
x |
2 a1 |
x1 x1 |
a2 |
||
|
0 2 |
|
0 2 , t |
2 |
|
0 1 |
|
0 |
1 . |
|||||
1 |
|
a1 |
a2 |
a1 |
a2 |
|
|
|
a1 |
a2 |
a1 |
a2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
1 |
2 |
2 |
1 |
|
|
|
|
1 |
2 |
2 |
1 |
|
Подстановка в третье уравнение системы (2.9) после простых преобразований приводит нас к следующему равенству
a3 |
a2 |
a3 |
a2 x1 |
a3 a1 a3 |
a1 x2 |
|
a1 |
a2 |
a2 |
a1 x3 |
|
|
||||||||||
2 |
1 |
1 |
|
2 |
|
|
1 |
2 |
2 |
|
1 |
|
|
1 |
|
2 |
1 |
|
2 |
x3 |
|
|
a3 a2 a3 |
a2 x1 |
|
a3 |
a1 |
a3 |
a1 x2 |
a1 |
a2 a2 |
a1 |
, |
||||||||||||
|
2 |
1 |
1 |
2 |
0 |
|
1 |
2 |
|
2 |
|
1 |
0 |
|
1 |
|
2 |
1 |
2 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.10) |
|
|
|
|
которое может быть переписано в виде |
|
|
|
|
x2 x2 |
|
|
|
|
|
|
|||||||||||
a3 |
a2 |
a3 a2 x1 |
x1 |
a3 a1 |
a3 |
a1 |
|
|
|
|
|
|||||||||||
2 |
1 |
1 |
|
2 |
|
0 |
|
1 |
2 |
|
2 |
1 |
|
|
|
0 |
|
|
|
|
|
|
a1 a2 a2 a1 x3 |
x3 |
0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
2 |
1 |
2 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из этого равенства видно, что скалярное произведение векторного произведения
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
, |
a 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
||
a2 |
a3 a2 |
e1 a3 a1 |
a3 a1 |
e |
2 |
|
a2 |
a2 |
a1 |
e 3 |
|||||||||||
|
|
2 |
|
|
1 |
|
1 |
2 |
1 |
2 |
2 |
1 |
|
|
|
1 |
2 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на текущий вектор M 0 M равно нулю. Поэтому вектор |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
N a |
1 , a |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
естественно назвать нормальным вектором плоскости |
H 2 |
в пространстве |
|||||||||||||||||||
R3 . Соотношение (2.10) можно переписать в виде |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
a1 , a |
2 , |
OM |
|
a1 , a |
2 , OM 0 |
, |
|
|
|
|
|
|
|
(2.11) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
из которого видно, что из параметрических уравнений плоскости (2.9) следует по-
стоянство ориентированного объёма параллелепипеда, построенного на приведённых к общему началу направляющих векторах и радиус-вектора теку-
|
|
|
|
|
|
щей точки плоскости. Обозначая в (2.10) координаты вектора |
|
1 , a |
соот- |
||
a |
2 |
||||
|
|
|
|
|
|
ветственно |
A , B и C , а правую часть D , получаем неявное уравнение плос- |
|
кости |
|
|
A x1 |
B x2 C x3 D 0. |
(2.12) |

8
Из уравнения (2.12) при условии D 0 получаем уравнение плоскости в
отрезках
x1 |
|
x2 |
|
x3 |
1, |
(2.13) |
|
a |
b |
c |
|||||
|
|
|
|
где a DA , b DB , c CD . Нетрудно видеть, что эти коэффициенты равны
величинам отрезков, отсекаемых плоскостью на осях координат. Очевидно, что уравнение плоскости в отрезках может быть получено только в том случае, если плоскость не проходит через начало координат.
|
|
|
|
|
|
|
В отношении нормального вектора плоскости |
|
|
1 , a |
справедливо |
||
N a |
2 |
|||||
|
|
|
|
|
|
|
то же замечание, что и в отношении нормального вектора прямой линии на плос-
кости R2 : в качестве нормального вектора можно выбрать любой вектор, ортогональный произвольному вектору, лежащему в плоскости.
Взаимное расположение прямой линии и плоскости в пространстве R3 .
Среди различных задач, решаемых средствами аналитической геометрии в про-
странстве R3 , есть несколько типичных, а именно: задача определения двугранного угла между плоскостями; задача получения уравнения прямой линии, заданной как пересечение двух плоскостей; задача определения координат точки пере-
сечения прямой линии L и плоскости H 2 ; задача определения координат проекции точки M 0 x10 ; x02 ; x03 на плоскость H 2 и расстояния от данной точки до плоскости. Рассмотрим решение этих задач последовательно.
Угол между плоскостями H 2 и H 2 . Пусть требуется найти угол между
1 2
плоскостями, проходящими через три, не лежащие на одной прямой точки
A1 x11; x12 , x13 , A2 x12 ; x22 , x23 , A3 x31 ; x32 , x33 ,
и
B1 y11; y12 , y13 , B2 y12 ; y22 , y23 , B1 y31 ; y32 , y33 ,
соответственно. Для решения этой задачи поступаем следующим образом: 1) за направляющие векторы плоскостей принимаем векторы
|
|
|
|
|
|
|
|
|
|
|
|
||
a1 |
A A |
a1 |
|
e 1 |
a2 |
|
e |
2 |
a3 |
e |
3 , |
||
|
1 |
2 |
1 |
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
a 2 |
A A |
a1 |
e 1 a2 |
e |
2 a3 e 3 ; |
||||||||
|
1 |
3 |
2 |
|
2 |
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 |
B B |
b1 |
|
e 1 |
b2 |
e |
2 |
b3 |
e |
3 , |
|||
|
1 |
2 |
1 |
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
b 2 |
B B |
b1 |
e1 b2 e 2 |
b3 |
e 3 |
|
|||||||
|
1 |
3 |
2 |
|
|
2 |
|
|
|
2 |
|
|
|
соответственно.

9
2) находим нормальные векторы плоскостей как векторные произведения направляющих векторов:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
N 1 A1 A2 , A1 A3 , |
N 2 |
B1B2 , B1B3 |
; |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3) находим косинус угла между плоскостями, как косинус угла между |
|||||||||||||||||||||||||||||||||
нормальными векторами плоскостей: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
N 1 , N 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
cos |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
N 1 |
|
|
N 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Если плоскости заданы своими параметрическими уравнениями |
|||||||||||||||||||||||||||||||||
x1 |
x10 a11 t1 |
a12 t2 |
, |
x1 |
x10 b11 s1 b21 s2 , |
||||||||||||||||||||||||||||
|
|
|
x02 |
a12 t1 |
|
a22 t2 , |
|
|
x02 b12 s1 b22 s2 , |
||||||||||||||||||||||||
x2 |
|
x2 |
|
||||||||||||||||||||||||||||||
x3 |
x3 |
a3 t a3 t |
2 |
, |
x3 |
|
x3 |
b |
3 |
s b3 s |
2 |
, |
|||||||||||||||||||||
|
|
|
|
0 |
1 |
1 |
|
|
|
|
2 |
|
|
|
|
|
0 |
1 |
1 |
2 |
|
|
|||||||||||
где M |
0 |
x1 , x2 |
, x3 и |
|
|
N |
0 |
y1 |
, y2 , y |
3 |
– |
точки, |
через |
которые проходят |
|||||||||||||||||||
|
|
0 |
0 |
0 |
|
|
|
|
|
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|||||||||||
плоскости, а |
ai |
i 1, 2, 3; |
|
j 1, 2 и |
bi |
i 1, 2, 3; j 1, 2 – координаты |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
направляющих векторов плоскостей, то находим направляющие векторы из параметрических уравнений. Далее, находим угол через его косинус.
Если плоскости заданы неявными уравнениями
A |
x1 |
B |
x2 C |
1 |
x3 D |
0 ; |
|
|
|
|
|
||||||||||
1 |
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
A |
x1 |
|
B |
|
x2 C |
2 |
x3 D |
|
0 , |
|
|
|
|
|
|||||||
2 |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
то, учитывая, |
|
что |
координаты |
|
нормальных |
векторов |
равны |
соответственно |
|||||||||||||
A 1 , B 1 , C 1 и A 2 , B 2 , C 2 , угол между плоскостями находим из соотно- |
|||||||||||||||||||||
шения |
|
|
|
|
|
|
A 1 A 2 |
B 1 B 2 C 1 C 2 |
|
|
|
|
|||||||||
cos |
|
|
|
|
|
|
|
|
. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
A 2 |
B 2 |
|
C 2 |
A |
2 B 2 |
C |
|
2 |
|||||||||||
|
|
1 |
|
|
1 |
|
|
|
|
1 |
|
|
2 |
2 |
|
3 |
|
|
|||
Уравнение прямой линии, заданной пересечением двух плоскостей.
Пусть требуется найти параметрические или канонические уравнения прямой линии, заданной как множество точек пересечения двух плоскостей с неявными уравнениями:
A 1 x1 B 1 x2 C 1 x3 D 1 0 , A 2 x1 B 2 x2 C 2 x3 D 2 0 .
10
1. Проверяем, что плоскости пересекаются, то есть, что нормальные векторы неколлинеарны. Ищем направляющий вектор прямой линии и какуюлибо её точку.
2. Так как плоскости пересекаются по прямой, то её направляющий вектор ортогонален нормальным векторам обеих плоскостей. Поэтому
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
e 1 |
e 2 |
e 3 |
|
|
|
|
|
|
|
|
|
|
|||
a |
|
N |
1 , N 2 |
|
|
A |
B |
C |
1 |
. |
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
A 2 |
B 2 |
C 2 |
|
|
|
|
|
|
|
|
|
||||
3. Так как направляющий вектор прямой линии непарралелен хотя бы одной из координатных плоскостей, то в качестве точки на прямой линии выбираем точку пересечения этой прямой и координатной плоскости.
4. Подставляя координаты точки прямой и направляющего вектора в параметрические или канонические уравнения прямой, получаем ответ.
Координаты точки пересечения прямой линии |
L и плоскости |
H 2 . |
|||||||||||||||||
Пусть требуется |
найти координаты точки пересечения прямой |
линии |
L и |
||||||||||||||||
плоскости H 2 , заданных соответственно уравнениями |
|
|
|
|
|||||||||||||||
|
x1 x10 |
|
x2 x02 |
|
x3 x03 |
, A x1 B x2 C x3 |
D 0 . |
|
|||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
a1 |
|
|
|
a2 |
|
a3 |
|
|
|
|
|||||
Для решения этой задачи поступаем так. |
|
|
|
|
|||||||||||||||
1. Проверяем, что прямая линия не параллельна плоскости, то есть, что |
|||||||||||||||||||
направляющий вектор прямой |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a a1 e 1 |
a2 e 2 |
a3 e 3 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
не ортогонален нормальному вектору плоскости N A e 1 B e 2 |
C e 3 : |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a, N A a1 B a2 C a3 0 . |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2. Параметрические уравнения прямой линии имеют вид |
|
|
|
||||||||||||||||
x1 |
x10 a1 t, |
|
|
|
|
|
|
|
|||||||||||
|
2 |
x02 a 2 t, |
|
|
|
|
|
|
|
||||||||||
x |
|
|
|
|
|
|
|
||||||||||||
|
|
3 |
|
3 |
|
|
3 |
t. |
|
|
|
|
|
|
|
||||
x |
|
x0 a |
|
|
|
|
|
|
|
|
|||||||||
Подставляя эти выражения для координат точек прямой x1 , x2 , x3 в неявное уравнение плоскости, получаем уравнение относительно параметра t , решая которое, находим значение парамтра t t0 , при котором происходит пересечение прямой линии и плоскости.