

Вопросы для самоподготовки
Что означает масштаб длин кинематической схемы механизма?
Какую размерность имеет масштаб длин кинематической схемы механизма?
C какой целью строится кинематическая схема механизма?
Где используется кинематическая схема механизма?
Что называют планами положений механизма?
Какое положение механизма считают начальным (нулевым)?
C какой целью строятся планы положений механизма?
С какого положения механизма начинают построение планов положений механизма?
Как вычислить масштаб планов положений механизма?
Какое количество планов положений обычно строят для исследования механизма?
Как на схемах механизмов изображают шарниры?
Как на схемах механизмов изображают поступательные кинематические пары?
Определение степени подвижности плоских механизмов
Степень подвижности механизма – это степень свободы его кинематической цепи относительно стойки. Степень подвижности показывает, какое число ведущих звеньев должен иметь механизм для того, чтобы движение остальных звеньев механизма было однозначно определяемым. Формула для определения степени подвижности плоского механизма была впервые выведена П.Л.Чебышевым в 1869 году и носит название формулы Чебышева. Ее можно представить в виде
![]() ,
(1.1)
,
(1.1)
где
![]() – степень подвижности механизма;
– степень подвижности механизма;
![]() – количество подвижных звеньев;
– количество подвижных звеньев;
![]() –
количество низших кинематических пар
механизма,
–
количество низших кинематических пар
механизма,
![]() –количество
высших кинематических пар механизма.
–количество
высших кинематических пар механизма.
При рассмотрении схем механизмов и подсчете количества кинематических пар следует иметь в виду, что иногда на схеме две кинематические пары бывают совмещены. Например, на рис. 1.6, а изображено шарнирное соединение трех рычагов: 1, 2 и 3.
а) б)
Рис. 1.6. Изображение шарнирного соединения трех звеньев:
а) на чертеже; б) на кинематической схеме механизма
Подвижное
соединение рычагов 1 и 2 обозначено
![]() ,
а подвижное соединение рычагов 1 и 3
обозначено
,
а подвижное соединение рычагов 1 и 3
обозначено
![]() На кинематической схеме механизма
кинематические пары
и
На кинематической схеме механизма
кинематические пары
и
![]() совпадают (рис. 1.6, б).
совпадают (рис. 1.6, б).
У плоских механизмов все поступательные и вращательные кинематические пары являются низшими парами; в этих парах звенья контактируют по поверхности (плоской или цилиндрической). Высшие пары в плоских механизмах - это пары, в которых звенья контактируют по линии или в точке. Это, например, соединения зубьев зубчатых колес, соединения кулачков и толкателей.
Рассмотрим два примера определения степени подвижности плоского механизма.
Пример 1
Кинематическая схема шестизвенного плоского кулисного механизма изображена на рис.1.5, б.
Вычисляем степень подвижности механизма по (1.1).
Полное
количество звеньев
![]() Число
подвижных звеньев механизма
Число
подвижных звеньев механизма
![]() Число низших кинематических пар механизма
Число низших кинематических пар механизма
![]() Число высших кинематических пар
механизма
Число высших кинематических пар
механизма
![]() Степень подвижности механизма:
Степень подвижности механизма:
![]()
Механизм должен иметь одно ведущее звено для того, чтобы движение остальных его подвижных звеньев было однозначно определяемым.
Пример 2
Рассмотрим кинематическую схему семизвенного плоского зубчато-рычажного механизма поршневой машины (рис. 1.7).
Вычисляем степень подвижности механизма по (1.1).
Полное
количество звеньев
![]() Число
подвижных звеньев механизма
Число
подвижных звеньев механизма
![]() Число низших кинематических пар механизма
Число низших кинематических пар механизма
![]() Число высших кинематических пар
механизма
Число высших кинематических пар
механизма
![]() Степень подвижности механизма:
Степень подвижности механизма:
![]()
Механизм должен иметь одно ведущее звено для того, чтобы движение
остальных его подвижных звеньев было однозначно определяемым.
Следует иметь в виду, что механизмы могут содержать пассивные (повторяющиеся) связи и “лишние” степени свободы, не влияющие на движение механизма в целом и на закон движения ведомого звена. При вычислении степени подвижности механизма эти пассивные связи и лишние степени свободы не учитываются.
Пассивная
связь – связь в механизме, удаление
которой не меняет характер движения
звеньев механизма в целом.
Определим, например, степень подвижности
механизма параллельных кривошипов
(рис. 1.8), у которого EF=BC=DА,
BЕ=CF
и AE=DE.
Имеем:
=4;
![]() =6
(А, В, С, D,
E,
F);
=0.
=6
(А, В, С, D,
E,
F);
=0.
![]()

Рис. 1.7. Кинематическая схема зубчато-рычажного
механизма поршневой машины

Рис. 1.8. Схема механизма параллельных кривошипов
Степень подвижности получилась равной нулю, то есть все звенья кинематической цепи не должны иметь возможности двигаться относительно стойки. Однако на модели механизма можно убедиться, что звенья этого механизма имеют вполне определенные движения при одном ведущем звене. Значит, степень подвижности определена неверно.
Необходимо учесть, что механизм имеет пассивную связь – звено EF. Это полезная связь, позволяющая повысить нагрузочную способность механизма. В то же время удаление звена EF не меняет характер движения звеньев механизма в целом. Поэтому при расчете степени подвижности механизма звено EF не учитываем:
=3; =4 (А, В, С, D); =0.
![]() .
.
Лишними степенями свободы называются подвижности звеньев, не влияющие на степень свободы механизма в целом. Например, вращение роликов на их осях или вращение колец шариков подшипников. Такие пассивные подвижности вводятся в конструкцию механизма обычно для уменьшения износа элементов кинематических пар. Например, для кулачкового механизма на рис. 1.9 имеем:
=3; =3 (А, В, С); =1 ( D).
![]()
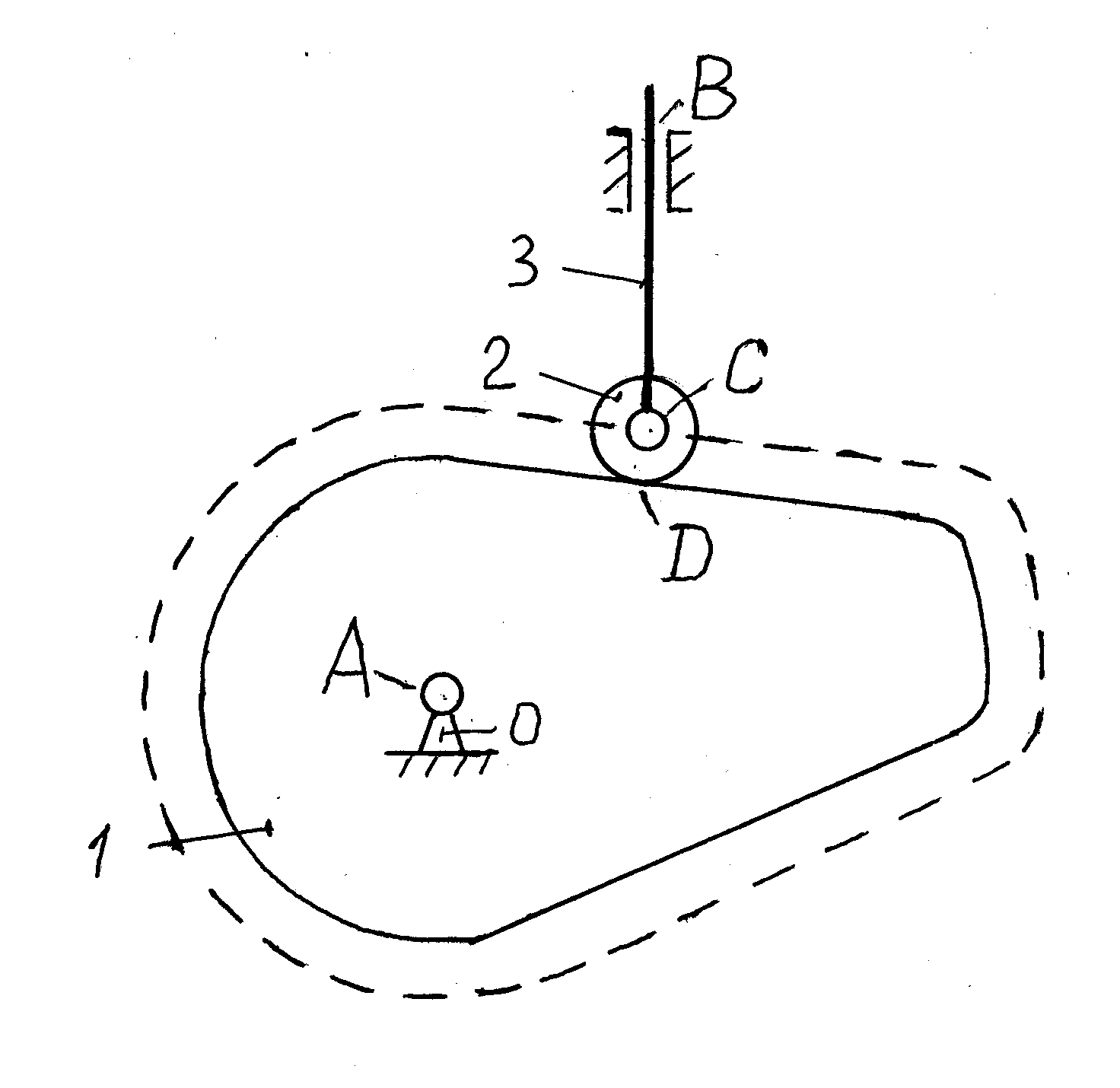
Рис. 1.9. Схема кулачкового механизма
Однако возможность ролика 2 поворачиваться вокруг своей оси С является лишней степенью свободы. Кинематика механизма не изменяется, если профиль кулачка увеличить на величину радиуса ролика (как показано штрихпунктирной линией), а ролик 2 и кинематическую пару С соединения ролика 2 с толкателем 3 удалить. Поэтому степень подвижности этого механизма необходимо вычислять так:
=2; =2 (А, В); =1 (D).
![]()
При нулевой степени подвижности кинематической цепи ни одно из звеньев не может двигаться относительно неподвижного звена (стойки) и кинематическая цепь превращается в ферму.
Степень подвижности механизма не может быть равна нулю. Степень подвижности механизма или равна, или больше единицы и показывает, сколько звеньев механизма должны быть ведущими, чтобы движение остальных подвижных звеньев относительно стойки было определенным.