

КАМЕРАЛЬНЫЕ РАБОТЫ ПРИ ТЕОДОЛИТНОЙ СЪЕМКЕ
Камеральными работами называют обработку теодолитной съемки, получение координат вершин теодолитного хода и чертежные работы по составлению и вычерчиванию ИТП земельного участка. Камеральные работы начинаются с проверки всех полевых вычислений. Проверяют правильность измеренных горизонтальных углов в полуприемах и средних значений углов. Вычисляют средние значения измеренных линий D и их горизонтальные проложения d (проекции линий D на горизонтальную плоскость для линий, имеющих угол наклона v более 1° 30´). Горизонтальные проложения вычисляются по формуле d = D · cos v.
Пример:
Среднее значение линии из прямого и обратного ее измерения равно 153,67 м. Линия имела угол наклона v = 2° 30´. Вычислить ее горизонтальное проложение. Горизонтальное проложение линии будет d = 153,67 · cos 2° 30´ = 153,52 м.
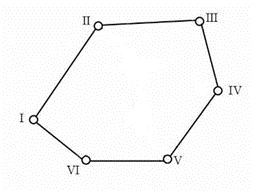
Рис. 1. Схема замкнутого теодолитного хода
Таблица 1
Журнал измерений в замкнутом ходе
№ точек стояния |
№ визируемых предметов |
Отсчеты |
Угол |
Среднее из углов |
Мера линий |
Угол наклона |
|||
º |
' |
º |
' |
º |
' |
||||
I
|
VI II VI II |
261 160 82 341 |
11,5 01,5 36,0 25,0 |
101
101 |
10,0
11,0 |
101 |
10,5 |
335,30 |
2º00' |
II |
I III I III |
175 57 356 238 |
27,5 24,5 05,5 02,0 |
118
118 |
03,0
03,5 |
118 |
03,2
|
335,38
177,81 |
0-82
0º 50' |
III |
II IV II IV |
246 143 68 325 |
47,5 16,0 38,5 07,0 |
103
103 |
31,5
31,5 |
103 |
31,5 |
177,77
257,31 |
0-177,79
0º50' |
IV |
III V III V |
177 53 358 235 |
03,0 41,0 41,5 19,5 |
123
123 |
22,0
22,0 |
123 |
22,0 |
257,26
185,84 |
0-257,28
0º40´ |
V |
IV VI IV VI |
145 14 326 195 |
41,5 40,5 17,5 15,5 |
131
131 |
01,0
02,0 |
131
|
01,5 |
185,80
166,60 |
0-185,82
0º20' |
VI |
V I V I |
271 129 93 310 |
57,0 07,5 03,5 14,0 |
142
142 |
49,5
49,5 |
142 |
49,5 |
166,57
132,14 |
0-166,58
0º26' |
|
|
|
|
|
|
|
|
132,10 |
0-132,12 |
Вычисление дирекционных углов сторон и координат вершин основного замкнутого теодолитного хода
1.1. Подготовка исходных данных и занесение
их в ведомость вычисления координат
Вычисление координат точек выполняется в специальной ведомости по образцу, при- веденному в табл. 4.
Подготовка исходных данных заключается в выполнении следующих действий:
- из полевого журнала выписываются средние значения измеренных горизонтальных углов (с точностью 0,1´) и вычисленные горизонтальные проложения длин сторон (с точностью 0,01 м.)
- записывается заданный преподавателем дирекционный угол стороны теодолитного хода 1-2 (с точностью 0,1´) и координаты первой точки хода ХI и YI (с точностью 0,01 м.)
1.2. Вычисление угловой невязки, исправленных углов,
дирекционных углов и румбов сторон
Из журнала теодолитной съемки в графу 2 ведомости выписываются измеренные горизонтальные углы хода, в графу 6 – горизонтальные проложения линий.
В графу 4 ведомости записывается заданный преподавателем дирекционный угол начальной стороны теодолитного хода 1-2 (с точностью 0,1´), в графу 11 и 12 - координаты первой точки хода ХI и YI. (ХI = +500,00; YI. = +500,00)
После этого вычисляется угловая невязка и, если она допустима, ее распределяют на измеренные углы для получения исправленных углов, сумма которых должна равняться теоретической сумме углов полигона.
В графе 2 подсчитывают сумму измеренных углов Ʃβизм и вычисляют их теоретическое значение по формуле:
Ʃβт = 180º (n – 2), где n – число углов в замкнутом ходе.
Вычисляют угловую невязку fβ по формуле: fβ = Ʃβизм – Ʃβт.
В нашем примере:
Ʃβизм. = 719°58,2´;
Ʃβт. = 720°00,0´;
fβ = -1,8´.
Определяют допустимую угловую невязку по формуле:
fβ доп. = 2 t √n = 2 · 0,5´ · √n,
fβ
доп. =
![]()
где n – число углов хода;
t – точность прибора.
По этой формуле получим, что допустимая угловая невязка при n = 6
fβ доп. = 1´· √6 = ± 2,4´.
Если fβ < fβ доп. , то это означает, что невязка допустима.
В нашем примере:
fβ = -1,8´ < fβ доп. = 1´· √6 = ± 2,4´. Невязка допустима
Если fβ меньше или равна предельной, то ее распределяют в измеренные углы поровну, со знаком, противоположным знаку невязки, с округлением до 0,1'. Поправки, для сокращения объема записи, записывают над значениями измеренных углов в десятых долях минут.
Контроль подсчета поправок: сумма поправок должна равняться невязке с противоположным знаком, т.е. Ʃvβ = –fβ.
В примере углы получают поправку vβ = +0,3'.
Вычисляют исправленные углы:
βиспр = βизм + vβi.
Контролируют правильность вычисления исправленных углов: сумма исправленных углов должна равняться теоретической, т.е.
Ʃβиспр = Ʃβтеор.
По дирекционному углу исходной стороны α I-II и исправленным углам вычисляют дирекционные углы всех сторон по правилу: дирекционный угол последующей стороны хода равен дирекционному углу предыдущей стороны плюс 180º и минус исправленный угол, заключенный между этими сторонами, справа по ходу лежащий. При вычислениях может оказаться, что сумма дирекционного угла предыдущей стороны плюс 180° будет меньше, чем угол, справа по ходу лежащий, тогда к указанной сумме добавляется 360°. Может также оказаться, что дирекционный угол получился больше 360°, тогда из него вычитают 360°.
Вычисление дирекционных углов контролируется повторным нахождением дирекционного угла линии I–II. Для этого к дирекционному углу линии VI–I следует прибавить 180º и вычесть горизонтальный угол в точке I. Вычисленный таким образом дирекционный угол должен равняться исходному.
α I-II = α VI-I + 180° - β I
Дирекционные углы переводят в румбы, согласно табл. 2, и записывают в графу 5 ведомости координат (табл. 4).
Таблица 2
Перевод дирекционных углов в румбы
Дирекционный угол |
Название румба |
Градусная величина румба |
0º < α < 90º 90º < α < 180º 180º < α < 270º 270º < α < 360º |
СВ
ЮВ
ЮЗ
СЗ |
r = α r = 180º – α r = α – 180º r = 360º – α |