

книги / Системы управления электромеханическими исполнительными механизмами
..pdf3.Убедиться, что блок прочно закреплен на вертикальной поверхности.
4.Убедиться, что заземляющий проводник присоединен к болту заземления на корпусе блока.
5.Подсоединить блок к сети и электроприводу в соответствии с рис. 2.11. Подсоединить цепи управления. Цепи управления должны прокладываться отдельно от силовых цепей.
6.Подать напряжение на блок и убедиться в его функционировании (светодиод «Готов» горит постоянно).
7.Подключить пускатель к компьютеру с помощью microUSB-кабеля и запустить на компьютере программу MST Loader. Данная возможность позволяет протестировать алгоритмы работы блока до подключения внешнего контроллера, в том числе имитировать различные режимы дублированного управления. Выполнить настройку и тестирование блока с помощью про-
граммы MST Loader.
8.Ознакомиться с областью программируемых параметров, которая включает 109 уставок П001…П109, соответствующих адресам Modbus 0x0001...0x006D. Область программируемых параметров может быть прочитана или записана за одну транзакцию чтения или записи. Для зарезервированных или отсутствующих в списке параметров значение для записи должно быть 0. Перечень и описание всех программируемых параметров приведены в Приложении Б [7], а также в таблице настроек в програм-
ме MST Loader.
9.Выписать значения основных параметров, касающихся функций контроля сигналов состояния электропривода, см. таб-
лицу 8 [7]:
–сигналы концевых выключателей КВЗ и КВО;
–обобщенный сигнал моментных выключателей МВ;
–аналоговый вход датчика положения;
–вход термодатчика ЭД.
10.Установить приоритет № 2 источников команд управления из программы для ПК MST Loader (тип управления по USB).
41
Источник действующей команды отображается в регистре 0x1500 (биты 2…6) (табл. 14 [7]). Одновременно может быть активен только один из источников в соответствии с заданным приоритетом. Результирующие команды управления «Закрыть» и «Открыть» отображаются в регистре 0x1503 (бит 14 и 15).
11.Реализовать варианты дискретного управления в соответствии с табл. 2.2. Убедиться в правильности отработки команд управления электроприводом по сети от ПК во всех режимах непрерывного и дискретного управления, включая режим позиционирования.
12.Отключить блок МСТ-351А от сети.
|
|
Таблица 2.2 |
|
Варианты дискретного управления |
|||
|
|
|
|
Тип управления |
Используемые |
Необходимые |
|
входы |
настройки |
||
|
|||
Постоянные сигналы |
Зкр, Отк |
П003 = 1 – тип дис- |
|
«Закрыть/Открыть» |
|
кретного управления: |
|
|
|
постоянные сигналы |
|
Импульсные сигналы |
Зкр, Отк |
П003 = 2 – тип дис- |
|
«Закрыть/Открыть» |
|
кретного управления: |
|
(самоподхват) |
|
импульсные сигналы. |
|
|
|
П004 = 1, 2 – входы |
|
|
|
концевых выключате- |
|
|
|
лей активны |
|
Импульсные сигналы |
Зкр, Отк + |
П003 = 2 – тип дис- |
|
«Закрыть/Открыть/Стоп» |
+ М1 или М2 |
кретного управления: |
|
(самоподхват) |
|
импульсные сигналы. |
|
|
|
П004 = 1, 2 – входы |
|
|
|
концевых выключате- |
|
|
|
лей активны. |
|
|
|
П005 = 3…5 или |
|
|
|
П006 = 3…5. |
|
|
|
Сигнал «Стоп» назна- |
|
|
|
чается на М1 или М2 |
|
42 |
|
|
|
|
|
Окончание табл. 2.2 |
|
|
|
|
|
Тип управления |
Используемые |
Необходимые |
|
входы |
настройки |
||
|
|||
Сигналы «Фиксированное |
М1, М2 или |
П005 = 9 и (или) |
|
положение» |
комбинация |
П006 = 10 – функция |
|
|
М1 + М2 |
«Фиксированное по- |
|
|
|
ложение» на входах |
|
|
|
М1 и (или) М2. |
|
|
|
П004 = 1, 2 – входы |
|
|
|
концевых выключате- |
|
|
|
лей активны. |
|
|
|
П020 = 1, 2 – вход |
|
|
|
датчика положения |
|
|
|
активен. |
|
|
|
П027…П029 – 3 устав- |
|
|
|
ки фиксированного |
|
|
|
положения |
Содержание отчета
1.Титульный лист, отвечающий требованиям к оформлению лабораторных работ.
2.Функциональная схема блока МСТ-351А.
3.Схема подключения блока МСТ-351А к электроприводу.
4.Основные функциональные возможности использования прилагаемого ПО – программы MST Loader.
5.Привести результаты тестирования состояния ЭП с применением программы MST Loader.
6.Привести значения настроечных параметров при четырех типах дискретного управления.
7.Выводы по результатам исследований.
Контрольные вопросы
1.Привести обобщенную функциональную схему и основные технические характеристики интеллектуального блока МСТ-351А управления электроприводом.
2.Привести схему подключения блока МСТ-351А к электроприводу.
43
3.Привести основные характеристики программного обеспечения – программы MST Loader.
4.Дать краткую характеристику возможным вариантам дискретного управления электроприводом.
5.Дать краткую характеристику возможным вариантам сетевого управления электроприводом.
6.Дать характеристику приоритетов источников команд управления.
7.Перечислить функции контроля концевых и моментных выключателей.
8.Перечислить функции, связанные с контролем сигналов датчика положения (ДП) электропривода.
9.Дать характеристику расширенным функциям управления электродвигателем (плавный пуск, DC-торможение с ограничением тока) и контроля текущих параметров электропривода.
10.Объяснить назначение органов индикации и управления на лицевой части блока МСТ-351А.
44
3. ЛАБОРАТОРНЫЙ ПРАКТИКУМ ПО СУИМ ПЕРЕМЕННОЙ СКОРОСТИ
СУИМ переменной скорости, по сути, представляют собой регулируемые электроприводы постоянного и переменного тока или, иными словами, системы управления электроприводами. Эти электромеханические системы управления имеют достаточно широкий диапазон регулирования скорости вращения, достигающий и даже превышающий в ряде случаев 10 000, что требует решения достаточно сложных задач проектирования устройства управления скоростью или положением рабочего органа механизма (рабочей машины). В общем случае при проектировании ЭМСУ с изменяемой скоростью электропривода требуется последовательно решить следующие задачи:
–определение математической модели (ММ) электромеханического объекта управления (ЭМОУ), отражающей его доминирующие физико-механические свойства, существенные с точки зрения инженерной задачи управления им;
–формулирование критериев качества управления, отвечающих современным требованиям функционирования технологического процесса (установки), как правило, закрепленных в техническом задании на проектирование ЭМСУ;
–структурный синтез ЭМСУ;
–параметрический синтез ЭМСУ.
Последние две задачи, как правило, объединяют в одну задачу структурно-параметрического синтеза.
Лабораторный практикум направлен на овладение компетенциями, приведенными в рабочих программах по дисциплинам «СУИМ» и «СУЭП» и включает пять лабораторных работ, призванных закрепить знания и получить умения и навыки решения сформулированных выше задач.
В лабораторной работе № 4 рассматриваются различные формы описания ЭМОУ с применением электродвигателей постоянного тока постоянного возбуждения применительно к двум
45
основным координатам электропривода – скорости вращения (рад/с) и угловому положению вала электропривода (рад). Исходные структуры ЭМОУ заданы в форме структурных схем, преобразованные формы описания представлены в форме системы обыкновенных дифференциальных уравнений (ОДУ) в нормальной форме Коши и в форме векторно-матричных уравнений (ВМУ) состояния [9–14].
Влабораторных работах № 5 и № 6 рассмотрены вопросы исследования ЭМСУ с регуляторами состояния [9, 13, 14] и порядок работы с компьютерной программой «Исследование САУ», приведенный в приложениях А, Б.
Влабораторных работах № 7 и № 8 рассмотрены вопросы исследования ЭМСУ скоростью и положением РО механизмов с регуляторами класса «вход – выход» [9, 11, 12]. Анализ ЭМСУ проводится с применением широко распространенной в инженерной практике исследования САУ интегрированной среды
Matlab/Simulink.
Лабораторная работа № 4. Математические модели электромеханических объектов управления
Цель работы – ознакомление студентов с основными формами математического описания электромеханических объектов управления в линейной области на примере электроприводов постоянного тока, а также формирование у студентов умений и навыков преобразования математических моделей ЭМОУ из одной формы в другую.
Краткие теоретические сведения и описание работы
Скорость движения рабочих органов (РО) исполнительных механизмов (ИМ) – одна из основных управляемых координат электромеханических СУИМ. Управление угловой или линейной скоростью движения РО осуществляется посредством электриче-
46
ских исполнительных механизмов переменной скорости. Как правило, такие СУИМ работают по принципу объемного регулирования, изменяя скорость перемещения потока технологической среды с помощью насосов, компрессоров, вентиляторов и др. В качестве приводов ИМ применяют приводы как постоянного, так и переменного тока. В последние годы наблюдается устойчивая тенденция использования частотно-регулируемых асинхронных и синхронных электроприводов ИМ, а также высокоэнергоэффективных вентильных электроприводов [13].
Другой не менее важной выходной переменной ЭМОУ является положение РО механизмов. При этом в СУИМ переменной скорости, работающих на ЗРА по принципу дросселирования, реализуют плавное изменение положения РО и, соответственно, проходного сечения трубопровода. Тем самым меняют объемный или массовый расход технологической среды. Гораздо чаще вопросы регулирования положения РО возникают в системах управления движением роботов-манипуляторов, позиционно-траекторных и транспортных систем, следящих ЭМСУ и др. [10, 13, 14].
Ниже рассмотрены ММ ЭМОУ на основе коллекторных электродвигателей постоянного тока с независимым возбуждением [9,10,13], однако формы представления ММ ЭМОУ с другими типами электродвигателей, по сути, аналогичны.
Порядок выполнения работы
иметодические указания
1.Получить от преподавателя задание на выполнение лабораторной работы, включающее перечень структур ЭМОУ и номер варианта параметров ЭМОУ. Перечень конкретных структур
иперечень параметров ЭМОУ задаются преподавателем в персонифицированном порядке каждому студенту, в том числе при дальнейшем выполнении лабораторных работ № 5–8.
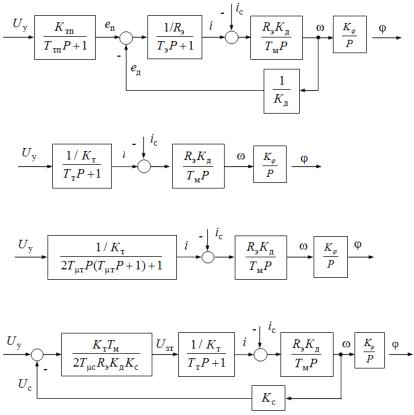
Исходные ММ ЭМОУ скоростью и положением рабочего органа АЭП или регулирующего органа ИМ представлены в форме восьми структурных схем на рис. 3.1, 3.2. Численные зна-
47
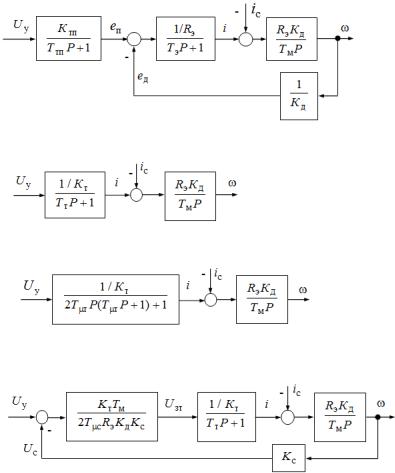
чения параметров ЭМОУ приведены для 17 вариантов задания в табл. 3.1. Еще ряд значений параметров ЭМОУ в соответствии с теорией АЭП и общей теорией ЭМСУ [13] целесообразно принять следующими: Т с = Тт = 2Т т, Кс = (5…10)/ н.
а
б
в
г
Рис. 3.1. Структурные схемы электромеханических объектов управления скоростью рабочего органа
48
а
б
в
г
Рис. 3.2. Структурные схемы электромеханических объектов управления положением рабочего органа
Таблица 3.1 Параметры ЭМОУ для заданных вариантов
№ |
|
|
|
|
|
|
ПараметрыЭМОУ |
|
|
|
|
|
|||
вар. |
Uян, |
Iян, |
, |
н, |
Uу, max, |
Rэ, |
Kд, |
Тэ, |
Тм, |
Kтп, |
Ттп, |
Kт, |
Т т, |
K , |
T, |
п/п |
В |
А |
о.е. |
1/с |
В |
Ом |
Вс |
с |
с |
о.е. |
с |
Ом |
с |
о.е. |
с |
1 |
52 |
15 |
5 |
62,8 |
10 |
0,5 |
1,4 |
0,01 |
0,1 |
10 |
0,0075 |
0,083 |
0,01 |
10 |
0,03 |
2 |
52 |
15 |
5 |
62,8 |
10 |
0,5 |
1,4 |
0,01 |
0,1 |
10 |
0,0075 |
0,067 |
0,0075 |
10 |
0,025 |
3 |
110 |
75 |
4 |
62,8 |
10 |
0,1 |
0,613 |
0,01 |
0,2 |
15 |
0,0075 |
0,017 |
0,0075 |
1 |
0,025 |
4 |
110 |
75 |
4 |
105 |
10 |
0,1 |
1,024 |
0,015 |
0,25 |
15 |
0,0075 |
0,017 |
0,01 |
10 |
0,03 |
5 |
220 |
50 |
2,5 |
157 |
10 |
0,3 |
0,766 |
0,015 |
0,1 |
30 |
0,01 |
0,08 |
0,015 |
1 |
0,04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
49 |
Окончание табл. 3.1
№ |
|
|
|
|
|
|
ПараметрыЭМОУ |
|
|
|
|
|
|||
вар. |
Uян, |
Iян, |
, |
н, |
Uу, max, |
Rэ, |
Kд, |
Тэ, |
Тм, |
Kтп, |
Ттп, |
Kт, |
Т т, |
K , |
T, |
п/п |
В |
А |
о.е. |
1/с |
В |
Ом |
Вс |
с |
с |
о.е. |
с |
Ом |
с |
о.е. |
с |
6 |
220 |
50 |
2 |
105 |
10 |
0,4 |
0,525 |
0,025 |
0,4 |
30 |
0,0075 |
0,1 |
0,01 |
1 |
0,03 |
7 |
440 |
200 |
2,5 |
157 |
10 |
0,1 |
0,374 |
0,02 |
0,5 |
60 |
0,01 |
0,02 |
0,01 |
1 |
0,025 |
8 |
440 |
200 |
2 |
105 |
10 |
0,1 |
0,25 |
0,03 |
0,45 |
60 |
0,01 |
0,025 |
0,008 |
10 |
0,025 |
9 |
600 |
1000 |
2 |
78,5 |
10 |
0,04 |
0,14 |
0,025 |
0,05 |
80 |
0,01 |
0,004 |
0,01 |
20 |
0,04 |
10 |
600 |
1000 |
2,5 |
78,5 |
10 |
0,04 |
0,14 |
0,02 |
0,04 |
80 |
0,01 |
0,004 |
0,01 |
20 |
0,04 |
11 |
440 |
100 |
2,5 |
105 |
10 |
0,25 |
0,253 |
0,015 |
0,2 |
50 |
0,0075 |
0,04 |
0,0075 |
1 |
0,025 |
12 |
440 |
100 |
2 |
105 |
10 |
0,25 |
0,253 |
0,015 |
0,2 |
50 |
0,0075 |
0,05 |
0,0075 |
10 |
0,025 |
13 |
220 |
20 |
2,5 |
157 |
10 |
1,5 |
0,826 |
0,025 |
0,15 |
30 |
0,0075 |
0,2 |
0,01 |
10 |
0,025 |
14 |
220 |
20 |
2 |
105 |
10 |
1,5 |
0,553 |
0,02 |
0,1 |
30 |
0,0075 |
0,25 |
0,01 |
1 |
0,025 |
15 |
440 |
160 |
2,0 |
157 |
10 |
0,3 |
0,4 |
0,025 |
0,2 |
75 |
0,01 |
0,031 |
0,01 |
1 |
0,025 |
16 |
220 |
10 |
2,5 |
157 |
10 |
1,0 |
0,75 |
0,02 |
0,1 |
30 |
0,0075 |
0,4 |
0,01 |
10 |
0,025 |
17 |
220 |
10 |
2 |
157 |
10 |
1,0 |
0,75 |
0,02 |
0,1 |
30 |
0,0075 |
0,5 |
0,01 |
1 |
0,025 |
2. По структурной схеме ЭМОУ для заданного варианта составить описание ЭМОУ в форме системы обыкновенных дифференциальных уравнений (ОДУ). При этом с целью «мягкого» перехода к следующему этапу – описания ЭМОУ в векторно-матричной форме– целесообразновоспользоватьсянормальнойформой Коши.
Например, для ЭМОУ положением РО по структурной схеме, приведенной на рис. 3.2, а, при замене оператора p Лапласа на оператор дифференцирования имеем [9]
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K ; |
|
|
|
|
|
|||||||||
|
|
|
|
RэKд |
|
|
|
|
|
|
||||
|
|
|
(i iс); |
|
|
|
|
|||||||
|
|
|
|
|
Tм |
|
|
|
|
|
||||
|
|
|
1 |
|
|
1 |
|
1 |
|
|
|
|||
|
|
|
|
|
|
|
||||||||
i |
|
|
|
|
(Eп |
|
|
) i |
|
; |
||||
T |
|
R |
K |
д |
||||||||||
|
|
|
|
э |
|
э |
|
|
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
|
|
|
|||
E |
T |
|
(K U |
(kT ) E ) . |
||||||||||
|
п |
|
|
|
|
тп у |
|
|
п |
|
|
|||
|
|
|
|
|
|
тп |
|
|
|
|
|
|
|
|
3. По полученным ОДУ составить ММ ЭМОУ в форме век- торно-матричного уравнения состояния ЭМОУ, причем матрицы состояния, управления и возмущения для заданных преподавателем структур и параметров ЭМОУ необходимо привести в обоб-
50