

книги / Механизмы затворов ствольного оружия. Основы теории, расчета и проектирования
.pdfЧасто используется принцип последовательного или параллельного соединения нескольких пружин в упругую систему, действие которой определяется приведенными значениями усилий. Приведенные усилия соответственно при параллельном и последовательном соединении звеньев определяются по формулам:
n |
|
|
|
|
Ппр = ∑(Пнi + ci wi ); |
||||
i=1 |
|
|
|
(1.25) |
|
|
|
|
|
n |
|
1 |
|
|
Ппр = ∑Пнi |
+ |
|
wi . |
|
|
|
|||
n |
1 |
|||
i =1 |
|
∑ |
|
|
|
|
|
||
|
|
i=1 ci |
|
|
При смешанном соединении |
пружин их действие сводится |
|||
к двум рассмотренным случаям, причем вначале рассчитываются отдельные цепи параллельно соединенных пружин, а затем последовательно соединенные в каждой цепи.
Жесткость пружины рассчитывается по формуле |
|
|||
c = |
G d 4 |
, |
(1.26) |
|
8 D3n |
||||
|
|
|
||
где G – модуль сдвига, для пружинных сталей G = 8 1010 Па; D – |
||||
средний диаметр пружины; d – диаметр проволоки; n – |
количество |
|||
витков. |
|
|
||
Работа пружин сопровождается потерями механической энергии на внутреннюю деформацию материала, колебания витков, трение витков о направляющие и т.д. В первом приближении эти потери можно учесть поправочным коэффициентом τп при определении усилия пружины:
П= τп (Пн +сw).
Выбор коэффициента τп основывается на положении, что при сжатии пружины, когда она противодействует движению звеньев, эти потери характеризуют дополнительное поглощение пружиной части энергии подвижных звеньев и действительное усилие пружины увеличивается (τп = τп(+) = 1,2…1,4).
31

Если же пружина разжимается и разгоняет звенья, потери связаны с уменьшением создаваемого усилия и снижением части ее энергии, затрачиваемой на движение звеньев (τп = τп(–) = 0,7…0,8).
Как правило, одна и та же пружина работает в двух режимах: сжимания и разжимания, что соответствует либо рабочему, либо холостому ходу звена, и между начальными значениями усилий существует простая связь:
Пн(+) = Пн(–) – сwп и Пн(–) = Пн(+) + сwп,
где wп – полный ход (деформация) пружины.
Затраты энергии пружины при ее деформации на одном и том же участке движения в противоположных режимах связываются соотношением:
Еп(+) = (τп(+)/τп(–) )Еп(–) .
Движение ползунов под действием пружин должно рассматриваться совместно с движением витков самой пружины. Движение витков пружины носит колебательный характер, их скорости различны, и в приближенном расчете принимается, что закон изменения скорости витков по длине lп пружины линейный. Скорость витка у опоры равна нулю, а скорость витка у ползуна соответствует скорости самого ползуна V0.
Скорость витка на расстоянии x от опоры V (x) = V |
x |
. |
|
|
|||
п |
0 l |
||
|
|
п |
|
Масса участка пружины на длине x от опоры dmп = mп dx . lп
Кинетическая энергия участка пружины на длине x
dE |
|
= |
1 |
|
mп |
dxV 2 |
(x) = |
1 |
|
mп |
|
x2 |
V 2 dx, |
|
2 l |
2 l |
|
l 2 |
|||||||||
|
x |
|
п |
|
|
0 |
|||||||
|
|
|
|
|
п |
|
|
|
|
п |
|
п |
|
E= 1 mп V 2 ∫ x2 dx.
x2 lп3 0
Интегрируя последнее выражение по всей длине пружины в пределахотx = 0 доx = lп, получимэнергиюдвижениявсейпружины:
32

E = |
1 |
|
mп |
V0 |
2 . |
(1.27) |
|
3 |
|||||
2 |
|
|
|
|||
Следовательно, в расчетах для учета пружины, связанной с поступательным движением ползуна, к массе ползуна необходимо добавлять треть от массы пружины.
При динамическом сжатии (растяжении) пружины возникающие в ней напряжения зависят от скорости деформации. Воздействие ползуна на свободный конец пружины вызывает появление волны деформации, распространяемой в сторону опоры. Известно, что скорость распространения волны деформации в пружине определяется выражением
υ = l |
c |
. |
|
||
п |
m |
|
|
п |
|
Тогда время пробега волны по пружине
tп = |
lп |
= |
mп |
. |
υ |
|
|||
|
|
c |
||
Время пробега волны деформации необходимо учитывать при расчете пружин, работающих в динамическом режиме. При больших скоростях сжатия пружины (V0 ≥ 7,5 м/с) масса пружины должна быть такой, чтобы за время максимального сжатия пружины волна деформации, отраженная от опоры, не успела возвратиться к ползуну. При меньших скоростях сжатия многократное отражение волны от опоры или ползуна позволяет вести расчет пружин так же, как для статического режима.
Масса пружины рассчитывается по формуле
m = π D π d 2 ρ n,
п |
4 |
|
где ρ – плотность материала пружины. Из выражения (1.26)
n = G d 4 . 8 D3c
С учетом этого
33
m = |
π 2 d 6Gρ |
. |
|
|
||||||||
|
|
|
|
|
||||||||
п |
|
|
|
32D2c |
|
|||||||
Отсюда скорость распространения волны |
|
|||||||||||
υ = |
|
π d 3 ρ |
G |
. |
|
|
||||||
|
c D |
|
|
|
|
|
||||||
|
|
32 |
|
|
|
|
||||||
Диаметр проволоки пружины |
|
|
|
|
|
|
||||||
d = |
3 |
υ c D |
|
32 |
. |
(1.28) |
||||||
|
|
|||||||||||
|
|
|
|
π |
ρ G |
|
||||||
При известном полном рабочем ходе пружины wп время tп можно определить приближенно:
tп = wп . V0
Время пробега волны деформации определяется исходя из следующих условий:
1,67 ≤ |
tп |
≤ |
2,0, если 7,5 ≤ |
V0 ≤ |
15 м/с; |
|||
|
|
|||||||
|
υ |
|
|
|
|
|
|
|
3,33 ≤ |
tп |
≤ |
4,0, если 6, 0 ≤ |
V0 ≤ |
7, 5 м/с; |
|||
|
||||||||
|
υ |
|
|
|
|
|
|
|
5,0 ≤ |
tп |
≤ |
6,0, если V0 ≤ |
6, 0 |
м/с. |
|||
|
||||||||
|
|
|
|
υ |
|
|
|
|
1.4. Оружейные гильзы и их функционирование при выстреле
Характер функционирования гильзы в камере ствола при выстреле существенно влияет на рабочие процессы как запирающего, так и гильзовыбрасывающего механизма. Следствиями осевой и радиальной деформации стенок гильзы при выстреле являются ее осевое смещение и возникновение усилия прижатия к стенкам камеры, что реально отражается на значениях действительных нагру-
34
зок на ЗПМ, осевой и радиальной прочности гильзы, условиях обеспечения ее свободной экстракции и нагрузках на детали гильзовыбрасывающего механизма.
Следует отметить, что процессы деформации и движения гильзы в оружии с замкнутыми ЗПМ, т.е. в системах с отдачей ствола, и со свободными ЗПМ существенно отличаются.
Для замкнутых ЗПМ осевая деформация гильзы относительно мала и обусловлена только жесткостью деталей узла запирания. Тем не менее расчет продольной прочности гильзы необходим.
Наличие растягивающего осевого нагружения стенок гильзы обусловлено действием давления газов на дно канала ствола и силами трения от давления прижатия боковой поверхности гильзы к стенкам камеры. Из-за технологических условий гильза перед выстрелом располагается в камере с осевым и радиальным зазорами.
В большинстве случаев осевой зазор выбирается полностью при радиальной деформации гильзы до момента ее прижатия к стенкам камеры и гильза смещается в осевом направлении практически не деформируясь. При этом радиальная деформация гильзы может перейти из упругой в пластическую зону. Это так называемый первый период функционирования гильзы.
Далее во втором периоде происходит одновременная радиальная деформация гильзы и ствола до момента максимальной внутренней нагрузки.
Третий период характеризуется падением давления в канале и совместной разгрузкой гильзы и ствола, стенки ствола возвращаются в исходное положение.
Вчетвертом периоде в гильзе продолжается падение радиальных напряжений, что приводит к возникновению конечного радиального зазора.
Взависимости от действующей нагрузки, радиуса гильзы и ее толщины возможны два режима ее радиальной деформации:
1. Гильза нагружается только в области упругих деформаций. При этом конечный радиальный зазор равен по своей величине начальному.
35
2. Гильза нагружается в зонах упругих и пластических деформаций, вследствие чего после полного снятия нагрузки появляются радиальные остаточные деформации, и конечный зазор больше начального.
Для систем со свободным (незамкнутым) ЗПМ радиальная и осевая деформация, а также продольное смещение гильзы происходят одновременно.
Процесс радиальной деформации по своей сути аналогичен ранее описанному и включает те же четыре периода. Однако осевая деформация может достигать значительных величин, что создает опасность продольного разрыва гильзы.
1.4.1. Расчет радиальных деформаций гильзы и оценка условий ее свободной экстракции
Расчет радиальных деформаций в стенках гильзы основан на теории нагружения тонкостенных цилиндрических оболочек, имеющих средний радиус rг и толщину боковой стенки hг. Радиальные напряжения в гильзе
σ |
г |
= |
rг |
( p |
− |
p ), |
(1.29) |
|
|||||||
|
|
hг |
дн |
к |
|
||
|
|
|
|
|
|
||
где pдн – давление на дно канала ствола (в камере); pк – контактное давление между гильзой и камерой.
Контактное давление (давление прижатия) создает радиальную внутреннюю нагрузку на ствол в области камеры (патронника). Согласно теории прочности для толстостенных труб, радиальные деформации стенок ствола связаны с внутренним давлением соотношением:
∆ r = |
2 p |
|
2 r 2 |
+ r |
2 |
r или |
∆ r = |
с |
|
|
к |
|
c |
к |
|
p , |
(1.30) |
||||
3 E r 2 |
− r 2 |
|
||||||||
к |
|
к |
к |
к |
к |
|
||||
|
|
|
c |
к |
|
|
|
|
|
|
где rк, rс – радиус камеры и наружный радиус ствола в области камеры соответственно; ск – коэффициент податливости стенок камеры,
с |
= |
2 |
|
2 r 2 |
+ r |
2 |
|
|
|
c |
к |
|
r . |
||
3 E |
r 2 |
− r 2 |
|
||||
к |
|
|
к |
||||
|
|
|
|
c |
к |
|
|
36
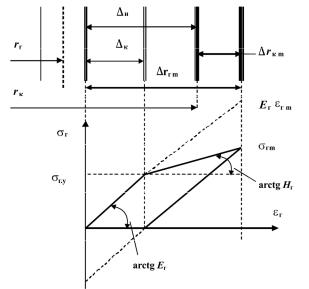
На рис. 1.15 показана расчетная схема процессов нагружения и разгрузки стенок гильзы и камеры в зонах упругих и пластических деформаций. На нем использованы следующие обозначения: ∆н, ∆к – начальный и конечный зазоры между гильзой и камерой; ∆rг m, ∆rкm – максимальные радиальные деформации стенок гильзы и стенок камеры; Eг, Hг – модуль упругости и модуль пластичности материала гильзы; σг.у – предел упругости материала гильзы; σг m – максимальные радиальные напряжения в гильзе; εг – относительная радиальная деформация стенок гильзы.
Рис. 1.15. Расчетная схема радиального нагружения и деформации гильзы
Величина начального зазора
|
|
|
h |
|
|
∆ н= |
rк− |
rг+ |
г |
. |
(1.31) |
|
|||||
|
|
|
2 |
|
|
Уравнение разгрузочной прямой имеет вид функции
σ |
г |
= Eε |
+ σ( |
− |
εE |
г |
m |
). |
(1.32) |
|
г |
г |
г m |
г |
|
|
37
Поскольку σ |
= |
Eε + |
H ε( |
− ε |
г.у |
), где ε |
г.у |
– |
относительная |
|
г m |
г г.у |
г |
гm |
|
|
|
радиальная деформация стенок гильзы при переходе из упругой
в пластическую зону нагружения; |
ε гm |
– |
|
|
максимальная относитель- |
|||||||||||||||||||||
ная радиальная деформация стенок гильзы, |
ε гm = |
∆ rг m |
, |
то уравне- |
||||||||||||||||||||||
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rг |
|
|
|
|
ние разгрузки примет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
σ |
г |
= |
Eε + ε |
г. |
у |
(E− |
|
H −) ε |
гm |
(E− |
H |
г |
). |
|
|
|
(1.33) |
|||||||
|
|
|
|
|
г г |
|
г |
|
|
г |
|
г |
|
|
|
|
|
|
|
|||||||
Приравнивая выражения (1.29) и (1.33), получим: |
|
|
|
|
||||||||||||||||||||||
|
r |
|
|
− p ) = |
E ε |
|
|
+ ε |
|
(E − |
|
|
)− |
∆ rг m |
(E − |
|
|
|
|
|||||||
|
г |
( p |
дн |
г |
г.у |
H |
г |
|
|
H |
г |
). |
||||||||||||||
|
|
|
|
|||||||||||||||||||||||
|
hг |
|
к |
г |
|
|
г |
|
|
|
|
rг |
|
|
г |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В момент действия максимальной нагрузки последнее выражение можно преобразовать для расчета максимальных радиальных деформаций в стенках гильзы:
|
|
|
|
∆ r = |
c |
|
( p |
− |
p |
|
)− |
ε г.у rг |
(E − |
H |
|
), |
(1.34) |
|
|
|
H |
к m |
|
г |
|||||||||||
|
|
|
|
г m |
|
|
дн m |
|
|
|
г |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Hг |
|
|
|
|
|
где |
cH – |
коэффициент податливости гильзы в зоне пластичности, |
|||||||||||||||
|
= |
r 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cH |
г |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hгHг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контактное давление при максимальной нагрузке можно найти, используя связь между начальным зазором и значениями максимальных деформаций гильзы и ствола:
∆ r = ∆ |
+ ∆ |
r |
. |
г m |
н |
к m |
|
Подставляем в эту формулу выражения (1.30) и (1.34), получим
c |
|
( p |
|
− p |
|
) − |
ε г.у rг |
|
(E |
− H |
|
) |
= ∆ + |
с p |
. |
|||||||
H |
дн m |
|
|
|
г |
|||||||||||||||||
|
|
|
|
к m |
|
|
Hг |
|
г |
|
|
|
|
н |
к кm |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
p |
дн m |
− ∆ − |
|
ε г.у rг |
(E |
− |
H |
г |
) |
|
|
|
||||
|
|
|
|
H |
|
|
|
|
||||||||||||||
Отсюда pк m = |
|
|
|
н |
|
Hг |
|
|
г |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
(1.35) |
|||||
|
|
|
|
|
|
cH |
+ ск |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
38

Уравнение разгрузочной прямой (1.32) для момента экстракции имеет вид
|
|
|
|
|
|
|
|
|
σ |
г |
= |
Eε |
+ σ |
|
− |
εE |
, |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
г |
г.э |
|
г m |
|
г гm |
|
|
|
|
|
|||
где ε г.э |
– |
относительная радиальная деформация стенок гильзы в |
|||||||||||||||||||||||
момент экстракции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Подставляя в это уравнение выражения для σ г |
и ε гm , получим: |
|||||||||||||||||||||||
|
|
|
|
|
r |
|
|
|
− p |
|
) = E |
∆ r |
+ σ |
|
− |
|
∆ |
rг m |
|
||||||
|
|
|
|
|
г |
( p |
дн. э |
|
|
г.э |
|
E |
|
|
|
, |
|||||||||
|
|
|
|
|
h |
|
|
r |
|
r |
|
||||||||||||||
|
|
|
|
|
|
|
|
к. э |
|
г |
|
|
г m |
г |
|
|
|||||||||
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
г |
|
|
|
где σ |
г m |
= |
rг |
( p |
− |
|
p |
|
). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
дн m |
|
кm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
hг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Радиальная деформация гильзы в момент экстракции |
||||||||||||||||||||||||
|
|
|
|
|
∆ |
r = |
c |
Е |
( p |
|
− |
p |
|
)− |
σ г m rг+ ∆ |
r |
, |
|
(1.36) |
||||||
|
|
|
|
|
|
г.э |
|
|
|
|
дн. э |
к.э |
|
|
Ег |
|
|
г m |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где cЕ – коэффициент податливости гильзы в зоне упругости.
Далее найдем контактное давление в момент экстракции гильзы в том же порядке, в каком находили контактное давление при максимальной нагрузке:
|
|
|
|
∆ r = ∆ |
+ ∆ |
r |
, |
|
||
|
|
|
|
г.э |
н |
к.э |
|
|
||
c |
|
( p |
− p |
) − |
σ г m rг |
+ ∆ r = ∆ + с p |
, |
|||
E |
|
|||||||||
|
дн.э |
к.э |
|
Eг |
|
|
г m |
н к к.э |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
Е |
p |
дн.э |
− ∆ − |
σ г m rг+ ∆ |
r |
|
pк.э = |
|
|
н |
Е |
г m |
|||
|
|
|
|
|
г |
|
. |
|
|
|
|
|
cЕ |
+ ск |
|
||
|
|
|
|
|
|
|
||
При полном падении нагрузки
|
∆ r − ∆ |
− |
σ г m rг |
|
|
Е |
|
||||
pк.э = |
г m |
н |
|
||
|
|
г |
. |
(1.37) |
|
|
|
|
|||
|
cЕ + ск |
|
|||
39
Свободная экстракция гильзы обеспечивается отсутствием сил сопротивления от трения со стороны камеры, что соответствует наличию конечного зазора (∆к > 0). При этом полученное в (1.37) значение должно быть отрицательным (pк.э < 0). В противном случае после снятия нагрузки между гильзой и стенками камеры остается радиальный натяг и возникает усилие осевого сопротивления движению гильзы
|
h |
|
|
|
Fг = 2π rг+ |
г |
pк.э f (lг− |
xг ), |
(1.38) |
|
||||
|
2 |
|
|
|
где lг – длина основного конуса гильзы; xг – текущее осевое смещение гильзы.
Выражения (1.31)–(1.38) определяют порядок расчета функционирования гильзы в случае ее радиальных деформаций как в упругой, так и в пластической зонах. Однако расчет значительно упростится, если пластические деформации отсутствуют, для чего необходимо провести предварительную проверку возможного режима полного нагружения гильзытолько в пределах зоныупругости.
В этом случае необходимо определить контактное давление при максимальной нагрузке, принимая в формуле (1.35) Eг = Hг :
p |
= |
cH pдн m − ∆ н |
. |
|
|||
кm |
|
cH + ск |
|
|
|
||
Затем нужно проверить возможность работы гильзы в этом режиме, т.е. выполнение условия
∆ н+ ск pкm≤ ε г.у rг. |
(1.39) |
1.4.2. Расчет осевых деформаций гильзы
При расчете осевых деформаций гильзы (рис. 1.16) допускаем, что контактное давление между гильзой и камерой мало отличается от давления в канале ствола (pк = pдн). Тогда растягивающая осевая сила в стенке гильзы
P |
= p |
|
π dг2 |
− p |
|
f π |
d |
x |
дн 4 |
|
|||||||
p |
|
|
дн |
|
г |
|
||
40