

Учебные пособия / Эдельштейн лекции по ТММ учебник
.pdfмеханизма угла установки стабилизатора самолета и заменяющая пару четвертого класса Е кинематическая цепь, состоящая из звена 8 и кинематических пар O3 и O4 (эта цепь показана пунктиром)
Во всяком механизме, при остановке его ведущего звена (звеньев), ведомая кинематическая цепь теряет свою подвижность и обращается в ферму. Степень ее подвижности
 (3)
(3)
где ωB —степень подвижности ведомой цепи механизма; пВ — число звеньев этой цепи;
p5В — число кинематических пар в ней же.
Вформуле (3) нет числа кинематических пар четвертого класса, так как предполагается, что они заменены способом, указанным раньше. Из этой формулы получаем
 (4)
(4)
Откуда следует вывод: ведомая кинематическая цепь образуется четным числом звеньев и количеством кинематических пар пятого класса, кратным трем.
Рассмотрим, какие кинематические цепи можно образовать, удовлетворяющие условию (4). Наименьшее положительное и целое четное число равно двум, поэтому (при пВ = 2) p5В = 3. На
рис. 18 показана такая цепь. Эта
цепь называется группой Ассура (структурной группой) второго класса. В ней различают внешние кинематические пары В и D и внутреннюю — С. Посредством этой группы механизм образуется следующим образом. Элементами своих внешних кинематических пар В и D группа присоединяется к системе определенного движения, в нашем случае (рис. 19)— к ведущему звену 1 и стойке 4.
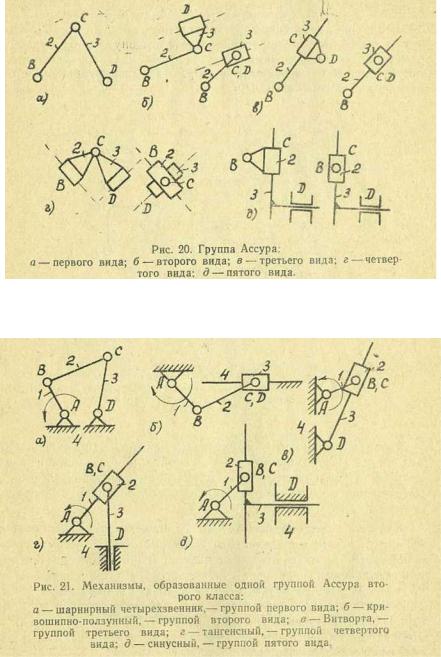
Группа второго класса может быть выполнена в пяти видах (рис. 20).
На рис. 21 приведены примеры механизмов, образованные группами второго класса различных видов. Ведущее звено 1 обозначено круговой стрелкой, а стойке присвоен номер 4.
Четырехзвенный четырехшарнирный механизм изображен на рис. 21.
Если в формуле (4) положить пВ = 4, то р5 В = 6. Кинематические цепи, удовлетворяющие этому условию, даны на рис. 22. Класс группы выше второго определяется числом внутренних кинематических пар основного замкнутого контура. Для группы третьего класса (рис. 22, б) это будут пары Е, F, G, а для группы четвертого класса (рис.. 22. в)— пары D, Е, Ft G.
Установим порядок структурного синтеза (проектирования) механизма. К ведущему звену и стойке присоединяется группа Ассура любого класса, а к полученному механизму (системе определенного движения) можно присоединить следующую группу и т. д.
Как видим, механизмы получаются последовательным присоединением к системе
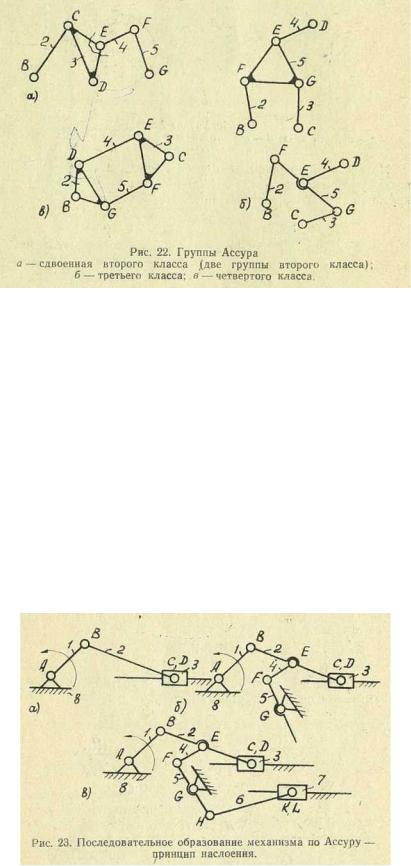
определенного движения особых кинематических цепей, носящих название групп Ассура. В этом заключается принцип наслоения. Само собой разумеется, что, задаваясь числом пВ = 6 и р5в = 9, получим либо строенную группу второго класса, либо усложненные группы третьего и четвертого классов, либо группу пятого класса. Обычно механизмы образуются группами второго класса, реже третьего, еще реже четвертого и, как исключение, пятого и более старших классов Рассмотрим пример образования механизма двигателя дизель. К ведущему звену 1 и стойке 8
(рис. 23, а) присоединяется группа второго класса, второго вида, состоящая из звеньев 2 и 3 и кинематических пар В, С и D, далее к группе BCD и. стойке (рис. 23,.6) присоединяется группа второго класса, первого вида — звенья 4 и 5, кинематические пары Е, F, G, и, наконец, к звену 5 и стойке 8 (рис. 23, в) присоединяется группа второго класса, второго вида — звенья 6 и 7, пары
H, К, L.
Порядок образования механизма может быть записан формулой строения
 (5)
(5)
где I — ведущее звено, 2 — номер класса группы, а числа в индексах — номера звеньев, образовавших ведущую систему и соответствующие группы.
Очевидно, что для определения класса механизма надо разделять его на группы в порядке, обратном его образованию. Это разделение надо вести так, чтобы после удаления очередной группы в остатке была бы система определенного движения, т. е. остаток был бы тоже механизмом.
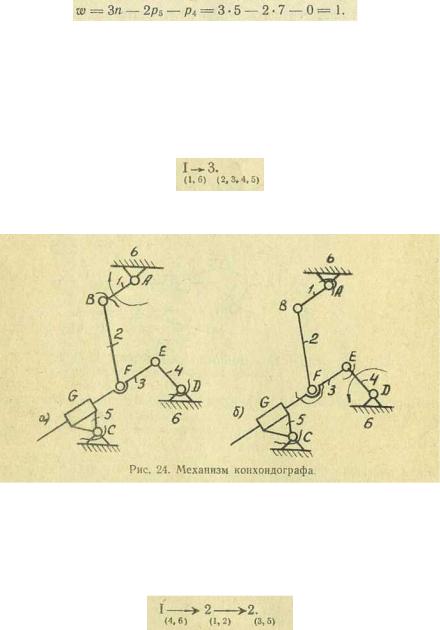
Пример. Дан механизм конхоидографа (рис. 24, а), требуется определить его степень подвижности ω и указать его класс.
Решение. Число всех звеньев k = 6, подвижных п = 5, кинематических пар пятого класса 7, пар четвертого класса нет.
Степень подвижности
Ведущее звено номер один, оно указано круговой стрелкой.
Разделяем механизм на группы Ассура. Пытаемся отделить группу второго класса. Это нам не удается, так как отделение любых двух звеньев, соединенных между собой кинематической парой, приводит к разрушению механизма. Приходится отсоединять четыре звена (т. е. группу более старшего класса), это будет вся ведомая кинематическая цепь, состоящая из звеньев 2, 3, 4 и 5 и пар В, F, Е, G, D и С. В этой группе пары Е, F, G будут внутренними, следовательно, мы отделили группу третьего класса. Больше отделять нечего: остались только ведущее звено 1 и стойка 8. Формула строения
Наивысший класс отделенной группы — третий, следовательно, механизм надо отнести к третьему классу.
На рис. 24, б в том же механизме за ведущее звено принято четвертое. Теперь можно от механизма отделить группу второго класса, не разрушая остатка, отделяется группа, образованная первым и вторым звеном и парами А, В и F — это группа второго класса первого вида. Далее отделяется группа, состоящая из третьего и пятого звеньев и пар Е, G, С — группа второго класса третьего вида.
Формула строения
Наивысший класс группы — второй, следовательно, механизм конхоидографа при ведущем звене 4 будет второго класса.
Из разобранного примера видно, что класс механизма не только определяется наивысшим классом присоединенной группы, но еще и зависит от того, какое звено принято за ведущее.
В заключение надо указать, что если в механизме будут кинематические пары четвертого класса, то прежде чём приступить к разделению его на группы Ассура, следует все эти пары заменить (каждую из них) одним звеном и двумя парами пятого класса.
В основном механизме нельзя ведущим звеном назначать звено, входящее в кинематическую
пару четвертого класса со стойкой.
ЛЕКЦИЯ ТРЕТЬЯ
Т е м а II. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
§ 4. Цели анализа и необходимые сведения из кинематики плоского движения
1°. Кинематический анализ механизмов сводится к решению трех задач.
Задача о положениях, которая позволяет судить о том, какие положения занимают звенья механизма при том или ином положении ведущего звена. Посредством этой задачи, например, можно установить рабочий ход инструмента (строгальный станок), положение рабочего органа в холостом и рабочем положениях (шасси самолета — убранное и выпущенное), траекторию рабочего органа (подъемный кран, экскаватор) и т. д.
Задача о скоростях устанавливает зависимость скоростей ведомых точек механизма от скорости ведущего звена. Особенно важно установить отношение этих скоростей. Знание скорости и хода рабочего органа позволяет, например, находить время срабатывания механизма (время выпуска самолетного шасси, время срабатывания фотозатвора), определять отношение скоростей (передаточного отношения), что помогает правильно подбирать редукторы для машинных агрегатов. Кроме того, в нашем курсе передаточное отношение определяет характер передачи усилия от одной части механизма к другой и позволяет отыскивать приведенную массу механизма.
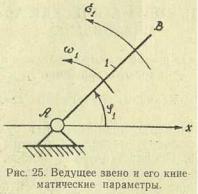
Задача об ускорениях непосредственно связана с нахождением инерционной нагрузки, которая в современных машинах может достигать значительной величины. Как это будет видно из последующего изложения, ускорения отдельных точек звеньев механизма зависят от квадрата угловой скорости ведущего звена, а эта скорость в некоторых объектах достигает десятков тысяч оборотов в минуту (в некоторых случаях даже сотен тысяч оборотов). Поскольку в механизмах движение ведомых звеньев определяется движением ведущего звена, то полезно указать, в какой форме это движение задается. Если ведущее звено входит в кинематическую пару со стойкой (рис. 25), то движение его можно задать различно: зависимостью его угловой координаты φ1 от времени t
 (6) изменением его угловой скорости ω1 от времени t
(6) изменением его угловой скорости ω1 от времени t
 (7) или изменением его углового ускорения ε1 от времени t
(7) или изменением его углового ускорения ε1 от времени t
 (8)
(8)
При задании движения зависимостью (6) остальные (7 и 8) можно получить последовательным дифференцированием ее по времени. При задании зависимостями (7) или (8) остальные получаются соответствующими математическими операциями (дифференцированием или интегрированием).
Обычно считают, что ведущее звено вращается равномерно. Почему удобно задаваться так, будет видно из последующего изложения.
Из теоретической механики известно, что положение плоской фигуры вполне определяется
положением двух ее точек. Поэтому задачи кинематического анализа будем считать решенными, если для каждого звена механизма будут известны: координаты, скорости и ускорения двух его точек. Эти же задачи тоже будут решенными, если для каждого звена механизма известны: координаты, скорость и ускорение одной его точки и угловая координата, угловая скорость и угловое ускорение самого звена.
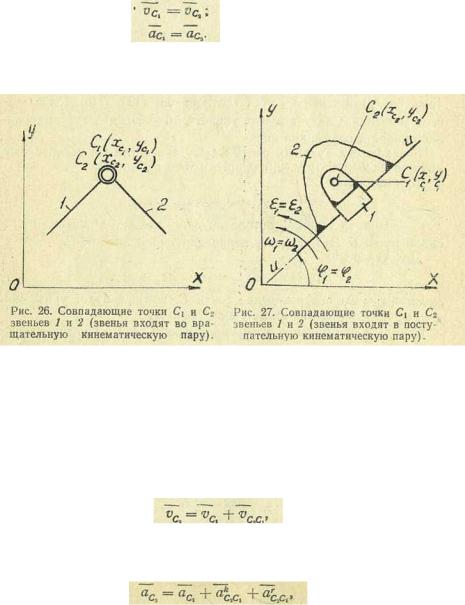
2°. Прежде чем приступить к рассмотрению методов кинематического анализа, установим связь между кинематикой двух точек, принадлежащих разным звеньям и вошедших в одну и ту же кинематическую пару.
Звенья 1 и 2 (рис. 26) вошли во вращательную кинематическую пару. Центр цапфы С1 звена 1 движется как одно целое вместе е центром втулки С2 звена 2. Поэтому координаты этих точек равны между собою:
 (9) скорости и ускорения для них тоже одинаковы:
(9) скорости и ускорения для них тоже одинаковы:
(10)
(11)
Для этого случая не будем указывать, какому звену принадлежит точка С, а просто для центра любого шарнира его координаты, скорость и ускорение будут записываться так:
хС, уС, vС, аС.
Звенья 1 и 2 вошли в поступательную кинематическую пару (рис. 27). На плоскости, принадлежащей звену 1, отмечена точка C1, под ней, на плоскости звена 2, находится точка С2 (точки С1 и С2— совмещенные точки). Угловые координаты, скорости и ускорения звеньев 1 и 2 будут одинаковыми:
 (12) Координаты точек C1 и С2 также равны между собою:
(12) Координаты точек C1 и С2 также равны между собою:
 (13) Между скоростями этих точек имеется такое соотношение:
(13) Между скоростями этих точек имеется такое соотношение:
|
|
(14) |
υС2С1 — относительная скорость точки С2 относительно точки С1, ее |
||
направление параллельно линии ии. |
|
|
Ускорения точек С2 и С1 связаны равенством: |
|
|
|
|
(15) |
|
k |
|
k |
|
|
где aC 2 C 1— ускорение Кориолиса в движении точки С2 |
относительно точки С1, по модулю aC2 C 1 |
|
== 2 ω1υС2С1, а направление его можно определить, повернув вектор относительной |
||
υ |
|
|
скорости С 2 |
С 1на 90° по направлению вращения звена 1; |
|
|
|
|
r |
относительное (релятивное) |
точки С2 относительно точки С1 оно |
aC 2 C 1 —ускорение |
||
направлено параллельно линии ии.
Звенья 1 и 2 вошли в кинематическую пару четвертого класса (рис. 28). Для точек С2 и С1
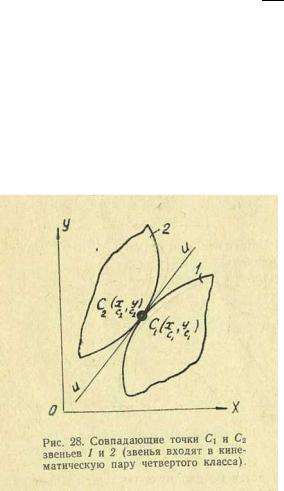
соотношения (13) — (15) сохраняют свои значения. Следует только указать, что ускорение ar
C 2 C 1
направлено параллельно линии ии.
В заключение укажем связь между скоростями и ускорениями двух точек В и С (рис. 29) одного и того же звена.
Для скоростей
 (16)
(16)
υ — скорость точки С, которая будет у нее при вращении звена около точки В. Эта скорость
CB
перпендикулярна линии ВС. Для ускорений
 (17)
(17)
здесь a — полное ускорение точки С, которое будет у нее при вращении звена около точки B;
CB
anCB — нормальное ускорение точки С при вращении звена около точки В, оно направлено
υ2
параллельно линии ВС от точки С к точке В и по модулю an = CB ;
CB lCB
atCB — касательное ускорение точки С при вращении звена
около точки В, оно направлено перпендикулярно линии ВС, по модулю atCB = εllCB.
Теперь рассмотрим методы кинематического анализа механизмов. Этих методов два: аналитический (численный) и графический.
§ 5. Аналитический метод кинематического анализа механизма
1°. Все задачи кинематического анализа будут решены, если составлена функция положения для ведомой точки или ведомого звена механизма.
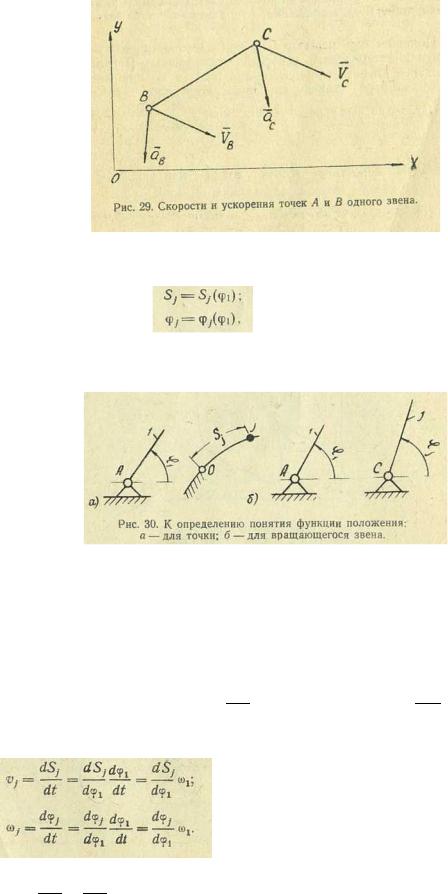
Функцией положения называется зависимость координаты ведомой точки j (рис. 30, а) или ведомого звена j (рис. 30,6) от координаты ведущего звена 1 (рис. 30):
(18)
(19)
где Sj— координата ведомой точки j; φ1— координата, ведущего звена 1 φj —координата ведомого звена j.
Если ведущее звено входит в поступательную кинематическую пару со стойкой, то в выражения (18) и (19) следует вставить его линейную координату.
Вид функции положения зависит от схемы механизма, а постоянные, входящие в ее выражение, от размерных параметров механизма.
2°. Покажем, как решаются задачи о скоростях и ускорениях, если функция положения известна (составлена). Предположим, что ведущее звено вошло во вращательную кинематическую пару со стойкой. Закон движения его задан зависимостью
φ1 = φ1 (t), тогда его угловая скорость ω1 = |
dφφ1 |
, а угловое ускорение ε1 = |
dφω1 . |
|
dφt |
|
dφt |
Линейную скорость υj ведомой точки j или угловую скорость ωj ведомого звена j находят следующим образом:
(20)
|
|
|
|
(21) |
Выражение |
dφS j |
и |
dφφ j |
называются аналогами скорости или передаточными отношениями. |
dφφ1 |
dφφ1 |
Обозначаем их так:
аналог линейной скорости: dφS j |
или S̍Sjφ1 или (υj)φ1 или ij1; |
|
|
dφφ1 |
|
аналог угловой скорости: |
dφφ j |
или φ̍ или (ωj)φ1 или ij1 |
dφφ1 |
||
|
|
jφ1 |
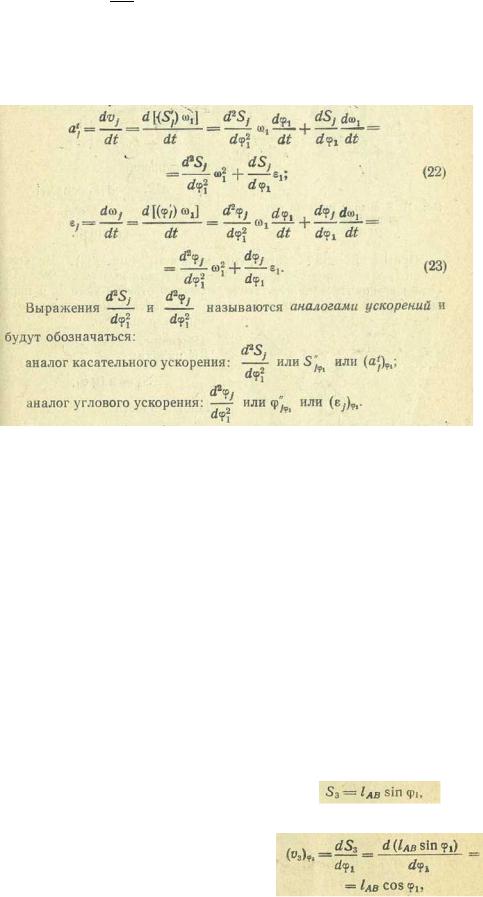
Линейное касательное ускорение, atj ведомой точки εlj или угловое ускорение е. ведомого звена j
определяют из выражений:
Из формул (20) — (23) видно, что характер изменения скорости и ускорения ведомой точки или ведомого звена механизма зависит от вида функции положения (18) или (19). Численные значения этих параметров определяются конкретными значениями скорости и ускорения ведущего звена.
Из сказанного следует такой порядок аналитического решения задач кинематического анализа механизма.
1.Составляется функция положения.
2.Дифференцированием функции положения находится аналог скорости.
3.Дифференцированием аналога скорости определяется аналог ускорения.
Решим ряд примеров на составление функции положения, попутно найдем выражения для аналогов скорости и ускорения.
Пример 1. Дан синусный механизм (рис. 31). Ведущее звено 1-АВ, его длина lAB —
известна, φ1 — координата этого звена, ох— ось отсчета угла φ1 и перемещения S3 ведомого звена 3.
Требуется составить функцию положения для звена 3.
Решение. Из треугольника АВК сразу получаем
аналог скорости
аналог ускорения