

Строительные и дорожные машины. Основы автоматизации
.pdf211
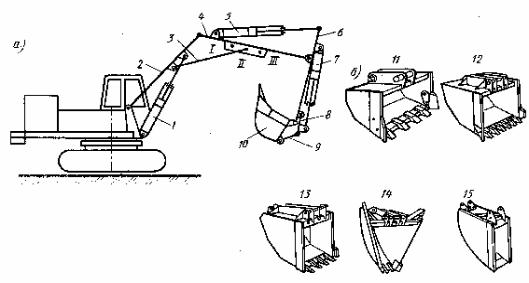
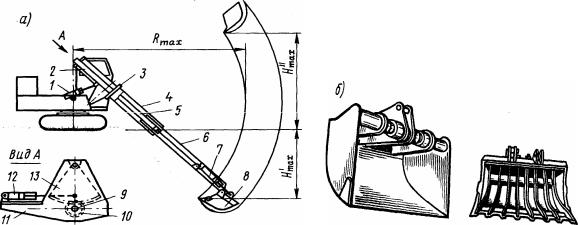
К ним относятся: максимальный радиус Rmax и максимальная высота Hmax копания, максимальный Rmax и минимальный Rmin радиусы копания на уровне стоянки экскаватора, максимальные радиус Rразгр max и высота Hразгр max разгрузки. Радиусы отсчитывают от оси вращения экскаватора, а высоты – от уровня его стоянки. Максимальной высотой копания оценивают, в частности, предельную высоту забоя, который способен разрабатывать экскаватор, а максимальной высотой разгрузки – предельную высоту транспортных средств, которые могут работать в комплекте с экскаватором.
Обратная лопата. Одноковшовые экскаваторы с рабочим оборудованием обратной лопаты предназначены для отрывки грунта ниже уровня стоянки (разработка котлованов, траншей). Выпускаемые отечественной промышленностью обратные лопаты ограничены вместимостью ковша 1,4 м3 для канатных машин и 2 м3 — для гидравлических. Создаются мощные карьерные гидравлические обратные лопаты.
Рабочее оборудование обратной лопаты включает стрелу, рукоять и ковш. Рукоять 5 (рис. 4.16) канатного экскаватора соединена со стрелой 9 шарниром на конце последней, а ковш 6 укреплен на конце рукояти. Кроме основных зубьев, установленных на козырьке ковша, последний оборудуют также подрезными боковыми зубьями. При разработке траншей эти зубья подрезают боковые стенки, предупреждая заклинивание ковша. Применяют также ковши с полукруглыми днищами и режущей кромкой вместо зубьев. Рабочие движения ковша обеспечиваются изменением длин тягового 7 и подъемного 4 полиспастов. Последний образован канатом и блоками, установленными на конце рукояти и головной части дополнительной стойки 3, служащей для отклонения подъемных канатов от стрелы. Нижним концом дополнительная стойка шарнирно закреплена на поворотной платформе в ее передней части, а верхним подвешена канатами к двуногой стойке. Подъемный канат навивают на барабан 1 подъемной лебедки, а тяговый, через блок 8 на стреле,— на барабан 2 тяговой лебедки. После отрывки пионерной выемки, в которую можно опустить ковш, последний устанавливают в исходную позицию на дно выемки (положение 1) Подтягивая далее тяговый канат и опуская подъемный, перемещают ковш кверху, разрабатывая грунт зубьями или режущими кромками и заполняя им ковш (положение 11).
По достижении ковшом верхнего обреза выемки при заторможенном тяговом барабане подъемным полиспастом поднимают рабочее оборудование над выемкой (положение 111). В таком его положении поворачивают платформу на разгрузку. В зависимости от требований, предъявляемых к размерам полосы разгрузки, в конце поворотного движения или несколько раньше отпусканием тягового каната и выбором подъемного выбрасывают рукоять с ковшом вперед (положение IV) и, опрокидывая ковш, разгружают его. Возвратный поворот совмещают с опусканием рабочего оборудования путем отпускания подъемного полиспаста (положение 1). Сложени-
,
212
ем поворотных движений стрелы и рукояти режущие кромки ковша или его зубья могут занять любое положение в границах контура АВСD, которым определяются основные рабочие размеры: Rмах, Rmin, Hmax, Нразгр мах.. При переоборудовании универсального экскаватора с прямой лопаты на обратную кроме установки соответствующего рабочего оборудования переоборудуют также напорный механизм в тяговый. Стрелоподъемную лебедку используют для установки в требуемое положение дополнительной стойки.
У гидравлических экскаваторов второй – четвертой размерных групп обратная лопата является основным видом рабочего оборудования. Ее стрелу чаще всего выполняют из двух секций – коренной 2 (рис. 4.17, а) и удлиняющей 4 – соединенных между собой шарниром и тягой 3. Последнюю можно устанавливать на удлиняющей секции в отверстия I, II и III, изменяя тем самым длину стрелы (расстояние между шарнирами крепления коренной секции к поворотной платформе и рукояти 6 к удлиняющей секции). Соединение рукояти со стрелой и ковша 10 с рукоятью – шарнирное. Для управления поворотом стрелы, рукояти и ковша используют гидравлические цилиндры I, 5 и 7. При этом последний управляет поворотом ковша через коромысло 8 и тягу 9. Такая схема обеспечивает ковшу большие угловые перемещения. На некоторых экскаваторах применяют моноблочную стрелу Г-образной формы. В зависимости от прочности разрабатываемых обратной лопатой грунтов и видов выполняемых работ ее оборудуют ковшами 11...15 (рис. 4.17, б) различной вместимости и формы. В частности, ковши для дренажных работ 14 и для рытья узких траншей 15 выполняют в размерах и форме профиля разрабатываемой выемки.
Рис.4.17. Гидравлическая обратная лопата: а)- общий вид экскаватора; б)- форма ковша; 1,5, 7− гидроцилиндры; 2,4 – коренная и удлиненная стрела; 3− тяга; 6− рукоять; 8− коромысло; 9− тяга; 10− ковш; 11,12, 13, 14, 15 – разновидности ковшей
Рабочий процесс гидравлической обратной лопаты аналогичен описанному выше для канатных экскаваторов. Различие заключается в способе передачи движения ковшу, которое у гидравлических экскаваторов обеспечивается гидравлическими цилиндрами 1, 5 и 7. Характер движения
,
213
ковша зависит от конкретных условий выполнения работ и в значительной мере определяется опытом машиниста. Чаще всего движения стрелы используют для установки ковша в исходное положение, а также для его перевода в транспортное положение.
Для копания используют в основном движение рукояти, а в конце этой операции работают ковшом, обеспечивая его заполнение. Движения рукояти, а затем и ковша используют также для разгрузки последнего. Благодаря возможности относительного движения ковша он приобретает высокую маневренность, что обеспечивает полное заполнение его грунтом, удержание в нем грунта во время транспортной операции без потерь, направленную разгрузку, в том числе в транспортные средства, что затруднено в случае канатных обратных лопат.
Важнейшим преимуществом гидравлических обратных лопат перед канатными является их способность реализовать на зубьях или режущей кромке ковша большие усилия благодаря жесткому сочленению элементов рабочего оборудования между собой и с базовой частью машины, работающей в отношении устойчивости как единое целое. У канатных экскаваторов эти усилия ограничены силой тяжести только рабочего оборудования, прижимающей его к забою. Попытка увеличить усилия на зубьях ковша приводит к подъему рабочего оборудования – его повороту относительно шарнира у пяты стрелы в направлении от забоя. Это позволяет при прочих равных условиях навешивать на гидравлические экскаваторы ковши большей вместимости – в среднем на 60 % по сравнению с ковшами канатных экскаваторов.
Следствием этого является повышенная в таком же отношении производительность обратных лопат. Вместе с тем это приводит к более тяжелым условиям нагружения ходовых устройств, в частности, гусеничных, унифицированных на некоторых моделях с канатными машинами. В последнее время в конструкциях ряда моделей полноповоротных гидравлических экскаваторов применяют гусеничные ходовые устройства тракторного типа со звеньями из проката, обладающие высокой надежностью и большим ресурсом по сравнению с экскаваторными гусеничными устройствами. Этим достигается унификация с сельскохозяйственными и дорожными машинами, сокращаются затраты на техническое обслуживание.
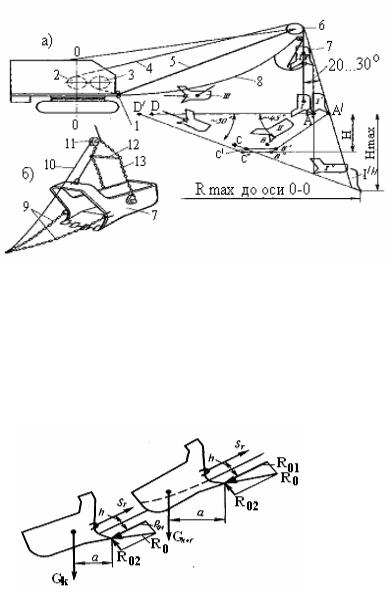
Драглайн. Экскаваторы с рабочим оборудованием драглайна применяют для разработки грунтов преимущественно ниже уровня стоянки. Благодаря удлиненной по сравнению с другими видами рабочего оборудования стреле драглайны работают на большем радиусе копания, поэтому их используют преимущественно на отрывке больших котлованов и траншей, а также для погрузки и разгрузки сыпучих строительных материалов. Как отмечалось ранее, мощные шагающие драглайны используют для добычи полезных ископаемых открытым способом и на вскрышных работах. Отечественной промышленностью выпускаются строительные драглайны с ковшами 0,3...3 м3, а шагающие драглайны — от 5,45 до 100 м3. Рабочее оборудование драглайна включает стрелу 5 (рис. 4.18, а) обычно решетча-
,

214
той (строительные экскаваторы), реже вантовой (шагающие драглайны) конструкции, по длине значительно превышающую стрелу лопаты, ковш 7, тяговый 8 и подъемный 4 канаты. Последний огибает головной блок 6 и навивается на барабан 2 подъемной лебедки. Тяговый канат направляется роликовым устройством 1 и навивается на барабан 3 тяговой лебедки.
Ковш подвешивают к тяговому канату цепями 9 (рис. 4.16, б), а к подъемному канату — цепями 13. Чтобы подъемные цепи не препятствовали свободному перемещению ковша при разгрузке, между ними ставят распорку 12. На ковше устанавливают также разгрузочный канат 10, закрепляя его одним концом на арке ковша, а вторым — в узле соединения тяговых цепей с тяговым канатом. С подъемными цепями разгрузочный канат соединяется через блок 77, установленный в узле соединения подъемных цепей с подъемным канатом. Для начала разработки ковш опускают на грунт (положения 1, 1', 1"', 1"– рис. 4.18, а), затем тяговым канатом при
ослабленном подъемном канате его перемещают по забою (положение II ). После заполнения ковша, не ослабляя тягового каната, подъемным канатом
его подтягивают к стреле (положение III ), включают поворотный механизм с одновременным перемещением ковша к голове стрелы подъемным и тяговым канатами. В конце этой операции тяговый канат отпускают, ковш опрокидывается и разгружается (положение IV). Далее возвратным поворотным движением с одновременным отпусканием подъемного и тягового канатов опускают ковш в исходное положение. За счет центробежных сил, возникающих при повороте, подъемный канат отклоняется от вертикали на угол до 20...30 °, благодаря чему достигается больший радиус заброса ковша в исходное положение (положения 1/, 1///). Предельная форма продольного сечения пионерной выемки АВСО показана на рис. 4.15, а, а с учетом центробежных сил при возвратном поворотном движе-
нии – А'В'С'0.
Углы наклона к горизонту заходного и выходного откосов составляют в среднем 45 и 30 ° соответственно, а длина горизонтального участка – не менее длины ковша. После отработки пионерной выемки экскаватор перемещают от забоя на новую стоянку, с которой может быть разработана выемка с предельным контуром А'В"С'D" и т. д., до получения требуемой глубины Н. Предельное значение этого размера Нтах, а также радиуса копания R мах ограничивается длиной стрелы и углом выходного откоса.
Управление экскаватором сводится к включению и отключению подъемной и тяговой лебедок, а также механизма поворота. При ослабленном тяговом канате ковш свободно висит на подъемном канате, а при натяжении тягового каната он восстанавливает рабочее положение посредством разгрузочного каната. Драглайны работают преимущественно с разгрузкой в отвал. Разгрузка грунта в транспортные средства возможна, но она резко снижает производительность экскаватора из-за необходимости выполнять эту операцию после полной остановки поворотного движения и пониженных скоростей последнего во избежание раскачки ковша. В отличие от
,
215
прямой и обратной лопат, у которых ковш имеет жесткое соединение с рукоятью, у драглайнов ковши подвешивают к стреле на канатах.
Рис.4.18. Драглайн: а) – рабочее положение; б) − крепление ковша; 1−ролик; 2, 3− барабаны; 4,8− подъемный и тяговый канаты; 5− стрела; 6− головной блок; 7− ковш; 9, 13− цепи; 10− разгрузочный канат; 11− блок; 12− распорка
При этом в режиме копания ковш перемещается под действием тягового усилия 5 т (рис. 4.19), преодолевая сопротивление грунта копанию Ro и частично силу тяжести ковша с грунтом Gк+г (при работе на наклонных участках).
Рис. 4.19. Схема силового взаимодействия ковша драглайна с грунтом
В начале копания порожним ковшом момент силы его тяжести Gka оказывается недостаточным, чтобы противостоять моменту тягового усилия SТ h относительно режущих кромок зубьев, вследствие чего происходит незначительное опрокидывание ковша вперед с врезанием его в грунт. По мере заполнения ковша грунтом возрастает сила Gк+г и плечо этой силы а относительно режущих кромок, вследствие чего движение ковша относительно дневной поверхности земли стабилизируется. Дальнейшее увеличение силы Gк+г и перемещение центра масс ковша в направлении к задней стенке приводят к выглублению ковша. Устойчивая работа ковша драглайна возможна при определенных соотношениях размеров a и f . В случае недостаточной высоты установки петель тягового каната путь врезания ковша в грунт увеличивается, а при большой высоте может произойти его опрокидывание. Процесс можно стабилизировать изменением раз-
,
216
мера h. С этой целью петли тяговых канатов делают переставными, устанавливая их в верхнее положение при работе в легких грунтах и в нижнее
– при работе в плотных грунтах, соответственно увеличивая или уменьшая толщину среза. При этом, естественно, будет изменяться и путь наполнения ковша, который при работе в легких грунтах кратен двум — четырем длинам ковша и увеличивается с повышением прочности грунта. Для работы в легких грунтах применяют ковши увеличенной (в 1,3...1,5 раза) вместимости без зубьев или с двумя зубьями с полукруглым днищем и режущей кромкой.
При переоборудовании строительного универсального экскаватора с прямой лопаты на драглайн заменяют его рабочее оборудование, устанавливают направляющее роликовое устройство у пяты стрелы и подобно переоборудованию в обратную лопату − напорный механизм переоборудуют в тяговый.
Мощные шагающие драглайны отличаются от описанных большими размерами, индивидуальным приводом рабочих механизмов и ходовым устройством. На этих экскаваторах устанавливают электродвигатели постоянного тока, питаемые от сети переменного тока высокого напряжения через сетевой двигатель переменного тока и генераторы постоянного тока. Шагающие ходовые устройства обеспечивают перемещение экскаватора только в направлении задней части поворотной платформы. Поэтому маневровые движения осуществляются с поворотом платформы в нужном направлении.
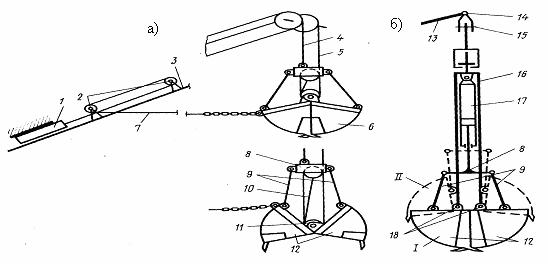
Грейфер. Грейферное рабочее оборудование используют для отрывки глубоких котлованов, очистки водоемов и каналов, а также для погрузки и разгрузки сыпучих материалов. В грейферном рабочем оборудовании с канатным управлением (рис. 4.20, а) используются стрела драглайна 3 и челюстной ковш 6, подвешенный на поддерживающем 4 и замыкающем 5 канатах. Для предотвращения закручивания канатов при поворотных движениях и раскачивания ковша применяют оттяжной канат 7, огибающий блоки 2 на стреле и заканчивающийся подвешенным к нему грузом 1, свободно перемещающимся в направляющих стрелы. Ковш состоит из двух челюстей 12, шарнирно соединенных с нижней головкой 11. Тягами 9 челюсти подвешены к верхней головке 8. Поддерживающий полиспаст 4 закрепляется на верхней головке, а замыкающий образует полиспаст 10, обоймы которого закреплены соответственно на верхней и нижней головках. При работе грейферный ковш может быть подвешен на поддерживающем или на замыкающем канатах. В первом случае нижняя головка вместе с нижней обоймой полиспаста опускается, и челюсти раскрываются.
Во втором случае из-за возникающих в полиспасте усилий его головки сближаются, и челюсти закрываются. Для работы грейфером его ковш опускают на поддерживающем канате на грунт в раскрытом положении, ослабляют поддерживающий канат, а замыкающим канатом поднимают ковш.
,
217
В первой стадии этого движения челюсти ковша сближаются, захватывая грунт, а затем загруженный грунтом ковш поднимается из выемки. В таком его положении экскаватор поворачивают на разгрузку, а в конце этого движения переключают подвеску канатов, удерживая ковш поддерживающим канатом, в результате чего челюсти раскрываются, и грунт высыпается из ковша. Возвратным поворотным движением и опусканием ковша на поддерживающем канате его устанавливают в исходную позицию следующего рабочего цикла. В гидравлическом варианте (рис. 4.18, б) рабочее оборудование грейфера подвешивают к рукояти обратной лопаты 13 на двух цилиндрических шарнирах 14 и 15, позволяющих ковшу занять отвесное положение.
Для гашения инерционных сил при раскачивании ковша во время поворота платформы на пальцах этих шарниров устанавливают фрикционные диски. Относительно вертикальной оси ковш грейфера может быть поворотным или неповоротным. Поворотный ковш обладает лучшей маневренностью при копании и на погрузочно-разгрузочных работах.
Поворотная часть состоит из полой штанги 16, связанной шарнирами 18 с челюстями ковша. Внутри штанги помещается гидроцилиндр 77, соединенный с ней корпусом, а штоком – с траверсой 8. Последняя шарнирно соединена с челюстями ковша тягами 9.
Рис. 4.20. Конструктивная схема грейферного рабочего оборудования: а) – с канатным управлением; б) −в гидравлическом варианте;1− груз; 2− блок; 3− стрела драглайна; 4, 5,7,13− поддерживающий, замыкающийи, оттяжной и подвесной канаты; 6− челюстный ковш; 8, 11− верхняя и нижняя головки; 9− тяги; 10− полиспаст; 12− челюсти; 14,15,18 – цилиндрические шарниры; 16− штанга; 17−гидроцилиндр
Выдвинутый шток гидроцилиндра соответствует закрытому положению ковша 1, а вдвинутый — открытому положению 11. Для работы на больших глубинах штангу удлиняют вставками. Усилия, которые могут быть реализованы на челюстях канатного грейфера при захвате ими грунта, определяются разностью силы тяжести ковша и усилия натяжения замыкающего каната, т. е. на разработку грунта реализуется только часть силы тяжести ковша. Кроме того, удовлетворяющая требованиям производства
,
218
грейферных работ загрузка ковша обеспечивается при низких скоростях сближения челюстей при действующих на грунт нагрузках, близких по значению к статическим. С увеличением этих скоростей ковш отрывается от грунта, не успев заполниться. Эти факторы существенно снижают производительность машины, которая составляет примерно половину производительности драглайна, смонтированного на той же экскаваторной базе. У гидравлических грейферов для внедрения челюстей ковша в грунт используют напорное усилие гидроцилиндра, что позволяет разрабатывать более прочные грунты без ограничения скорости сближения челюстей. По сравнению с канатными грейферами это позволяет сократить рабочий цикл более чем на 30 %, что при прочих равных условиях в таком же отношении снижает материалоемкость этого рабочего оборудования.
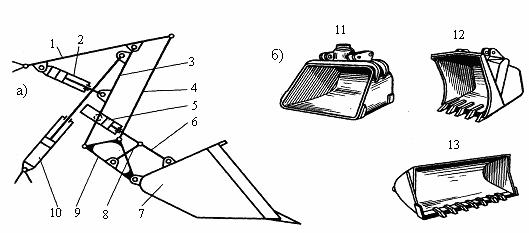
Погрузчики. Гидравлические экскаваторы эффективно применяют для погрузки дробленых и сыпучих материалов. При загрузке ковша последний перемещают по подошве осыпающегося откоса, работая на малых вылетах. По условиям устойчивости машины и наилучшего использования энергетических параметров ее силовой установки на этих работах можно применять ковши повышенной вместимости (в 1,5...2 раза больше вместимости ковшей прямых лопат). В соответствии с характером работы изменяется и схема рабочего оборудования (рис. 4.21, а), называемого погрузчиком., используя это движение для заполнения ковша по подошве забоя.
Рис. 4.21. Рабочее оборудование гидравлического погрузчика (а) и его смены ковши ;(б): 1− стрела; 2,5, 10 – гидроцилиндры; 3−рукоять; 4,6, 8− тяги; 7− ковш; 9− подвеска; 11, − ковш без зубьев; 12, 13− ковши с зубьями
Для этого обычно используют коренную секцию стрелы обратной лопаты 1, связанную с подвеской 9 ковша 7 посредством рукояти 3 и тяги 4. Рукоять, тяга, стрела и подвеска образуют шарнирный четырехзвенник (параллелограмм). Ковш соединен с подвеской шарнирно и может перемещаться относительно нее в вертикальной плоскости. Рабочие движения обеспечиваются четырьмя гидроцилиндрами: стреловым 10, шарнирно соединенным корпусом с поворотной платформой; двумя гидроцилиндрами 2 для поворота рукояти и гидроцилиндром поворота ковша 5; корпусом, шарнирно соединенным с рукоятью, а штоком через рычаг 8 и тягу 6— с
,
219
ковшом. При фиксированном положении штока гидроцилиндра ковша относительно его корпуса поворотом рукояти посредством гидроцилиндра 2 обеспечивают перемещение ковша параллельно опорной поверхности экскаватора.
В конце этой операции, а при необходимости и в процессе ее выполнения гидроцилиндром 5 ковш поворачивают зубьями вверх, а посредством гидроцилиндров 10 и 2 рабочее оборудование поднимают и выносят вперед. Эти движения начинают до поворота машины на разгрузку и заканчивают непосредственно перед разгрузкой. Разгружают ковш его поворотом зубьями вниз с помощью гидроцилиндра 5. Возвращают ковш в исходное положение теми же движениями в обратном порядке. Для выполнения погрузочных работ машину оборудуют широким ковшом 11 без зубьев. Погрузчики применяют также для разработки грунтов. В этом случае их оборудуют ковшами с зубьями 12 и 13.
Экскаватор-планировщик. Применение описанных выше видов рабочего оборудования, изготовленного на базе шарнирно-рычажных схем гидравлических экскаваторов, для планировочных работ требует четкой координации нескольких простых движений, из которых может быть составлено прямолинейное движение режущей кромки ковша. Исключением является рабочее оборудование погрузчика, но с ограниченным перемещением в направлении планируемой поверхности. Более просто эта задача решается в конструкции экскаватора-планировщика с телескопическим рабочим оборудованием, которое состоит из рамы стрелы 2 (рис. 4.22, а), двух секций стрелы – неподвижной 4 и подвижной 6 и ковша 8. Раму укрепляют шарнирно на поворотной платформе, а для ее перемещения в вертикальной плоскости используют гидроцилиндр подъема стрелы 1. Неподвижную секцию стрелы монтируют на раме, обеспечивая ей возможность поворота относительно продольной оси последней. С этой целью ее опирают на бандаж 3 и через ось 9 — на заднюю стенку рамы 11. На рис. 4.22, а (вид А) показан один из вариантов конструктивного решения поворотного механизма, выполненного из гидроцилиндра 12 и зубчатой пары, состоящей из зубчатого сектора 13 и шестерни 10. Последняя жестко закреплена на оси 9, а зубчатый сектор подвешен в верхней части задней стенки рамы. Приводной гидроцилиндр закреплен шарнирно корпусом на кронштейне задней стенки, а штоком — на зубчатом секторе. Поворотные относительно продольной оси движения неподвижной секции стрелы обеспечиваются соответствующими поступательными движениями штока гидроцилиндра. Выдвижная секция стрелы 6 может перемещаться относительно неподвижной секции 4 с помощью гидроцилиндра 5, размещенного внутри стрелы. Ковш закреплен шарнирно на конце подвижной секции. Он может поворачиваться относительно этого шарнира посредством гидроцилиндра 7. Положение ковша в пространстве определяется совокупностью следующих движений: его поворотного перемещения относительно стрелы, выдвижения подвижной секции стрелы и поворота неподвижной секции относительно собственной продольной оси, а также поворота платформы. Для
,
220
планировки и зачистки поверхностей ниже уровня стоянки экскаватора используют продольные перемещения стрелы и при необходимости – частичные поворотные движения ковша.
Рис.4.22. Экскаватор-планировщик с телескопическим рабочим оборудованием (а) и рабочие органы (б): 1, 5,7, 12− гидроцилиндры; 2− рама; 3− бандаж; 4,6− неподвижная подвижная секции; 8− ковш; 9− ось; 10− шестерня;
11− задняя стенка рамы; 13− зубчатая пара
Для зачистки и планировки горизонтальных и слегка наклонных поверхностей к этим движениям добавляются подъем и опускание стрелы, а для зачистки боковых стенок траншей и котлованов — еще и поворот стрелы относительно ее продольной оси. Частично последние движения используют также для зачистки и планировки горизонтальных и наклонных поверхностей. После заполнения ковша грунтом во избежание его просыпания при последующей транспортной операции ковш подворачивают к стреле, стрелу поднимают из забоя, поворачивают платформу в сторону разгрузки и поворотом ковша зубьями или режущей кромкой вниз разгружают его. Возвращают ковш в исходное положение теми же движениями в обратном порядке.
Для планировочных и зачистных работ применяют широкие ковши (рис. 4.22, б), обычно без зубьев. Экскаваторы-планировщики используют также для выполнения обычных экскавационных и погрузочноразгрузочных работ. Основными рабочими размерами экскаваторапланировщика являются максимальный радиус копания Ктах (см. рис. 4.22, а), максимальные глубина НмахI и высота НмахII копания, а также максимальная высота разгрузки.
Неполноповоротные гидравлические экскаваторы на базе пневмоко-
лесных тракторов. Для выполнения небольших рассредоточенных объемов земляных работ в условиях частого перебазирования с объекта на объект применяют гидравлические экскаваторы, построенные как навесное оборудование на серийно выпускаемые пневмоколесные тракторы. Кроме основных рабочих органов, которыми являются ковши прямых и обратных лопат, эти экскаваторы комплектуют сменным рабочим оборудованием
,