

книги / Системы управления исполнительными механизмами
..pdf–пренебрегаем реакцией якоря;
–пренебрегаем влиянием вихревых токов (для машин малой мощности это допущение является общепринятым).
Для определения ММ СПЭ требуется найти зависимость еп =
=(Uув). Запишем соотношения для приращений координат, предполагая, что СУИМ работает в «малом»:
еп = Сег г Фг;Фг = Kфг wвг iвг,
где wвг iвг = Fг, Сег г = const, Kфг г гн const; Сег – кон-
Fг Fгн
структивная постоянная; wвг – число витков обмотки возбуждения генератора.
Коэффициент Kфг линеаризует кривую насыщения магнитной цепи генератора.
Математическая модель процессов в цепи возбуждения генератора аналогична ММ цепи возбуждения электродвигателя и представляет собой апериодическое звено первого порядка:
W |
Р |
iвг Р |
|
1 Rвг |
, |
eвг Р |
|
||||
вг |
|
|
TвгP 1 |
||
|
|
|
|||
где Rвг, Tвг – эквивалентные параметры цепи возбуждения генератора.
С учетом приведенных соотношений ММ генератора может быть представлена в виде передаточной функции:
W |
Р |
eп Р |
|
Kг |
|
, |
|
|
|
||||
г |
Uув Р |
|
TвгP |
1 |
|
|
|
|
|
||||
где Kг – коэффициент передачи генератора,
Kг KтвСег гwвгKфг ,
Rвг
где Kтв – коэффициент передачи тиристорного возбудителя.
121
Для генераторов средней и большой мощности влияние вихревых токов отразится на увеличении Твг на величину постоянной времени вихревых токов. Иногда их модель представляют в виде апериодического звена второго порядка [17, 18].
Тиристорные преобразователи. Тиристорные преобразователи
(ТП) применяются в качестве источников регулируемого напряжения для питания якорной цепи или цепи возбуждения коллекторных электродвигателей постоянного тока (ДПТ) ИМ. Для управления асинхронным двигателем (АДКР) тиристорный преобразователь применяется в качестве управляемого выпрямителя для регулирования напряжения в цепи постоянного тока частотного преобразователя со звеном постоянного тока. На рис. 4.15 приведена обобщенная функциональная схема тиристорного преобразователя.
Тиристорный преобразователь (ТП) как элемент системы управления должен быть описан в статике и динамике.
Статическая модель. Статическая характеристика представляет собой регулировочную характеристику еп = (Uу).
Разобьем ТП на два основных модуля – систему импульснофазового управления (СИФУ) и силовую часть (см. рис. 4.15).
|
|
~380 В |
Uу |
|
eп |
|
Силовая часть |
|
СИФУ |
|
|
|
ТП |
Рис. 4.15. Упрощенная функциональная схема тиристорного преобразователя
ММ силовой части. Схемотехника силовой части представляет собой один или два комплекта управляемых вентилей, включенных по нулевой или мостовой схеме (встречно-параллельной или перекрестной).
122

Опишем статическую зависимость еп = ( ). Для зоны непрерывного тока
eп еd 0 cos ,
еd 0 KсхЕ2ф,
где ed0 – максимальное средневыпрямленное (среднее) значение ЭДС преобразователя; Е2ф – вторичная фaзная ЭДС силового трансформатора; Kсх – коэффициент схемы силового комплекта вентилей, Kсх = 2,34 – для мостовой схемы, Kсх = 1,17 – для нулевой схемы.
Для зоны прерывистых токов
е Е |
d 0 |
2cos 2 m sin 2 |
, |
|
|||
п |
|
|
|
|
|
|
где – интервал проводимости тока; m – пульсность выпрямленного напряжения преобразователя ( < /m).
Заметим, что в зоне непрерывного тока = m.
ММ СИФУ. Статическая зависимость = (Uу) при наиболее распространенном вертикальном способе управления СИФУ определяется видом опорного напряжения СИФУ.
При пилообразном (линейном) опорном напряжении искомая статическая зависимость будет иметь вид
|
|
|
Uу |
|
|
2 |
1 |
|
. |
||
|
|||||
|
|
|
Uопм |
||
Следует заметить, что реальный диапазон изменения угла отпирания тиристоров, как правило, не превышает 5 –175 . Минимальный (5 ) угол отпирания определяется максимальной ЭДС тиристорного преобразователя, а ограничение максимального угла (175 ) предохраняет реверсивный тиристорный преобразователь от «прорыва» инвертора. Кроме того, важен правильный выбор начального угла отпирания тиристоров нач, зависящего от способа управления комплектами тиристоров реверсивного преобразовате-
123

ля и параметров активно-индуктивной нагрузки преобразователя. В любом случае этот угол равен полусумме углов отпирания тиристоров обоих комплектов вентилей, т.е.
нач 1 2 ,
2
где 1, 2 – углы отпирания тиристоров выпрямительной и инверторной групп вентилей. Как правило, начальный угол отпирания тиристоров нач находится в диапазоне 90°–125°, причем нач = 90° выбирается только при совместном согласованном управлении комплектами вентилей.
При гармоническом (косинусоидальном) опорном напряжении
статическая характеристика преобразователя будет характеризоваться зависимостью
|
Uу |
|
|
arccos |
|
|
, |
|
|||
Uоп м |
|
||
где Uоп м – максимальное значение опорного напряжения СИФУ. Результирующие статические зависимости еп = (Uу) можно
получить, например, графоаналитическим способом [17, 18]. Они характеризуются аналитическими зависимостями:
|
Uy |
Uопм |
|
, еп KтпUу, |
|
еп Еd 0 sin |
2 |
|
|||
|
|
|
|
|
|
где Kтп – коэффициент передачи тиристорного преобразователя, определяемый выражением Kтп = Еd0/Uоп м. В современных СПЭ статические зависимости еп = (Uу) методами технической линеаризации удается свести к линейным зависимостям.
Динамическая модель. Модель ТП в динамике с учетом его временных или частотных свойств выбирается в зависимости от характера решаемой задачи.
Для целей синтеза САУ на практике применяют три модели: 1. В виде безынерционного звена:
W(p) = Ed(P)/Uу(P) = Ed0/Uоп м = Kтп. |
(4.19) |
124

2. В виде инерционного звена первого порядка (апериодического звена):
W P |
Kтп |
. |
(4.20) |
|
ТтпР 1 |
||||
|
|
|
Постоянная времени Tтп тиристорного преобразователя определяется выражением
Ттп 2mf1 c Tф СИФУ,
где m – пульсность преобразователя (m = 3 для нулевых, m = 6 для мостовых схем выпрямителей); первое слагаемое – среднестатистическое запаздывание преобразователя; fc – частота питающей сети (50 Гц для отечественных преобразователей); Tф СИФУ – постоянная времени фильтра на входе СИФУ. Для большинства тиристорных преобразователей величина Tтп находится в диапазоне 1–10 мc.
3. В виде звена чистого запаздывания:
W p Kтпе ТтпР. |
(4.21) |
Эти модели применимы как для целей синтеза, так и для целей анализа САУ. Для целей анализа могут применяться более сложные модели, учитывающие влияние дискретного характера работы преобразователя, неполную управляемость тиристоров, а также аспекты, связанные с характером нагрузки ТП.
Более подробно с аспектами описания тиристорных преобразователей как объектов управления в различных системах управления ЭИМ (автоматизированными электроприводами постоянного тока) можно ознакомиться в источниках [17, 18, 20, 23].
Транзисторные и симисторные преобразователи. Транзи-
сторные преобразователи (ТрП) применяются в качестве источ-
ников регулируемого напряжения для питания якорной цепи и цепи возбуждения коллекторных электродвигателей постоянного тока (ДПТ), управляемых выпрямителей и инверторов для управ-
125
ления асинхронными двигателями с короткозамкнутым ротором (АДКР) и синхронными двигателями с постоянными магнитами (СДПМ), бесколлекторными двигателями постоянного тока (БДПТ) и др. Самое широкое распространение транзисторные преобразователи получили после создания мощных силовых IGBTтранзисторов и силовых сборок на их основе, интеллектуальных драйверов контроля состояния и управления. На сегодняшний день серьезной альтернативы применению СПЭ иного типа как для приводов постоянного, так и для приводов переменного тока по совокупности критериев, включая широко применяемый критерий «качество-надежность/цена», нет.
Благодаря полной управляемости, высокому быстродействию, хорошей интеграции в микропроцессорные системы управления транзисторные преобразователи получили заслуженную популярность. В большинстве СУИМ на основе электроприводов постоянного (широтно-импульсные и релейные) и переменного тока (с автономными инверторами напряжения и тока) СПЭ на транзисторах, как очень быстродействующие, представляют безынерционной моделью
W |
р |
Y p |
K |
|
, |
(4.22) |
X p |
|
|||||
ТрП |
|
|
ТрП |
|
|
где X(p), Y(p) – соответственно входная и выходная координаты преобразователя.
Симисторные преобразователи (СП) применяются для бес-
контактного управления ЭИМ постоянной скорости или фазового управления ЭИМ переменной скорости. Иногда вместо симисторов применяют схемотехнический аналог – встречно-параллельно включенные тиристоры. Для ЭИМ постоянной скорости модель СП аналогична модели (4.22). Для ЭИМ переменной скорости модели СП аналогичны моделям ТП (4.19)–(4.21).
Отечественной промышленностью выпускаются реверсивные симисторные пускатели серий БКР, ПБР, БУЭР и др. Среди тиристорных реверсивных пускателей наиболее распространены пуска-
126
тели серии ФЦ. Основное достоинство СП – коммутация вентилей в моменты времени, соответствующие переходу фазы питающего напряжения через ноль, что обеспечивает необходимые требования электромагнитной совместимости СУИМ с остальным электрооборудованием систем управления.
4.4. Датчики координат СУИМ
Основными координатами СУИМ в составе технологических установок являются: скорость вращения или линейная скорость Vлин перемещения рабочего органа, угловое положение вала или линейное перемещение Sлин рабочего органа, вращающий момент М на валу или перестановочное усилие F рабочего органа ИМ, давление P и расход Q жидкостей или газов, температура T0 объекта управления и др.
Быстродействие современных датчиков первичной информации, устройств преобразования, приема-передачи информации о координатах состояния ИМ достаточно высоко по сравнению с быстродействием технологических координат, на которые воздействуют ИМ.
В связи с этим ММ датчиков координат СУИМ обычно представляются в виде безынерционных звеньев, входом которых являются измеряемые координаты, а выходами – напряжения (0–10 В), токи (0–20 мА, 4–20 мА) или значения цифрового кода. Например:
Kдс – коэффициент передачи датчика скорости РО, Kдс = Uдс/ω; Kдп – коэффициент передачи датчика положения РО, Kдс =
= Uдс/φ;
Kдт – коэффициент передачи датчика тока (якоря, статора
и т.п.), Kдт = Uдт/i.
Коэффициенты передачи датчиков рассчитывают для номинальных значений входных и выходных координат.
При необходимости фильтрации (сглаживания пульсаций измеряемых сигналов) ММ датчиков координат СУИМ представляют в виде инерционных моделей первого или более высокого порядка. Например, тахогенератор постоянного тока обладает обо-
127
ротными пульсациями вследствие неравномерности магнитного зазора, коллекторными, зубцовыми и полюсными пульсациями. В силу этого при синтезе САР скорости тахогенератор, как правило, рассматривают в виде апериодического звена первого порядка:
W |
p |
Uтг p |
|
Kтг |
, |
p |
|
||||
тг |
|
|
Tтг p 1 |
||
|
|
|
|||
где Kтг – коэффициент передачи тахогенератора, Kтг = Uтг н/ωн; Ттг – постоянная времени фильтра тахогенератора.
Координаты технологической среды (давления, расхода, температуры и др.) измеряются датчиками, имеющими определенную инерцию, а иногда и чистое запаздывание. В последнем случае их модель представляют в виде инерционного звена с запаздыванием. Например, термопара в капсуле, применяемая для измерения температуры в топке парового котла, может быть представлена передаточной функцией
W |
p |
Uдт p |
|
Kдт |
е р, |
|
|
||||
дт |
|
Т0 p |
Tдт p 1 |
||
|
|
||||
где T0 – измеряемая температура, °С; Uдт – напряжение термопары, мВ; Kдт – коэффициент передачи датчика температуры, Kдт = = Uдт н/Tн0; Tдт, τ – соответственно постоянные времени инерции и чистого запаздывания.
Параметры датчиков приводятся, как правило, в паспортных данных, но иногда их приходится определять экспериментально.
4.5. Регуляторы и корректирующие звенья
Регуляторы и корректирующие звенья составляют основу устройства управления исполнительными механизмами и призваны скорректировать статические и динамические свойства СУИМ
всоответствии с требованиями к качеству управления.
Вкачестве регуляторов систем автоматизации и управления применяются электронные регуляторы на аналоговой и цифровой
128
элементной базе, пневматические, гидравлические и комбиниро-
ванные. Большинство регуляторов являются регуляторами непря-
мого действия, лишь в редких случаях – прямого действия (рабо-
тают без притока энергии извне).
Независимо от технологического назначения регуляторов (регуляторов скорости, положения рабочего органа, давления, уровня, температуры и т.д.) все они подразделяются на два больших класса
[16, 21]:
–параметрические регуляторы класса «вход-выход» (П-, ПИ-,
ПИД- и другие регуляторы, где буквами П, И, Д обозначены соответственно пропорциональный, интегральный и дифференциальный компоненты управления – параметры регуляторов);
–регуляторы состояния (апериодические, модальные и т.п.).
Вотличие от регуляторов первого класса они контролируют состояние всей системы либо ее некоторой части, т.е. имеют обратные связи по полному либо усеченному вектору состояния системы.
В зависимости от применяемой аппаратной базы регуляторы могут быть аналоговыми (на операционных усилителях), цифро-
выми (на микропроцессорах), релейными или релейно-импульсными
(на контактных и бесконтактных реле, логических интегральных схемах и микропроцессорах).
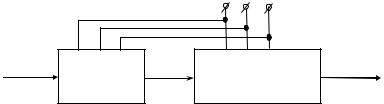
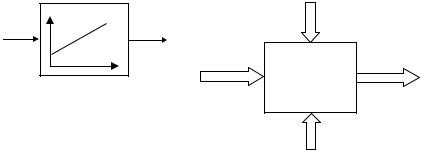
Регулятор класса «вход-выход» на функциональных схемах СУИМ обозначается в виде переходной функции, которую имеет данный регулятор, например в виде, приведенном на рис. 4.16, а.
Обозначения на схеме:
Хвх – входной сигнал, сигнал ошибки регулирования той или иной координаты СУИМ;
Yвых – выходной сигнал регулятора.
Регуляторы состояния (рис. 4.16, б) в отличие от регуляторов класса «вход-выход» имеют как минимум одно входное задающее воздействие и обратную связь по вектору состояния. Такие регуляторы состояния являются скалярными. В общем случае они являются векторными, имеют несколько задающих воздействий и могут иметь входные воздействия, компенсирующие внешние возмущения.
129
Хвх |
Yвых |
F |
|
|
|
||
|
Хз |
Модальный |
Yвых |
|
|
регулятор |
|
|
ПИ-регулятор |
состояния |
|
|
|
X |
|
|
а |
б |
|
Рис. 4.16. Функциональные схемы регуляторов СУИМ
Обозначения на схеме:
Xз – вектор задающих воздействий, Xз = хз1 хз2 ... хзk T;
X – вектор (полныйилиусеченный) состояния; X = х1 х2 ... хn T; Yвых – вектор выходных воздействий регулятора; Yвых =
= у1 у2 ... уm T;
F – вектор возмущающих воздействий; F = f1 f2 ... fd T.
При k = m = 1 векторный регулятор состояния преобразуется в скалярный регулятор.
Регуляторы состояния в СУИМ применяются крайне редко. Как правило, современные СУИМ оснащены ПИ-, ПИДили ПДДрегуляторами (аналоговыми, цифровыми или релейно-импульс- ными).
Рассмотрим наиболее часто применяемые в СУИМ параметрически оптимизируемые аналоговые регуляторы класса «вход-выход».
Их можно представить в виде усилительного звена – операционного усилителя (рис. 4.17).
Обозначения на схеме:
A1 – операционный усилитель;
Zвх, Z0 – значения комплексного сопротивления во входной цепи и в цепи обратной связи операционного усилителя.
130