

книги / Системы управления исполнительными механизмами
..pdfWмс Р 2T c RэKд2  Tм T c Р 1 .
Tм T c Р 1 .
Введем обозначения:
Kзкрс 1 Kc ; Kмс 2Т сRэKд2
Kc ; Kмс 2Т сRэKд2  Тм ;
Тм ;
А Р 2Т сР 2Т сР 1 1; B Р 2Т сР 1.
Тогда получим
W |
Р |
Kзкрс |
, W |
Р |
KмсВ Р |
. |
A P |
|
|||||
зкрс |
|
мс |
|
A P |
||
Если ЗКРС настроен на СО, т.е. применен ПИ-регулятор скорости, и на его входе установлен фильтр с постоянной времени 4T c, то его передаточная функция имеет вид
Wзкрс Р |
|
1 Kc |
|
. |
|
|
|||
|
4T c P 2T c P T c P 1 1 |
1 |
||
Передаточная функция Wмс(P) может быть получена аналогично предыдущему случаю из рассмотрения структурной схемы ЗКРС, приведенной на рис. 7.3, в которой
Wрс Р |
|
4T c Р 1 |
|
|
. |
||
8T 2 |
R K |
K |
Р K |
K |
|
||
|
c |
э д |
с |
т |
|
м |
|
Полагая Uзс = 0 и принимая во внимание, что Mc = ic / Kд, получим
W |
Р |
|
8T 2c RэKд2 Р Tм T c Р 1 |
. |
|||||||
|
|
||||||||||
мс |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
4T c Р 2T c Р T c Р 1 |
1 |
||||||
Введем обозначения: |
|
|
|
|
|
|
|
||||
|
K |
зкрc |
1/K |
; K |
мс |
2T R K 2 |
/T ; |
|
|
||
|
|
|
с |
|
μc |
э д |
м |
|
|
||
A(P) 4Tμc P[2Tμc P (Tμc P 1) 1] 1; |
B(P) 4Tμc P(Tμc P 1), |
||||||||||
221
позволяющие получить те же обобщенные выражения для Wзкрс(P)
и Wмс(P):
|
W |
|
|
Р |
Kзкрс |
, W |
Р |
KмсВ Р |
. |
|
|
|
|
||||||||||||
|
|
|
A P |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
зкрс |
|
|
|
|
мс |
|
|
|
|
A P |
|
|
|
|
||||||||
С учетом |
обозначений структурной |
схемы |
(см. рис. 8.6) |
||||||||||||||||||||||
и введенных обозначений можно записать |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Р |
K |
|
|
K |
зкрс |
W Р K |
Р |
K |
|
K |
мс |
В Р |
М |
|
Р . |
||||||||||
P |
|
А Р |
|
P |
|
|
А Р |
|
|
||||||||||||||||
|
|
|
|
рп |
п |
|
|
|
|
|
|
|
|
с |
|
||||||||||
Поскольку (P) |
|
= з(P) |
– (P), предыдущее выражение |
||||||||||||||||||||||
можно переписать относительно ошибки (P): |
|
|
|
|
|
|
|||||||||||||||||||
|
Р |
|
|
|
А Р |
|
|
|
|
|
|
з Р |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
А Р Р K KзкрсKрпKп |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
K Kмс |
В Р |
|
|
Мс Р , |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
А Р Р K KзкрсKрпKп |
|
|
|
|
|
|
|
|
|
|
||||||||||
где з – задание перемещения с постоянной скоростью («постоянная заводка»), з = з.
Пусть ЗКРС настроен на ТО. Для квазиустановившегося режима (P = 0) получим величину установившейся ошибки следящей САУ:
уст |
1 |
з |
Kмс |
Мс. |
(8.3) |
K KзкрсKрпKп |
|
||||
|
|
KзкрсKрпKп |
|
||
Данное выражение позволяет рассчитать добротность следящей системы по скорости в соответствии с выражениями (5.2):
D |
з |
|
з |
K |
|
K |
зкрс |
K |
рп |
K |
. |
|
|
||||||||||
|
уст |
|
уст |
|
|
|
п |
|
|||
|
|
|
|
|
|
|
|
|
|
222
Подставляя в данное выражение значение Kрп, рассчитанное по выражению (8.1) для системы, настроенной на АО, и значение Kзкрс = 1/ Kс, получим
D 1 4T п.
4T п.
Выражения (5.3) и (8.3) позволяют рассчитать добротность следящей системы по моменту статической нагрузки на валу электропривода:
D |
М |
с |
|
KзкрсKрпKп |
1 4T |
K |
|
K |
|
. |
|
|
Kмс |
|
|
||||||
мс |
уст |
п |
|
|
|
мс |
|
|||
Таким образом, для снижения уст, а следовательно, для увеличения добротности следящей СУИМ необходимо увеличивать быстродействие замкнутого контура регулирования положения (ЗКРП) за счет повышения быстродействия внутренних контуров регулирования тока и скорости. Это предполагает применение малоинерционных силовых и информационных преобразователей, а также реализацию оптимальных по быстродействию алгоритмов управления. Величина добротности системы по моменту определяется не только быстродействием ЗКРП, но и величиной K Kмс.
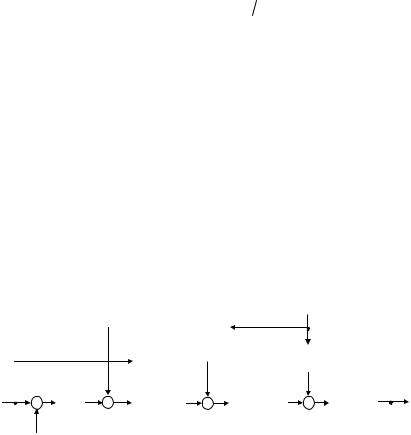
Эффективным средством повышения точности следящих систем управления является применение комбинированного управления, обеспечивающего инвариантность (квазиинвариантность) СУИМ по отношению к задающим и возмущающим воздействиям. Структурная схема такой системы приведена на рис. 8.7.
|
|
|
|
|
|
|
|
Wк2(P) |
|
|
Mc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uк2 |
|
Wк1(P) |
|
Uк1 |
|
|
Wмс(P) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
_ |
|
|
|
|
||||
з |
+ |
+ |
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Kп |
|
|
Wрп(P) |
|
|
Wзкрс(P) |
|
K /P |
|
|
|||
_ |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.7. Структурная схема инвариантной следящей СУИМ
223
В структуру следящей системы управления введено два звена компенсации влияния задающего и возмущающего воздействий (Wк1(P) и Wк2(P)). Инвариантность системы к изменению задающего воздействия обеспечивает звено Wк1(P), инвариантность к изменению возмущающего воздействия – звено Wк2(P).
Для нахождения передаточных функций этих звеньев воспользуемся принципом суперпозиции. Сначала будем полагать, что Mс = 0. Тогда можно записать
(P) = (K / P)Wзкрс(P)[Uрп(P) + Uк1(P)] =
= (K / P)Wзкрс(P)[Wрп(P)Kп (P) + Wк1(P) з(P)].
Полагая, что в инвариантной СУИМ (P) = 0, (P) = з(P), получим
з(P) = (K / P)Wзкрс(P)[Wк1(P) з(P)].
Отсюда Wк1(P) = P / K Wзкрс(P).
Для нахождения Wк2(P) будем полагать з(P) = 0. Тогда можно записать
(P) = (K / P)[–Wмс(P)Mс(P) + Wк2(P) Wрп(P) Wзкрс(P) Mс(P)] = 0.
Отсюда Wк2(P) = Wмс(P) / Wрп(P) Wзкрс(P).
Заметим, что для обеспечения полной инвариантности следящей системы по отношению к задающим и возмущающим воздействиям требуется формирование «чистых» производных этих воздействий. Если ЗКРС имеет достаточно высокое быстродействие и может быть представлен апериодическим звеном первого поряд-
ка в виде Wзкрс(P) = (1 / Kc) / (TcP + 1), то для обеспечения полной инвариантности и, соответственно, астатизма бесконечно высоко-
го порядка по задающему воздействию необходимо ввести первую
ивторую производные от задающего воздействия.
Вдействительности ММ ЗКРС может существенно отличаться от принятой модели в силу целого ряда факторов: температурного и временного дрейфа параметров якорной цепи двигателя, наличия дискретности и неполной управляемости тиристорного
224
преобразователя, неидеальности и упругости кинематической передачи электропривода и т.д. Кроме того, как уже отмечалось, имеет место проблема формирования сигналов производных произвольно меняющегося задающего воздействия.
Проблема обеспечения полной инвариантности СУИМ к возмущающим воздействиям усугубляется сложностью получения достаточно точной оценки самого возмущения – сигнала, пропорционального статической нагрузке на валу двигателя. Все это приводит к тому, что на практике, как правило, ограничиваются введением в закон управления лишь первых производных задающего и возмущающего воздействий, а следовательно, полученные передаточные функции Wк1(P) и Wк2(P) аппроксимируют пропорцио- нально-дифференциальными (ПД) звеньями.
Следящая СУИМ с комбинированным управлением, содержащая такие звенья, позволяет практически достичь астатизма первого порядка по задающему и возмущающему воздействиям (скоростная и моментная ошибки отсутствуют). При этом система приобретает качества, подобные введению интегратора в структуру регулятора положения. Важно отметить, что введение компенсирующих звеньев не изменяет характеристического уравнения системы, замкнутой по положению, а следовательно, не оказывает влияния на устойчивость следящей системы. Система комбинированного управления с упрощенной структурой компенсирующих звеньев обеспечивает частичную инвариантность по отношению к задающим и возмущающим воздействиям и носит название квазиинвариантной по отношению к этим воздействиям.
225
9. ДИСКРЕТНО-НЕПРЕРЫВНЫЕ СУИМ
Электромеханические объекты управления, как отмечалось в главах 3 и 4, представляют, как правило, линейными или нелинейными непрерывными моделями. Вместе с тем само устройство управления может быть как непрерывным (аналоговым), так и дискретным. Дискретный характер управления позволяет реализовать ряд преимуществ, недостижимых для непрерывных СУИМ. Это возможность реализации алгоритмов управления практически любой сложности, реализации максимального быстродействия или точности, возможность перенастройки и автонастройки устройства управления, возможность самодиагностики, управления по промышленной сети и др.
К дискретно-непрерывным СУИМ относятся релейные (ре- лейно-импульсные) и цифровые СУИМ. Первые применяются
преимущественно |
для |
управления ЭИМ постоянной |
скорости |
|
(см. подразд. 5.2), |
вторые |
– ЭИМ переменной |
скорости |
|
(см. главу 6). Вместе |
с тем |
микропроцессорные контроллеры, |
||
а следовательно, цифровые средства автоматизации применяются
ив тех, и других СУИМ, реализуя разные алгоритмы управления.
9.1.Дискретизация сигналов и Z-преобразование
Вдискретных и дискретно-непрерывных системах в отличие от непрерывных имеется хотя бы одна координата состояния или управления, имеющая дискретный характер.
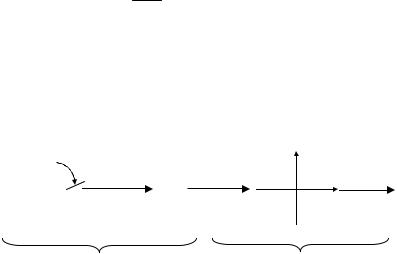
Достаточным условием дискретности систем управления является разрывная статическая характеристика. На рис. 9.1 приведена типоваяфункциональнаясхема дискретно-непрерывной СУИМ.
Обозначения на рис. 9.1: ДЭ – дискретный элемент; НЧ – непрерывная часть;
x(t) – входной непрерывный сигнал;
226

e(t) – непрерывный сигнал ошибки; u*(t) – дискретный сигнал;
y(t) – непрерывный выходной сигнал.
x(t) |
|
e(t) |
|
u*(t) |
|
|
y(t) |
|
– |
ДЭ |
|
НЧ |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 9.1. Функциональная схема дискретно-непрерывной СУИМ
Звено, в котором происходит дискретизация сигнала, называется дискретным элементом.
Дискретный характер имеют релейные, импульсные и цифровые сигналы.
Релейные системы оперируют с сигналами, квантованными по амплитуде. Например, релейное управление может быть реализовано с помощью двухпозиционного реле в соответствии с выражением
u t U |
m |
sign t , |
|
|
||
|
|
|
|
|
|
|
где Um – амплитуда управляющего |
воздействия; sign t |
– |
||||
|
|
|
|
|
|
|
знаковая функция текущей ошибки t |
управления, |
|
|
|||
|
|
|
1, t 0, |
|
|
|
|
|
|
|
0, |
|
|
sign t 0, t |
|
|
||||
|
|
|
|
|
|
|
1, t 0.
В импульсных системах имеются сигналы, квантованные по времени (амплитудно-импульсные, широтно-импульсные, частот- но-импульсные, фазоимпульсные и др.). Период T квантования сигналов в таких системах, как правило, постоянный. Например, широтно-импульсное нереверсивное управление можно представить в виде
227
u t Um t ,
где t – скважность управления как некоторая функция
текущей ошибки управления, т.е. отношение времени tу генерации управляющего воздействия с амплитудой Um к периоду T
управления, t tyTt .
Цифровые системы управления оперируют с сигналами,
квантованными по времени и по амплитуде и представленными в виде цифровых кодов.
Квантование непрерывного сигнала по времени реализуется
спомощью импульсного модулятора, а квантование по амплитуде –
спомощью амплитудного квантователя (рис. 9.2).
|
|
T |
|
fф* t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f(t) |
|
f*(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N(T) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Квантователь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Импульсный модулятор |
Амплитудный квантователь |
Рис. 9.2. Квантование непрерывных сигналов в цифровых САУ
В соответствии с теоремой Котельникова – Шеннона импульсный модулятор должен обеспечивать дискретизацию непрерывного сигнала по времени с частотой, по крайней мере в 2 раза превышающей максимальную частоту изменения непрерывного сигнала. В любом случае частота квантования по времени должна быть выбрана такой, чтобы обеспечить наилучшее восстановление непрерывного сигнала (исходных данных) на интервале времени kT t (k + 1)T по дискретным выборкам в k-е моменты времени, где k – номер такта квантования, T – период квантования.
228

Таким образом, процесс восстановления непрерывного сигнала может рассматриваться как процесс экстраполяции. Функция f(t) на интервале T может быть представлена в виде ряда Тейлора:
f t f kT f |
|
kT t kT |
f kT |
t kT |
2 |
..., |
(9.1) |
|
2! |
|
|||||||
|
|
|
|
|
|
|
|
|
где f kT , |
f kT – оценкипроизводных вмоментвремениt = kT, |
|||||||
f kT T1 f kT f k 1 T ;
fkT T1 f kT f k 1 T
T12 f kT 2 f k 1 T f k 2 T ;
… .
Таким образом, для повышения точности экстраполяции сигнала требуется либо использовать информацию о выборках в прошедшие моменты времени, либо повышать частоту квантования по времени. Поскольку временное запаздывание оказывает неблагоприятное влияние на устойчивость систем управления с обратной связью, на практике обычно идут по второму пути, ограничиваясь удержанием лишь первого члена разложения ряда (9.1), т.е. на ин-
тервале T принимают f t f kT .
Импульсный модулятор, в котором удерживается лишь член f(kT), содержит два элемента (см. рис. 9.2) – квантователь непрерывного сигнала по времени с периодом T и фиксатор Ф нулевого порядка (экстраполятор нулевого порядка). Квантователь можно рассматривать как идеальный ключ, замыкающийся на бесконечно короткое время через каждый такт T. Тогда выходной сигнал квантователя будет представлять собой функцию
|
|
f * t f kT t kT , |
(9.2) |
k 0
229
где f kT – значение входного непрерывного сигнала в момент времени kT замыкания ключа, k = 0…∞; t kT – единичная им-
пульсная функция (δ-функция), генерируемая в момент времени k замыкания ключа.
Фиксатор сохраняет неизменным значение сигнала f kT
в течение периода T квантования. Передаточная функция фиксатора, реагирующего на импульсные воздействия вида (9.2), находится по формуле
W р |
fф* p |
|
1 e Tp |
. |
|
f * p |
p |
||||
ф |
|
|
|||
|
|
|
|
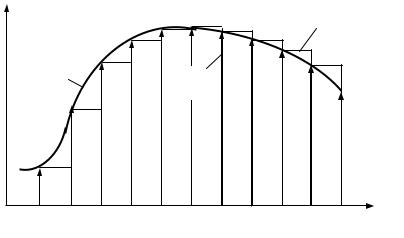
Реакция импульсного модулятора (квантователя и фиксатора) на некоторое непрерывное воздействие f (t) приведена на рис. 9.3. Вертикальными стрелками обозначена реакция (решетчатая функция) собственно квантователя, реализующего процесс дискретизации по времени.
fф* t
f(t) |
f(kT) |
|
0 T 2T |
… |
(k–1)T |
kT |
… |
t |
|
|
|
|
|
|
Рис. 9.3. Реакция импульсного модулятора на непрерывное воздействие f (t)
230