

Maloletov-diss
.pdf241
При задании матриц управления для составных машин следует различать случаи когда машина представляет собой замкнутую или разомкнутую кинематическую цепь. Для замкнутых кинематических цепей дополнительно к матрице управления должны быть сформированы дополнительные уравнения связей. Для разомкнутых кинематических цепей матрица управления формируется аналогично примерам (2.108) или (3.70). Так, например, для простейшего случая линейного шарнирного соединения N модулей матричное уравнение управления, задающее движение корпусов модулей в плоскости опорной поверхности, имеет вид:
[0 |
0 |
0 |
0 |
... |
1] |
[rN |
][BNr (t , q)] |
|
||||
1 |
0 |
0 |
0 |
... |
0 |
|
|
V 1x |
|
B1x (t , q) |
|
|
0 |
1 |
0 |
0 |
... |
0 |
|
|
V 1y |
|
B1y (t , q) |
|
|
0 |
0 |
1 |
0 |
... |
0 |
× |
r1 |
= |
B1r |
(t , q) |
(5.1) |
|
0 |
0 |
0 |
1 |
... |
0 |
|
|
r2 |
|
B2r |
(t , q) |
|
|
|
... |
|
|
|
|
|
... |
|
... |
|
|
здесь модуль, имеющий индекс 1 считается «главным», и для него задаётся не только угловая скорость ri в плоскости опорной поверхности, но и квазискорости центра модуля V1x, V1y.
Примером составных машин являются дождевальные машины кругового действия (рисунок 1.10) [49]. Эти машины представляют собой несколько однотипных модулей, совместно несущих ферменную многосекционную конструкцию, на которой размещены поливные форсунки, водопроводные трубы и шланги. В центр поля подводится вода и монтируется насосная установка, к которой подключается первая секция дождевальной машины, к которой в свою очередь подключается вторая секция и так далее. При движении ферма дождевальной машины описывает круг, в центре которого находится насосная установка (рисунок 5.1).

242
Рисунок 5.1 — Спутниковая фотография сельскохозяйственных угодий, обрабатываемых круговыми дождевальными машинами, 1 — обрабатываемое поле, 2 — необрабатываемый участок;
Одним из основных недостатков дождевальных машин кругового действия является наличие значительных участков необрабатываемой земли. Применение шагающих приводов в опорах дождевальных машин потенциально позволяет менять форму фермы дождевальной машины во время движения таким образом, чтобы обрабатываемый участок поля был не круглым, что приведёт к увеличению коэффициента использования земли.
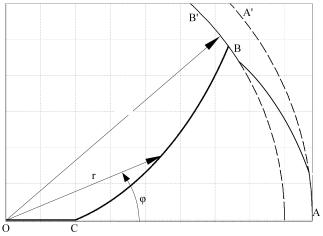
Максимальное расстояние от центра до границ обрабатываемого участка равно длине фермы. При относительном движении шагающих опор относительно друг друга форма фермы искривляется и расстояние от центра до границ участка уменьшается (рисунок 5.2). Дуга AA' — траектория движения конца прямолинейной фермы, AB — траектория движения конца фермы при плавном её искривлении, BB' — траектория движения конца искривлённой фермы.
При движении шагающих модулей по полю приходится преодолевать силы сопротивления движению со стороны грунта. Силы сопротивления движению принимаются одинаковыми для всех шагающих опор в связи с одинаковой нагрузкой на каждую опору и однородностью и изотропностью почвенного покрова. Изменением усилий в приводах шагающих движителей в пределах шага
243
пренебрегается. Вращение фермы изменённой формы вокруг центра O считается равномерным.
R
Рисунок 5.2 — Схема изменения формы обрабатываемого поля
Пренебрегая размерами отдельных секций машины, полагаем, что форма составной машины может изменяться плавно. В этом случае одним из частных критериев качества принимается минимум механической работы, необходимой для преодоления сил сопротивления.
R |
|
|
|
H 1=∫r √ |
r2 φr2+1d r |
(5.2) |
|
R0 |
|
||
где R0 — длина начального прямолинейного участка фермы; R — расстояние от центра до границы участка; r, φ — полярные координаты кривой; φr — производная φ по r.
Другим частным критерием качества считается показатель, определяющий кривизну фермы:
244
R |
|
H 2=∫φr2 d r . |
(5.3) |
R0 |
|
На форму составной машины накладывается также изопериметрическое условие, означающее, что длина машины должна оставаться постоянной:
R |
|
|
|
||||
∫√ |
r2 φr2+1d r=L−R0 |
(5.4) |
|||||
R0 |
|
||||||
Тогда подынтегральная функция качества с учётом условия (5.4) |
|||||||
приобретает вид: |
|
||||||
Φ=k1√ |
|
r+k2 φr2+μ√ |
|
|
|
||
φr2 r2+1 |
φr2 r2+1 |
(5.5) |
|||||
где k1, k2 — весовые коэффициенты критериев качества, |
μ — неопределённый |
||||||
множитель Лагранжа. |
|
||||||
При решении вариационной задачи, уравнение Эйлера имеет первый интеграл, равный константе, что даёт алгебраическое уравнение четвёртой степени относительно производной первого порядка φr:
4 k22 r2 φr4−4 c k 2 r2 φr3+(4 k22+c2 r2−r4 (k1 r+μ)2)φr2−4 c k 2 φr+c2=0 |
(5.6) |
где c — постоянная интегрирования, определяемая начальным значением кривизны фермы.
Известным аналитическим методом решения алгебраических уравнений четвёртого порядка является метод Феррари [143]. После нахождения корней алгебраического уравнения (физический смысл решаемой задачи позволяет
245
предполагать, что в практических расчётах будет реализовываться случай двух комплексных корней и двух действительных, отличающихся знаком), решение должно быть проинтегрировано, а полученный закон изменения φr подставлен в (5.4) для нахождения множителя μ .
В частном случае, полагая k2 = 0 и k1 = 1, уравнение Эйлера даёт выражение:
φr = |
|
|
c |
|
|
(5.7) |
|
|
|
|
|
||
2 |
2 |
2 |
||||
|
r √r |
(r+μ) −c |
|
|
|
|
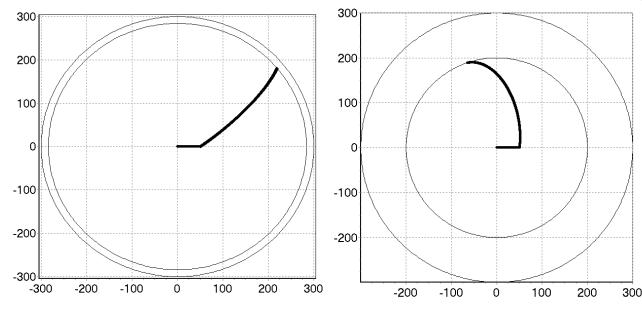
Примеры интегрирования уравнения (5.7) для различных начальных условий показаны на рисунке 5.3.
Рисунок 5.3 — Примеры формы составной машины длиной 300 м для различных начальных условий
246
5.2.Оптимизация структуры движителей и алгоритмов управления шагающей машины при маневрировании и преодолении препятствий
Кзадачам структурно-алгоритмической оптимизации относится применение разнотипных движителей в одной шагающей машине и построение алгоритмов управления ими. Примерами аппаратов с разнотипными движителями являются шагающая машина «Восьминог М», колёсно-шагающие машины ВНИИТМ (СССР, РФ), ATHLETE (США), Kaiser (Германия) и многие другие.
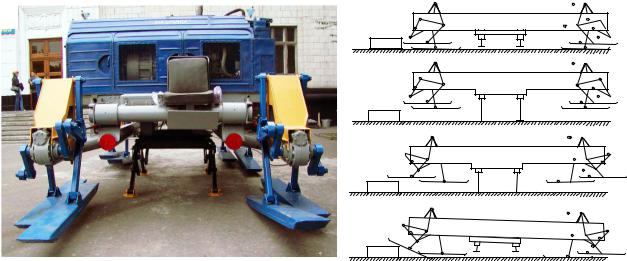
Шагающая машина «Восьминог М» (рисунок 5.4) отличается от первоначального варианта «Восьминог» наличием дополнительных подъёмноповоротных движителей. Дополнительные движители увеличивают сложность конструкции машины и системы управления, но значительно увеличивают её проходимость и снижают энергозатраты при выполнении некоторых манёвров.
а) |
б) I) |
II)
III)
IV)
Рисунок 5.4 — Шагающая машина «Восьминог М» с подъёмно-поворотными движителями: а) внешний вид машины, б) схема преодоления препятствия
При приближении шагающего аппарата к препятствию оператор-водитель машины (или автоматическая система управления) определяет тип препятствия, возможность его преодоления и принимает решение о продолжении движения с
247
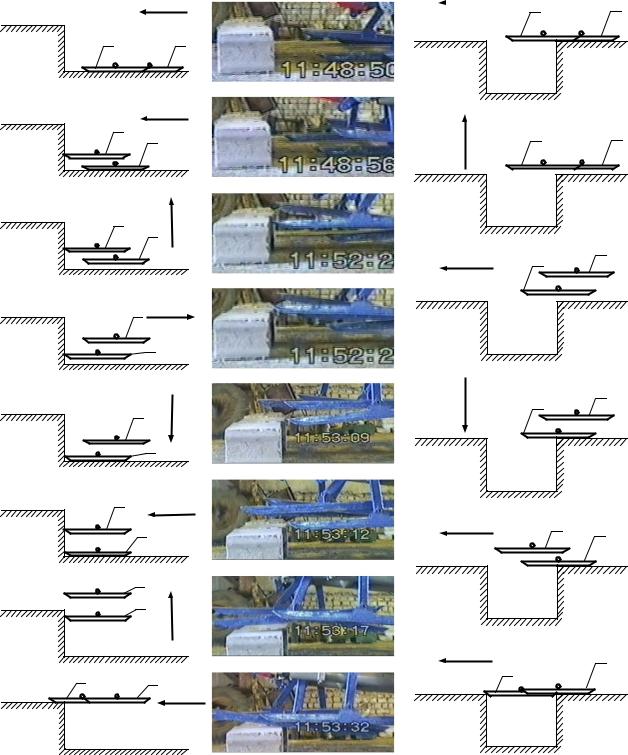
предстоящим преодолением препятствия или о прекращении движения. На рисунках 5.5, 5.6, 5.7 показаны схемы преодоления типовых препятствий ступени и траншеи, а также кадры экспериментов по преодолению препятствия.
Алгоритм преодоления ступени заключается в выполнении следующих действий.
1) Для того чтобы преодолеть ступень максимально возможной высоты необходимо, чтобы взаимодействие с грунтом очередного механизма шагания начиналось непосредственно перед препятствием. В общем случае такая ситуация не реализуется при курсовом движении, и стопа 1 механизма шагания занимает положение на грунте на некотором расстоянии от препятствия (рис. 5.5 а).
2)Стопа 2 смежного механизма шагания во время переноса упирается в ступень и привод курсового движения отключается (рис. 5.5 б).
3)Происходит подъём машины подъёмными движителями до отрыва стопы 1 от грунта (рис. 5.5 в).
4)Включается в обратную сторону привод курсового движения до соприкосновения стопы 1 с препятствием (рис. 5.5 г).
5)Привод курсового движения отключается и машина опускается на грунт (рис. 5.5 д).
6)Включается привод курсового движения до контакта стопы 2 с препятствием (рис. 5.5 е)
7)Включается привод подъёмных движителей до достижения стопой 2 в вертикальном направлении положения над препятствием (рис. 5.5 ж).
8)Включается привод курсового движения, стопа 2 занимает положение над препятствием (рис. 5.5 з), после чего машина опускается.
Дальнейшее движение машины осуществляется в маршевом режиме. Задние механизмы шагания преодолевают ступень аналогично.
248
а)
1 |
2 |
б) |
|
2 |
1 |
|
в)
2 |
1 |
|
г) |
2 |
|
|
|
1 |
д) |
2 |
1 |
е) |
|
2 |
|
|
|
|
|
1 |
ж) |
|
2 |
|
|
1 |
з) |
2 |
1 |
а) |
|
1 |
|
2 |
|
|
|
||||
|
б) |
1 2
в) |
1 |
2 |
|
|
г) |
1 |
2 |
|
||
|
|
д) |
2 |
1 |
|
е) |
1
2
Рисунок 5.5 — Алгоритм |
Рисунок 5.6 — |
Рисунок 5.7 — Алгоритм |
преодоления ступени |
Эксперимент по |
преодоления рва |
|
преодолению препятствия |
|
249
Алгоритм преодоления траншеи.
1)Для того, чтобы преодолеть траншею максимальной ширины необходимо чтобы взаимодействие с грунтом очередного механизма шагания происходило таким образом, чтобы менее половины длины стопы располагалось над траншеей. Однако в общем случае стопа механизма шагания может опуститься на грунт так, что более половины длины стопы оказывается над траншеей (рис. 5.7 а).
2)Во избежание потери машиной устойчивости из-за наступания в траншею привод курсового движения отключается, вместо этого включается привод подъёмных движителей (рис. 5.7 б).
3)После после вывешивания машины на подъёмных движителях привод курсового движения включается вновь (рис. 5.7 в) до тех пор, пока центр стопы не окажется над краем траншеи.
4)Машина опускается на стопы цикловых движителей (рис. 5.7 г) за счёт работы подъёмных движителей и продолжает курсовое движение (рис. 5.7 д). Так как длина стопы в машине «Восьминог» примерно равна длине шага, то опускаясь на грунт стопа очередного механизма шагания теоретически полностью перекрывает траншею (рис. 5.7 е). На практике с учётом реальных свойств грунта, ширина преодолеваемой траншеи меньше.
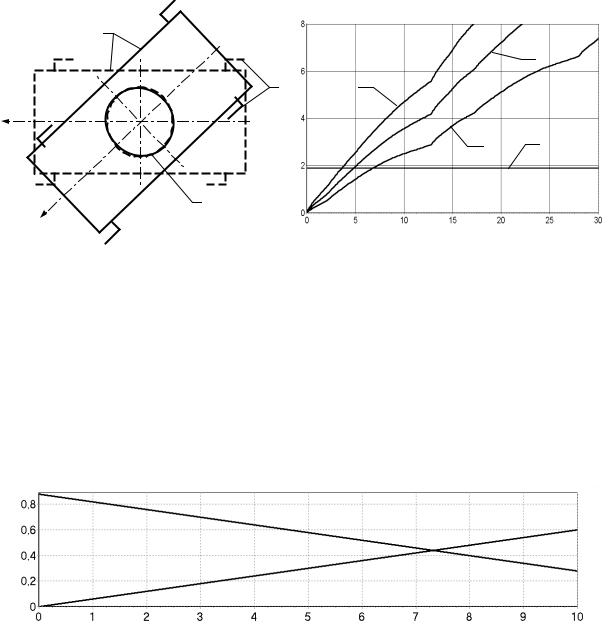
Схема поворота с использованием подъёмно-поворотных движителей показана на рисунке 5.8.а. На рисунке 5.8.б показаны энергозатраты на поворот для различных случаев.
При преодолении препятствий типа выступа противоречие возникает между высотой преодолеваемого препятствия H2 (чем больше, тем лучше) и высотой подъёма машины на подъёмных движителях H1 (чем меньше, тем лучше; высота подъёма равная нулю соответствует отсутствию подъёмных движителей). Зависимость этих показателей от соотношения их весовых коэффициентов показана на рисунке 5.9.
|
250 |
|
|
а) |
б)A, Дж |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
2 |
1 |
|
А |
|
3 |
4 |
|
3 |
|
|
Б |
Угол поворота, град |
|
Рисунок 5.8 — Поворот шагающей машины «Восьминог М»
а) 1 — рама шагающей машины, 2 — шагающие движители, 3 — поворотный круг; пунктир — положение машины перед поворотом, сплошная линия — положение машины после поворота, стрелки — направление движения перед (А) и после (Б) поворота; б) Энергозатраты на поворот. 1, 2, 3 — поворот реализуемый из-за разности скоростей по бортам машины при коэффициентах сцепления 0,8, 0,6, 0,4 соответственно; 4 — поворот реализуемый с помощью дополнительных механизмов подъёма и поворота
H1, H2, м
k1/k2
Рисунок 5.9 — Показатели высоты преодолеваемого препятствия H2 и подъёма машины H1 в зависимости от соотношения весовых коэффициентов