

Электрические машины конспект лекций
..pdfРис. 10.12. Возможные режимы работы асинхронного двигателя
s n0 ( n) n0
n0 n. n0
При этом ЭДС ротора E2s будет больше ЭДС неподвижного ротора. Соответственно возрастут и токи в обмотках двигателя, достигая недопустимо больших значений.
Поэтому в двигателях с фазным ротором при противовклю- чении в роторную цепь включается добавочное тормозное сопротивление, ограничивающее токи двигателя. Для двигателей с короткозамкнутым ротором этот режим может быть допущен только для быстрой остановки двигателя в течение очень короткого времени. В режиме противовключения двигатель питается и электрической энергией из сети через статор, и механической энергией через вал двигателя. Вся эта энергия превращается в потери в двигателе, главным образом в его роторной цепи. Поэтому этот режим очень невыгоден с точки зрения расхода энергии и опасен из-за нагрева двигателя. Механические характеристики при торможении противовключением расположены в IV квадранте (момент положителен, скорость отрицательна). На рис. 10.13 показан ряд таких характеристик для различных тормозных сопротивлений.
Несмотря на отмеченные выше отрицательные стороны, торможение противовключением встречается часто ввиду его простоты и удобства.
121
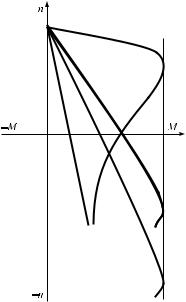
Рис. 10.13. Механические характеристики двигателя при торможении противовключением
ВОПРОСЫ
10.6.2.1.Четырехполюсный двигатель ( f1 50 Гц) работает в режиме противовклю- чения со скоростью 500 об/мин. Чему равно скольжение?
à) s 1,5; á) s 1,33; â) s 0,67.
10.6.2.2.Можно ли полу- чить тормозной момент при неподвижном роторе?
а) можно; б) нельзя.
10.6.2.3.Что надо сделать, чтобы получить тот же тормозной момент, но при меньшей скорости?
а) уменьшить напряжение на статоре;
б) увеличить тормозное сопротивление;
в) уменьшить тормозное сопротивление.
10.6.3. Динамическое торможение
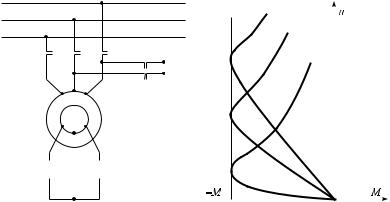
При динамическом торможении статорная обмотка двигателя отключается от сети переменного тока и подключается к источнику постоянного тока (рис. 10.14). Постоянный ток, протекая по обмотке статора, создает в двигателе постоянное неподвижное магнитное поле. При вращении ротора в этом поле под действием внешнего момента в роторной обмотке, замкнутой на тормозное сопротивление, индуктируется ЭДС и появляется ток. В результате взаимодействия роторного тока и магнитного поля на роторе создается тормозной момент. Характеристики динамического торможения для различных тормозных сопротивлений показаны на рис. 10.15. Динамическое торможение
122
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.14. Схема динамического |
|
Рис. 10.15. Механические |
|||||||||
торможения асинхронного |
характеристики двигателя |
||||||||||
|
|
двигателя |
при динамическом торможении |
||||||||
обеспечивает неплохие тормозные характеристики, экономично с точки зрения расхода энергии, но требует специального оборудования (источник постоянного тока нестандартного напряжения), что повышает стоимость установки. Поэтому динамиче- ское торможение применяется главным образом для мощных двигателей.
ВОПРОСЫ
10.6.3.1.Что надо сделать, чтобы получить при той же скорости меньший тормозной момент?
а) увеличить тормозное сопротивление; б) уменьшить тормозное сопротивление.
10.6.3.2.Как изменятся механические характеристики двигателя при динамическом торможении, если увеличить постоянный ток в статорной обмотке?
Лекция 11
РЕГУЛИРОВАНИЕ СКОРОСТИ
11.1. Регулирование скорости асинхронных двигателей
Хотя по своим регулировочным свойствам асинхронный двигатель уступает двигателю постоянного тока, все же существует ряд способов регулирования его скорости. Из (6.2) и (7.9) видно, что
n 60 f1 1 s . p
Следовательно, скорость асинхронного двигателя можно регулировать изменением скольжения (реостатное регулирование), изменением числа пар полюсов и изменением частоты статорного тока (частотное регулирование).
11.1.1. Реостатное регулирование
Реостатное регулирование широко применяется для двигателей с фазным ротором. Оно осуществляется путем включения в цепь ротора добавочного сопротивления (регулировочного реостата). Регулировочный реостат включается так же, как и пусковой (см. рис. 10.1), он должен быть рассчитан на длительную работу. По мере увеличения добавочного сопротивления скорость двигателя при той же нагрузке уменьшается. На рис. 11.1 показано семейство регулировочных реостатных характеристик, соответствующих различным сопротивлениям роторной цепи. Все характеристики сходятся в одной точке n0, так как скорость вращения магнитного поля остается неизмен-
124
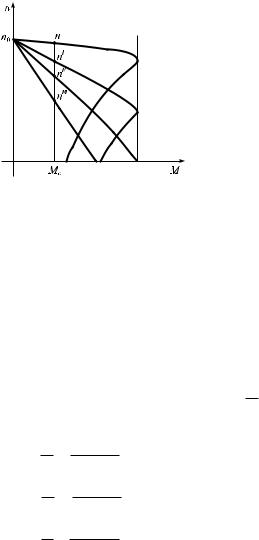
ной, и регулирование осуществляется за счет увеличения скольжения. Это обуславлива-
ет два крупных недостатка такой системы регулирования:
во-первых, значительные потери энергии в роторной цепи (в регулировочном реостате), связанные с большим скольже-
нием, а во-вторых, сужение диапазона регулирования по мере уменьшения нагрузки. Для устранения этих недостатков, очевидно, надо регулиро-
вать скорость вращения магнитного поля n0, не меняя значительно скольжения.
ВОПРОСЫ
11.1.1.1.Объясните, в результате каких явлений в роторной цепи при включении добавочного сопротивления в ротор скорость двигателя при том же вращающем моменте уменьшается.
11.1.1.2.Как изменяется отношение r2 при включении доба-
s
вочного сопротивления в ротор при реостатном регулировании?
à) r2 r2 räîá ;
s1 s2
á) r2 r2 räîá ;
s1 s2
â) r2 r2 räîá
s1 s2
(s1 è s2 — скольжения соответственно на естественной и реостатной характеристике при одном и том же моменте).
11.1.1.3. Какая из рассмотренных ранее формул подтверждает неизбежность больших потерь мощности в роторной цепи при реостатном регулировании?
125
11.1.2. Регулирование скорости |
|
|
||
изменением числа полюсов |
|
|
||
|
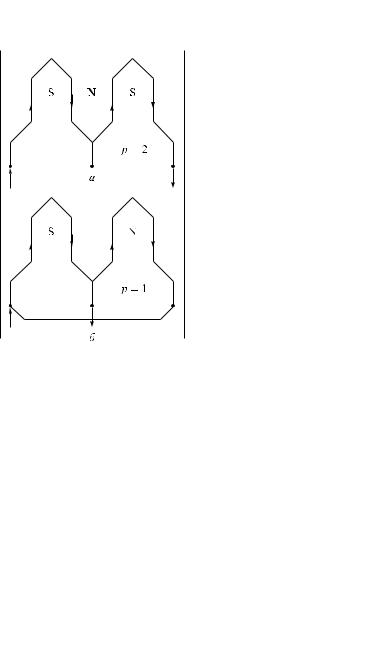
Принцип изменения числа |
|||
|
полюсов при работе двигателя |
|||
|
можно схематически предста- |
|||
|
вить себе следующим образом. |
|||
|
Будем считать, что фаза ста- |
|||
|
торной обмотки |
состоит из |
||
|
двух катушек. При последова- |
|||
|
тельном соединении этих кату- |
|||
|
øåê (ðèñ. 11.2, à) мы будем |
|||
|
иметь 4 полюса ( p 2), ïðè ïà- |
|||
|
раллельном (рис. 11.2, á) — |
|||
|
2 полюса ( p 1), òàê êàê â ïðî- |
|||
|
межутках |
между |
проводами |
|
|
с одинаковым |
направлением |
||
|
тока магнитного поля не будет. |
|||
|
Таким образом, делая до- |
|||
|
полнительный вывод от сере- |
|||
|
дины каждой фазы статорной |
|||
Рис. 11.2. Изменение числа полюсов |
обмотки и соединяя половины |
|||
двигателя переключением статорной |
фазных обмоток то последова- |
|||
обмотки |
тельно (рис. 11.3, à), то парал- |
|||
|
||||
|
лельно (рис. 11.3, á), будем по- |
|||
лучать различные числа полюсов. |
|
|
|
|
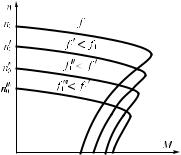
Характеристики двигателя при таком способе регулирова- |
||||
ния показаны на рис. 11.4. Двигатели подобного типа выполня- |
||||
ются двух-, трех- и четырехскоростными. Трех- и четырехскоро- |
||||
стные двигатели имеют две статорных обмотки, каждая на одну |
||||
или две скорости. Регулирование изменением числа полюсов |
||||
экономично по расходу энергии, но габариты, вес и стоимость |
||||
многоскоростного двигателя выше, чем обычного короткозамк- |
||||
нутого. Кроме того, число ступеней при регулировании мало. |
||||
Регулирование этим способом применяется только для двигате- |
||||
лей с короткозамкнутым ротором, так как при фазном роторе по- |
||||
требовалось бы переключать и роторную обмотку, что слишком |
||||
сложно. |
|
|
|
|
126 |
|
|
|
|
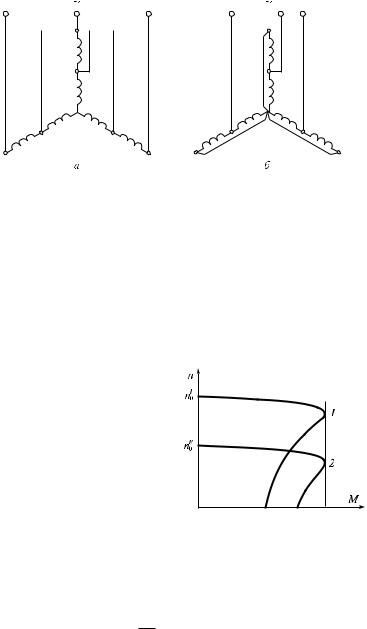
Рис. 11.3. Схема переключения трехфазной статорной обмотки на другое число полюсов
ВОПРОСЫ
11.1.2.1. Почему в той зоне статора, которая находится между проводниками с одинаковым направлением тока (см. рис. 11.2), нет магнитного поля?
11.1.3. Частотное регулирование
Регулирование скорости асинхронного двигателя изменением частоты статорного тока требует питания двигателя через специальный преобразователь частоты, позволяющий изменять частоту плавно.
При таком изменении полу- чается ряд регулировочных характеристик, показанных на рис. 11.5. Необходимо отметить, что при этом, наряду с изменением частоты, приходится пропорционально частоте изменять и напряжение, так, чтобы
Рис. 11.4. Регулировочные характеристики асинхронного двигателя при регулировании изменением числа полюсов
U1 const. f1
127
Это объясняется следующими причинами. Поскольку в уравнении напряжений статорной цепи (8.3) величина падения напряжения z1I1 весьма невелика по сравнению с величиной ЭДС E1, то можно считать
U1 E1 4,44 f1 w1K 01 .
Отсюда видно, что с изменением частоты при постоянном напряжении соответственно будет изменяться и магнитный поток. С уменьшением
частоты поток будет возрастать, что повлечет за собой увеличе- ние потерь в стали, повышение намагничивающего тока и ухудшение cos двигателя. Увеличение частоты и уменьшение потока снизит перегрузочную способность, а следовательно, и надежность работы двигателя. Поэтому для поддержания примерно постоянным магнитного потока Ф приходится одновременно с частотой регулировать и напряжение U1.
Частотное регулирование весьма экономично и дает хорошие регулировочные характеристики, но широкое применение его задерживалось из-за отсутствия надежных, достаточно простых и недорогих преобразователей частоты. В настоящее время в связи с появлением полупроводниковых тиристорных преобразователей частоты этот способ регулирования становится весьма перспективным.
ВОПРОСЫ
11.1.3.1.Почему критический момент двигателя Mê несколько снижается по мере уменьшения частоты (см. рис. 11.5)? Указание: используйте формулу (9.5).
11.1.3.2.Как изменится активный ток ротора I 2 cos 2 при том же вращающем моменте двигателя, если увеличить частоту f1 ïðè U1 const?
а) увеличится; б) не изменится; в) уменьшится.
128

11.2. Энергетические характеристики асинхронного двигателя
11.2.1. Коэффициент полезного действия
Коэффициент полезного действия асинхронного двигателя
|
P2 |
|
P2 |
|
P1 |
P2 P |
|||
|
|
определяется суммарными потерями мощности в двигателе P. Виды этих потерь рассмотрены в подразд. 9.1 при описании энергетической диаграммы двигателя. Величина номинального КПД зависит прежде всего от номинальной мощности двигателя. Для двигателей малой мощности он равен ~0,7, а для мощных двигателей доходит до 0,96. Влияет на величину íîì и номинальная скорость двигателя. Для быстроходных двигателей íîì несколько выше, чем для двигателей с меньшей номинальной скоростью.
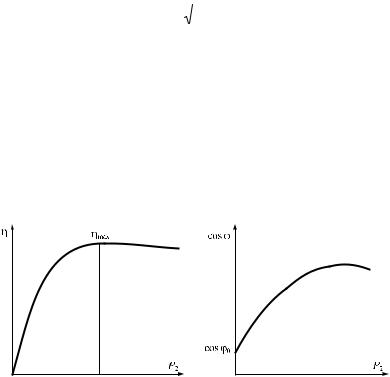
Рабочий КПД двигателя зависит от нагрузки, так как основные потери в обмотках двигателя определяются токами, связанными с нагрузкой. Зависимость f (P2 ) подобна такой же зависимости для трансформатора (рис. 11.6). Максимальный КПД обычно бывает при нагрузках порядка 80 % от номинальной.
ВОПРОСЫ
11.2.1.1. Чему приближенно равен оптимальный коэффици-
ент загрузки двигателя îïò P2 , при котором двигатель бу-
P2íîì
дет работать с максимальным КПД?
11.2.2. Коэффициент мощности
Поскольку при работе двигателя неизбежно образование магнитных полей (основного магнитного поля и полей статорного и роторного рассеяния), то неизбежна и реактивная мощность, необходимая для создания этих полей. В соответствии с Г-образ- ной схемой замещения двигателя (см. рис. 8.3) она будет следующей:
1 |
x |
m |
2 |
1 |
x |
|
|
2 |
. |
(11.1) |
0 |
2 |
2 |
||||||||
Q 3 x |
I |
|
3 x |
|
I |
|
129
В этом выражении первый член в правой части (реактивная мощность основного поля и поля статорного рассеяния от тока холостого хода) мало зависит от нагрузки двигателя, а второй (реактивная мощность полей рассеяния, роторного и статорного от нагрузочной составляющей статорного тока) всецело определяется ей. Коэффициент мощности двигателя вследствие нали- чия реактивной мощности будет всегда меньше единицы:
cos |
|
|
P1 |
|
. |
|
|
|
|
|
|||
P12 |
Q 2 |
|||||
|
|
|
|
Номинальный коэффициент мощности, также как и КПД, зависит прежде всего от номинальной мощности двигателя и находится в пределах от 0,65 (для двигателей малой мощности) до 0,94 (для мощных двигателей). Двигатели с более высокой номинальной скоростью имеют несколько больший cos .
Как это видно из формулы (11.1), реактивная мощность связана с его нагрузкой, и, следовательно, cos также будет зависеть от нагрузки. Зависимость cos f P2 показана на рис. 11.7.
Необходимо обратить внимание на то, что, в отличие от КПД, cos 0 при холостом ходе двигателя не равен нулю (так как
Рис. 11.6. Зависимость КПД двигателя |
Рис. 11.7. Зависимость коэффициента |
от нагрузки |
мощности двигателя от нагрузки |
не равна нулю потребляемая мощность P1), а составляет величи- ну порядка 0,1–0,15. Максимальный cos имеет место, опять-та- ки в отличие от КПД, при значительных перегрузках двигателя.
130