Глава 7. Представление поверхностей и работа с ними
ствующие точке на кривой пересечения. Изменение выбранного произвольнаго
значения дает все остальные точки кривой пересечения. Недостаток этого мето
да в том, что его сходимость зависит от начальных приближений неизвестных JJ
уравнении (7.50) [49]. Более того, он не всегда позволяет найти все кривые пере
сечения. Другимц словами, при больших интервалах изменения про11звольно за даваемого параметра некоторые кривые могут быть потеряны полностью, а неко
торые - частично.
Методы из второй категории основаны на теории последовательного деления [37].
Каждая поверхность последовательно делится на множество частей до тех пор,
пока каждая из них не будет представлять собой нечто близкое к плоскому четьt
~·~хугольнику. Затем четырехугольники одной поверхности проверяются на пе
ресечение с четырехугольниками другой поверхности. В результате получаются
пары пересекающихся четырехугольников, а точки прямых, по которым они пе
ресекаются, дают хорошее начальное приближение для уравнения (7.50). Одна ко может оказаться непросто проверять пары четырехугольников в правильной
последовательности так, чтобы точки пересечения образовывали кривые. Для nреодоления этой проблемы был предложен альтернативный подход [124, 90).
В методе Пенга из всех четырехугольников пересекающихся nоверхностей выби рается лишь одна nересекающаяся пара, которая дает первый се~ент кривой пе ресечения. Один из концов этого сегмента берется в качестве начальной точки,
от которой производится поиск следующей точки пересечения. Другими сло вами, ищется новая пара четырехугольников, которая даст. соседний сегмент
кривой пересечения, одним из концов которого будет начальная точка поиска. Пересечение новой пары четырехугольников даст две точки, одна из которых бе рется в качестве нового конца кривой, от которого начинается nоиск следующей nары четырехугольников. Пенг хранил четырехугольники в квадраитио~t дереве1
(quadtree), предложенном Саметом [135] для повышения эффективности поисi<а соседней пары. Процедура поиска продолжается до тех пор, пока не будет до
стигнута одна из границ поверхности, после чего поиск начинается с другого кон
ца первого сегмента. Точные координаты точек пересечения получаются реше
нием уравнения (7.50) с использованием концов сегментов в качестве начально го nриближения. Эта процедура повторяется со всеми начальными сегментами до тех пор, пока не будут найдены все кривые. В приложении К мы расскажем,
каким образом следует искать все сегменты кривых пересечения.
Методы, основанные на теории последовательного деления, требуют большего
объема вычислений по сравненцю с методами первого класса, но зато они реже
пропускают кривые пересечения. В приложении К мы рассмотрим расчет пере сечения NURBS-пoвepxнocтeii по методу Пенга.
Вопросы и задачи
1.Коническая поверхность получается вращением отрезка, соединяющего точ
ки (2, О, О) и (1, 2, О) вокруг оси у на 180°.
1 Квадрантное дерево представляет собой двумерный аналог октантнога дерева. Прямо
угольник, описывающий исходный объект, 1юследователыю делится на четыре части дiJ тех пор, пока не будет достигнуто нужное разрешение.
ложите, что изменение параметра и перемещает точку по окружности на
плоскости, перпендикулярной оси у, а параметр v изменяет положение ок
ружности относительно этой оси.
2)Аппроксимируйте коническую поверхность бикубическим лоскутом. Дру
гими словами, вы должны вывести матрицу геометрических коэффицен
тов для формулы (7.18).
3)Вычислите координаты точки бикубического лоскута, соответствующей
значениям параметров и= 0,5 и v = 0,5, и сравните ее с результатом вычис
ления по точному параметрическому уравнению.
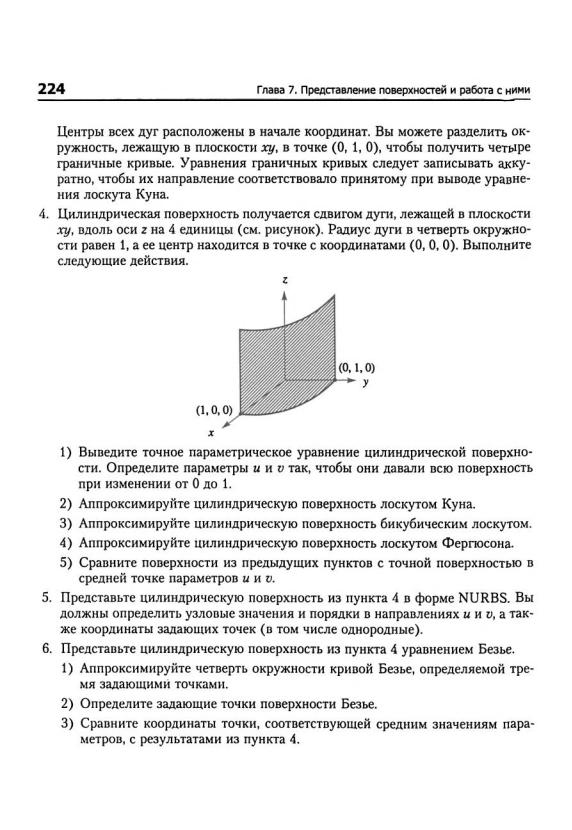
2.Представьте поверхность, изображенную на приведеином ниже рисунке, би
линейной поверхностью.
z
х
1) Определите P 1(s) и P 2(s), описывающие окружность при изменении s от О
ДО 1.
2) Представьте коническую поверхность функцией r(s,t), осуществляющей ли нейное сопряжение P 1(s) и P 2(s). Пусть параметр t также меняется от О до 1.
3) Подставьте значение t = 0,5 в функцию r(s,t) и объясните, что при этом по-
лучается.
3.Аппроксимируйте поверхность, ограниченную тремя дугами (см. рисунок), при помощи лоскута Куна.
z
х
Глава~
Метод ·конечных элементов
В современном проектировании широко используются различные программные
САЕ), позволяющие оценивать проекты на каждом этапе процесса разработки.
Средства САЕ позволяют анализировать кинематику или динамику поведения
проектируемого агрегата. К этой категории относятся такие пакеты, как ADAMS
и DADS (см. главу 2). С точки зрения этих пакетов каждый компонент агрегата
рассматривается как тело с сосредоточенной массой. В некоторых случаях сред ства САЕ позволяют определить распределение напряжений или температур в
механических компонентах, рассчитанных на физическую или тепловую нагруз
ку. Возможно также проведение вибрационного анализа компонента, на который
будет воздействовать динамическая нагрузка. Перечисленные задачи решаются
при помощи средств анализа методом конечных элементов. Примерами коммер ческих программ конечноэлементного анализа являются NASTRAN и ANSYS (см. главу 2).
На заре своего существования метод конечных элементов применялея глав'ным
образом в строительной механике. Словосочетание коиечиый элемгит (finite element) появилось в статье Клофа [36], где предлагалось применять новый метод для анализа напряжений в плоскостях. Многие коммерческие пакеты, основан
ные на методе конечных элементов, изначально предназначались для решения
строительных задач. Од~:~ако вскоре стало ясно, что методы конечных элементов
имеют более широкую область применения: задачи теплопереноса, распределе
лиза и многие другие. С ростом вычислительных возможностей компьютеров
расширился диапазон и возросла сложность задач, доступных решению методом
конечных элементов. Применеине метода конечных элементов к дверной ручке холодильника для расчета распределения температуры при заполнении формы для литья под давлением жидкой пластмассой демонстрирует рис. 8.1. В качест ве примеров программ для решения задач механики жидкостей методом конеч
ных элементов можно привести пакеты C-MOLDи MOLDFLOW, предназна ченные для моделирования течения жидкого пластика в форме для литья под
давлением.
Главное отличие метода конечных элементов от динамического или кинематиче
ского анализа заключается в том, что в первом область задачи рассматривается
как непрерывное пространство (континуум), а во втором - как набор дискрет
ных (сосредоточенных) элементов. В этой главе мы изучим основные концепции
средств анализа методом конечных элементов. Мы не станем уделять внимание
228
Глава 8. Метод конечных элементов
мы1 (в р-версии), тем точнее оказывается решение, но тем дороже оно стоит с
вычислительной точки зрения. Различные виды конечных элементов рассматри
ваются в разделе 8.3. Другая проблема - построение сетки, особенно для объек та сложной геометрии. Создание трехмерных сеток конечных элементов обычно представляет собой трудоемкий и кропотливый процесс. Сейчас ведутся актив
ные разработки систем автоматизированного построения сеток, которые могли бы подключаться к системам геометрического моделирования. Такие системы
позволили бы полностью интегрировать средства САМ и САЕ. Краткий обзор на
данную тему дается в разделе 8.4.
После аппроксимации исходного объекта конечными элементами с должным ко
личеством узлов каждому узлу сопоставляется неизвестная величина, которая
ищется в процессе решения задачи. Например, для рис. 8.3, а неизвестными были бы смещения узлов по координатам х и у. Отсюда следует, что у каждого
узла будет две степени свободы, а у задачи в целом будет 2n степеней свободы, если число узлов равно n. В разделе 8.2 мы покажем, что смещение в любой точ
ке конечного элемента выводится из смещений его узлов при помощи функций
формы, поэтому неизвестными могут быть только смещения узлов. Функции формы служат лишь для того, чтобы вычислять значения неизвестных внутри
элемента по заданным значениям на его узлах2• После вычисления смещений
программа может перейти к расчету деформаций как частных производных от функции смещения, а по деформациям рассчитываются напряжения.
Аппроксимировав область задачи набором дискретных конечных элементов, мы
должны задать характеристики материала и граничные условия для каждого
элемента. 'указав различные характеристики для разных элементов, мы можем
анализировать поведение объекта, состоящего из разных материалов. Граничные условия (смещение, внешняя сила или температура) обычно задаются на внеш ней границе объекта. Эти условия должны быть выражены в виде значений сме
щенщr, силы или температуры в граничных узлах некоторых конечных эле
ментов. После задания граничных условий для всех внешних узлов программа конечноэлементного анализа формирует систему уравнений, связывающую гра ничные условия с неизвестными (смещениями или температурой в узлах или
коэффициентами функции формы в. р-версии), после чего решает эту систему
относительно неизвестных. Процесс формирования и решения системы уравне ний рассматривается в разделе 8.2.
После нахождения значений неизвестных пользователь получает возможность рассчитать значение любого параметра в любой точке любого конечного элемен
та по той же функции формы, которая использовалась при построении системы уравнений. Выходные данные программы анализа методом конечных элементов
обычно представляются в числовой форме. В задачах механики твердых тел
выходными данными являются смещения и напряжения. В задачах на теnло-
1 Функции формы - независимые полиномы, определяющие аппроксимацию перемен
ной, относительно которой решается задача.
2 В р-версии функция формы представляет собой полином высокого порядка, а коэффи
циенты этого полинома также считаются неизвестными, которые ищутся в процессе ре
шения задачи.
8.2. Формулировка метода конечных элементов
229
перенос выходными данными являются температуры и тепловые потоки через
конкретные элементы. Однако по числовым данным пользователю бывает за
труднительно получить общее представление о поведении соответствующих па
раметров. Графические изображения обычно более информативны, поскольку
дают возможность изучить поведение параметров на всей области задачи. Ана
лиз поведения параметров может производиться при помощи постпроцессора,
который строит кривые и контурные графики переменных по данным програм мы конечноэлементного анализа. Для задач строительной механики возможно
отображение деформированных тел вместе с недеформированными. В этой об
ласти для систем автоматизированного конструирования очень важными стано
вятся функции компьютерной графики.
Мы завершим вводный раздел обсуждением ограничений метода конечных эле
ментов. Многие конструкторы страдают чрезмерной верой в мощь этого метода,
не имея представления о его ограничениях; они примимают неправильные ре
зультаты без тени сомнения. К преимуществам метода конечных элементов от
носится возможность работы с телами произвольной геометрии и неоднородны
ми материалами. Однако суть метода состоит в делении области задачи на набор
конечных элементов и поиске наилучшего решения, непрерывного •внутри• эле
ментов, но имеющего возможность претерпевать скачки на их границах. Напри мер, деформация на границе конечных элементов кронштейна (рис. 8.3, а), мо жет испытывать скачок, невозможный с точки зрения физики. Величина такого скачка часто служит мерой точности решения, полученного методом конечных элементов. Неточиости такого рода зависят от количества элементов, их размера
истепени функции формы, используемой внутри каждого из элементов.
8.2.Формулировка метода
конечных элементов
Как уже отмечалось, программы анализа методом конечных элементов формиру ют системы уравнений с неизвестными, учитывая заданные Граничные условия. Затем система уравнений решается относительное неизвестных, а по найденным
решениям рассчитываются значения характеристик внутри элементов. В этом разделе мы рассмотрим процедуру построения системы уравнений в классиче ском варианте метода конечных элементов (h-версия). Чтобы вывести уравне
ния для задач строительной механики, мы воспользуемся принцилом виртуаль
ных перемещений. Мы будем следовать схеме именования переменных, принятой в работе [10], чтобы заинтересовавшийся читатель мог с легкостью
найти в ней ответы на свои вопросы. Для вывода системы уравнений из основ ных дифференциальных уравнений исnользуется иная процедура, описанная в приложении Л.
Рассмотрим трехмерный объект произвольной формы, находящийся в равновес ном состоянии под воздействием некоторой нагрузки (рис. 8.4). Силы трения,
действующие на поверхность, обозначим f 5, массовые силы - f 8 , а сосредоточен
ные внешние силы- Fi. В общем случае эти силы раскладываются на компонен
ты, параллельные осям координат:
230 Глава 8. Метод конечных элементов
f
[!
,
f
s
= fy.
,
F i
=[Fi]
(8.1)
в
= jyв]
[Js]
Fy .
х
х
х
в
j·\
F'
!z
z
z
z
у
х
f;_!rв
fхв Fz;+ F
~Yi
Fx;
Рис. 8.4. Трехмерный объект с внешними силами
Обозначим смещения произвольной точки объекта (Х, У, Z) по сравнению с !(ОН
фигурацией в отсутствие нагрузки символом U. Тогда
uт = [U(X,Y,Z)
V(X,Y,Z)
W(X,Y,Z)],
(8.2)
где индекс т означает транспонирование. Смещения U приведут к возникнове
нию деформаций
(8.3)
и соответствующих напряжений
t т = [txx tl'l'
tzz t.\Т
t17
tzx ].
(8.4)
Наша задача состоит в том, чтобы рассчитать U, Е, t
в точке (Х,
У, Z) по задан
ным внешним силам. Возможно, вы знакомы со следующим подходом к этой за
даче: основные дифференци<Uiьные уравнения равновесия записываются путем
н<Uiожения условия равновесия на элементы объекта, после чего эти урашiсния
решаются с учетом граничных условиi1 и условий совместности.
Существует равноправный подход к описанию равновесия объекта - принциП
вирту<Uiьных перемещениl!. Согласно этому принципу, равновесие объекта тре
бует, чтобы для любых совместных M<UIЫX вирту<Uiьных смещений, удовлетво
работа была равна полной внешней виртуальной работе. Отсюда уравнение рав новесия может быть записано следующим образом:
r f:тt
dV = rUТfвdV + fus· •
f·• dS + "u;"'F;
(8.5)
k
Ji'
1
1
s
L.
1
Левая часть уравнения (8.5) описывает виртуальную внутреннюю работу, вы
полняемую рс<Uiьными напряжениями на вирту<Uiьных деформациях, вызванных
виртуальными смещениями U. В этом выражении
е = [Ехх El'l' Ezz У.\Т У!7 Yzx ).
(8.6)
8.2. Формулировка метода конечных элементов
231
Слагаемые в правой части выражения (8.5) описывают внешнюю работу, выпол
няемую реальными силами f 8 , fs и F; на виртуальных перемещениях U, где
uт = [U(X,Y,Z) V(X,Y,Z) Z(X,Y,Z)].
(8.7)
Верхний индекс S у вектора U означает виртуальное смещение на поверхности,
а верхний индекс i - смещение в точке приложения сосредоточенных сил Fi.
Уравнение (8.5) включает также требования на совместимость и конститутпв
ность непрерывных функций смещений, которые удовлецюряют граничным
условиям. Напряжения вычисляются через деформащпr по соответствующим
материальным уравнениям. Поэтому принцип виртуальных перемещений вклю
чает все требования, которым должно удовлетворять решение задачи строитель
ной механики.
Посмотрим теперь, как из уравнения (8.5) получаются уравнения методС;J. конеч
ных элементов. Начнем с аппроксимации объекта, изображенного на рис. 8.4, сеткой конечных элементов. Элементы соединяются друг с другом в узловых точках, которые находятся на их границах. Смещение в любой точке с координа
тами (х, у, z) в локальной системе координат элемента считается функцией сме
щений в узловых точках1• То есть длЯ элемента т высказывается предположе
ние, что
u<т>(x,y,z) = н<т>(х,у,z)й,
(8.8)
где н<т>
интерполяционная матрица смещений, а U- вектор смещений на
всех узлах. Если общее количество узлов равно N, вектор Uзапишется следую
щим образом: -,.
v1
v2
w2
U
= [u1
lt'1 1 и2
U.v V.v W.v ].
(8.9)
Это выражение можно переписать так:
(JT
= [Ut
u2
Из
и"],
(8.10)
где И; может задавать смещение в любом направлении, а n соответствует обще
му количеству степеней свободы. Далее мы будем использовать это выражение
дляU.
Хотя в уравнении (8.10) перечисляются смещения всех узлов, а следовательно, эти смещения входят и в выражение (8.8), для каждого конкретного элемента
смещения внутри него определяются только смещениями в его собственных уз лах. В уравнение же (8.8) все узлы вошлн потому, что это облегчает процесс объ
единения матриц отдельных элементов в матрицу структуры в целом, как будет.
показано ниже.
Уравнение (8.8) позволяет вычислить деформации:
E(m>(x,y,z) = B(m) (x,y,z) U.
(8.11)
Строки матрицы деформациii-смещеннй В<т> из уравнения (8.11) получаются
дифференцированиеi\I и объединением строк матрицы Н<т> Производные мат
риц н<т} И B(m) раССМаТрИВаЮТСЯ В ПрИI\Iере 8.1.
1 В р-всрсии смещение включает лвс составляющне. Первая онределяется смещениями уз
лов, как и в (8.8), зато вторая онисьшает ($Jtерархическос» смещение, выражаемое поJtи tюмом произвольной стснени. Подробнее о р-всрснн I<Онсчtюэлсмснтного анализа можно прочитать в работах [103, 148].