

книги / Теория электропривода.-1
.pdfможно установить, что добавление МДС независимой ОВ смещает кривую Ф(Iя) по оси абсцисс на отрезок –IНВ. Соответственно, естественная электромеханическая характеристика двигателя со смешанным возбуждением (рис. 4.30, б) повторяет форму характеристики двигателя с последовательным возбуждением, если ось ординат сместить на значение этого тока. При токе Iя = 0 ω = ω0, и при изменении нагрузки в двигательном режиме от 0 до Мн скорость изменяется в более широких пределах, чем у двигателя с независимым возбуждением.
При переводе двигателя в генераторный режим изменение знака МДС обмотки последовательного возбуждения приводит к быстрому снижению потока (см. рис. 4.30, б), который при Iя = –IНВ становится равным нулю. Этому значению тока якоря соответствует асимптота, к которой приближается кривая ω = f(Iя) при ω → ∞.
Естественная механическая характеристика (рис. 4.30, в) по форме отличается от электромеханической характеристики. Поскольку при Iя → –IНВ поток стремится к нулю, зависимость ω = f(М) в генераторном режиме имеет максимум и при возрастании скорости асимптотически приближается к оси ординат слева.
Эффективность режима рекуперативного торможения у двигателя со смешанным возбуждением из-за размагничивающего действия обмотки последовательного возбуждения существенно снижается.
Модуль жесткости механической характеристики с ростом нагрузки в этом режиме уменьшается до значения β = 0, соответствующего максимуму момента Мmах, а само значение этого момента невелико.
Более благоприятные условия рекуперативного торможения обеспечиваются путем отключения обмотки последовательного возбуждения при переходе в генераторный ре-
121
жим, при этом в генераторном режиме механическая характеристика становится линейной и имеет жесткость
|
k2 |
Ф2 |
|
|
βг = |
|
НВ |
= const. |
(4.41) |
|
|
|||
|
|
Rя |
|
|
Таким образом, характеристики двигателя со смешанным возбуждением занимают промежуточное положение между характеристиками двигателей с независимым и с последовательным возбуждением.
4.5. Электропривод постоянного тока управляемый преобразователь – двигатель
Вэлектроприводах постоянного тока предпочтительным является способ управления режимами изменением напряжения, подводимого к якорной цепи двигателя при Ф = const. Для реализации этого способа питание двигателя должно осуществляться от управляемого источника, который может быть выполнен на основе либо регулируемого электромашинного агрегата, либо управляемого выпрямителя.
4.5.1.Система с электромашинным преобразователем
Вэтом случае электропривод носит название «система генератор – двигатель» (Г–Д). Система генератор – двигатель постоянного тока устарела и морально, и технически, не используется в новых разработках с 80-х гг. ХХ в., однако продолжает эксплуатироваться в установках большой мощности (сотни киловатт и выше), например в электроприводах клетей прокатных станов и экскаваторах.
Схема силовых цепей системы генератор – двигатель приведена на рис. 4.31.
122
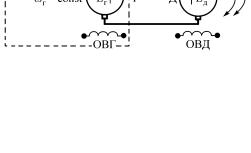
Рис. 4.31. Силовая схема системы Г–Д
В системе Г–Д двигатель получает питание по цепи обмотки якоря от отдельного генератора. Генератор Г вращается, как правило, синхронным приводным двигателем ПД, который работает с опережающим cosϕ. Это позволяет компенсировать реактивную мощность предприятия, что важно при больших мощностях генератора. В качестве приводного двигателя используются также асинхронные двигатели в силу их простоты, надежности, однако их скорость вращения зависит от нагрузки, что приводит к снижению ЭДС генератора.
Управление процессами пуска, реверса и торможения в системе Г–Д перенесено из силовой якорной цепи в маломощные цепи обмоток возбуждения электрических машин. Регулируя напряжение, подводимое к обмотке возбуждения генератора ОВГ, можно изменять его ЭДС:
Eг = kг · Фг · ωг, |
(4.42) |
где kг – конструктивный коэффициент генератора постоянного тока.
Из (4.42) следует, что при постоянной скорости вращения генератора Г его ЭДС будет определяться потоком возбуждения Фг, который регулируется путем изменения подводимого к обмотке возбуждения генератора напряжения.
123
Уравнения электромеханической и механической характеристик электропривода с ДПТ НВ, работающего в системе Г–Д, определяются следующими выражениями:
ω = |
Ег |
|
− |
RяΣ |
I |
, |
(4.43) |
|||||
k Фд |
k Фд |
|||||||||||
|
|
|
|
|
я |
|
|
|||||
ω = |
|
Eг |
− |
|
|
RяΣ |
|
M . |
(4.44) |
|||
|
|
|
(k Фд )2 |
|||||||||
|
k Фд |
|
|
|
|
|||||||
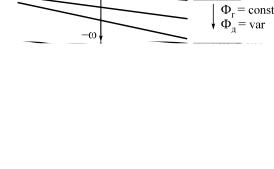
Электромеханические (и механические) характеристики системы генератор – двигатель располагаются в четырех квадрантах и приведены на рис. 4.32.
Рис. 4.32. Электромеханические характеристики системы Г–Д
Анализ уравнения (4.43), описывающего электромеханические характеристики электропривода, показывает, что характеристики системы генератор – двигатель при изменении потока возбуждения генератора Фг или его ЭДС Eг представляют взаимно параллельные прямые линии. Характеристики остаются постоянной жесткости, но меньшей, чем у двигателя, так как определяются суммарным сопротивлением обмоток якоря генератора и двигателя. Эти характе-
124
ристики показаны на рис. 4.32 в зоне изменения скорости при переменном потоке Фг обмотки возбуждения генератора.
При изменении полярности напряжения обмотки возбуждения генератора, как следует из (4.43), меняется полярность его ЭДС и, тем самым, направление вращения электродвигателя.
Основным способом торможения двигателя в системе является режим рекуперативного торможения. Если уменьшать возбуждение генератора, то ЭДС двигателя станет больше ЭДС генератора и двигатель превращается в генератор, ток в якорной цепи которого, определяемый разностью ЭДС, изменит направление на противоположное. Поскольку режим работы генератора становится двигательным, он вращает агрегат Г–ПД, синхронный двигатель которого, в свою очередь, становится генератором, работающим параллельно с сетью.
Система генератор – двигатель может работать в режиме регулирования скорости с ослабленным полем двигателя. Электромеханические характеристики при работе с переменным потоком возбуждения двигателя Д (Фд = var , Фг = const) приведены на рис. 4.32 как для положительного, так и отрицательного направления вращения двигателя.
Режиму динамического торможения системы соответствует одна характеристика, проходящая через начало координат.
В системе электропривода Г–Д в отличие от релейноконтакторных схем управления двигателями постоянного тока отсутствуют громоздкие пусковые реостаты, а также потери энергии при пусках, реверсах, торможениях и при регулировании скорости. Диапазон регулирования скорости составляет до 1:30.
Основным недостатком систем генератор – двигатель является наличие двух вращающихся машин в агрегате преобразователя и превышение в три раза мощности электрических машин над мощностью исполнительного двигателя.
125
4.5.2. Система тиристорный преобразователь – двигатель
Во втором случае управляемый преобразователь представляет собой статическое устройство – тиристорный управляемый преобразователь (ТП).
Преимущества систем ТП–Д по сравнению с Г–Д:
1)малая инерционность, что позволяет обеспечить высокое быстродействие электропривода;
2)электропривод имеет высокую надежность, достаточно прост в обслуживании;
3)высокий КПД (более 95 %);
4)большая экономия меди и черных металлов (в 2– 2,5 раза) при равной мощности;
5)высокая точность управления, особенно в системах
сСИФУ;
6)малые габариты и масса, блочная компоновка привода позволяют сократить требуемые производственные площади, уменьшить капитальные затраты на установку;
7)системы ТП–Д позволяют получить в замкнутых системах управления практически любые требуемые механические характеристики.
Наряду с этим системы ТП–Д имеют и недостатки:
1)значительные пульсации тока на выходе увеличивают нагрев двигателя и ухудшают его коммутацию;
2)перегрузочная способность ТП ниже, чем генераторного;
3)для обеспечения рекуперации необходимо применение специальных схем, в частности с двумя комплектами вентилей, что повышает сложность и стоимость электропривода;
4) снижение cosϕ при глубоком регулировании напряжения и скорости двигателя вниз;
126

5)возможность тяжелого аварийного режима «опрокидывание инвертора» из-за неправильной настройки системы управления;
6)генерирование высших гармоник в сетях питания. Электроприводы по системе ТП–Д промышленностью
выпускаются в виде блочных изделий – комплектных однозонных и двузонных тиристорных электроприводов. В однозонных приводах выход ТП подключается к якорю двигателя и регулирование скорости осуществляется за счет изменения напряжения на якоре ДПТ. В двухзонных ЭП используется два ТП: один работает на якорь, а второй – на обмотку возбуждения, и регулирование угловой скорости осуществляется как изменением напряжения на якоре, так и за счет изменения потока возбуждения (напряжения на обмотке возбуждения).
Система ТП–Д является техническим решением практически везде, где используется электропривод постоянного тока, хотя в последние годы активно вытесняется частотнорегулируемым асинхронным электроприводом.
4.5.2.1. Краткие сведения из теории работы ТП
Работа ТП возможна в выпрямительном или инвертор-
ном режимах с непрерывным или прерывистым током в цепи нагрузки.
Рассмотрим работу однофазного тиристорного преобразователя с двигателем постоянного тока, питающегося от идеального трансформатора с эквивалентной схемой замещения [5], схема которого приведена на рис. 4.33.
Напряжение источника переменного тока обозначено на схеме как u2 = 2U2sin(ωt +α), где α – угол отпирания тири-
стора, |
тогда момент отпирания тиристора при t = 0 |
u2 = |
2U2sinα. ЭДС якоря двигателя в общем случае имеет |
разные знаки, что и определяет режим работы ТП.
127
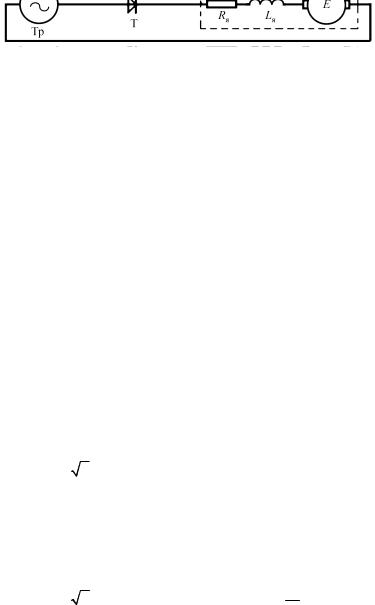
Рис. 4.33. Однофазная схема управления двигателем
Выпрямительным режимом работы ТП называется ре-
жим, при котором направления проводимости тиристора и Е противоположны и поэтому Е сама не может вызвать протекание тока в цепи ТП (направления ЭДС и падение напряжения на тиристоре совпадают).
Инверторным называется режим, при котором направление проводимости вентиля и Е совпадают, и эта ЭДС сама может вызвать протекание тока в цепи ТП, если тиристор Т открыт.
Поскольку величина падения напряжения в тиристоре Uв = const очень мала (Uв 0,5...0,8 В), то в схеме замеще-
ния его можно заменить некоторой эквивалентной ЭДС, равной падению напряжения Uв. Это падение напряжения всегда будет направлено против тока, т.е. против направления проводимости вентиля. Запишем уравнение электрического равновесия цепи:
2U |
|
sin(ωt +α) =U |
|
± E + R i + L |
di |
, |
(4.45) |
|
|
|
|||||
|
2 |
|
в |
я я dt |
|
|
|
в котором для выпрямительного режима E берется со знаком «+», а для инверторного – со знаком «–».
Преобразуем (4.45), отнеся все ЭДС в левую часть уравнения:
2U2 sin(ωt +α) −Uв E = Rяi + Lя ddti ,
128
2U |
|
|
sin(ωt +α) − |
U |
в |
± E |
= R i + L |
di |
. |
(4.46) |
2 |
|
|
|
|
||||||
|
|
|
|
я я |
dt |
|
|
|||
|
|
|
|
|
2U2 |
|
|
|
||
Обозначим
а = Uв ± Е , |
(4.47) |
2U2 |
|
где а – коэффициент отношения напряжений, показывает, как относится сумма постоянных напряжений в цепи ТП к амплитудному значению напряжения переменного тока.
Теперь уравнение (4.46) можно представить через а:
2U |
|
[sin(ωt +α) −а] = R i + L |
di |
. |
(4.48) |
|
|
||||
|
2 |
я я dt |
|
||
В однофазном ТП всегда наблюдается режим прерывистых токов, так как тиристор Т пропускает лишь один полупериод тока.
Рассмотрим управление тиристором в выпрямительном и инверторном режимах.
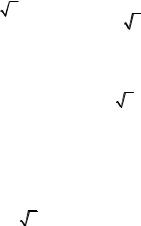
Открытие вентиля в выпрямительном режиме произойдет в момент времени, когда мгновенное значение напряжения на аноде тиристора будет превышать сумму ЭДС в катодной цепи (Uв + Е). Из рис. 4.34 видно, что работа вентиля возможна между точками а и б (до т. а и после т. б вентиль открыть нельзя, даже подавая отпирающий импульс, так как в эти моменты времени анод вентиля отрицателен). В соответствии с найденными точками определяются углы отпирания αmin
иαmax, регулировать которые можно при помощи СИФУ. Точки а и б – это точки, в пределах которых теоретически воз-
можно открывание вентиля.
При а > 1 анод вентиля будет всегда отрицательным,
иусловия для отпирания тиристора не будут созданы, тогда
для выпрямительного режима однофазного УВП диапазон изменения коэффициента а = 0...1.
129
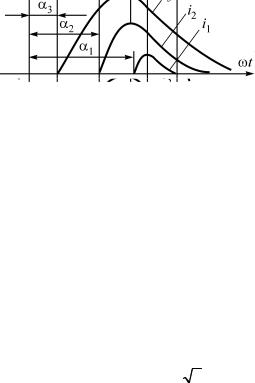
Рис. 4.34. Условия отпирания тиристора в выпрямительном режиме
Значения углов α определим из уравнения электрического равновесия (4.48) для т. а в момент открывания вентиля, т.е. при t = 0 из-за индуктивности катодной нагрузки ти-
ристора i |
= 0 и |
di |
= 0, поэтому |
2U2 (sin αmin −а) = 0; |
|
|
dt |
|
|
sin αmin = а; |
или |
|
|
|
|
|
|
αmin = arcsin а. |
(4.49) |
Значение αmax определяется из условий симметрии отпирания и закрытия тиристора при синусоидальном U2:
αmax = π−αmin = π−arcsin а. |
(4.50) |
Возможный диапазон изменения углов отпирания вен-
тиля
D = αmax −αmin = π−2arcsin а. |
(4.51) |
130