

книги / Теория электропривода.-1
.pdfПодставляя в (5.15) выражение приведенного к статору тока ротора из (5.13), получим уравнение статической механической характеристики:
M = |
|
3 |
U 2 |
r′ |
|
|
|
|
||
|
|
|
1 |
2 |
|
|
. |
(5.16) |
||
|
|
|
|
r2′ |
|
2 |
|
|||
|
ω s r + |
|
|
|
|
|||||
|
+ x2 |
|
|
|
||||||
|
|
|
||||||||
0 |
|
|
1 |
|
|
к |
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Анализ полученной нелинейной зависимости показывает, что она имеет точки экстремума. Приравняв к нулю про-
изводную ddMs , после несложных преобразований получим уравнение критических скольжений:
sк = ± |
r2′ |
, |
(5.17) |
||
r2 |
+ x2 |
||||
|
|
|
|||
|
1 |
к |
|
|
|
где знак «+» соответствует двигательному режиму, а «–» – генераторному режиму с отдачей энергии в сеть.
Значения моментов, соответствующих критическим скольжениям, также называют критическими и определяют подставляя в (5.16) уравнение критических скольжений (5.17):
Mк = |
|
|
|
3 U12 |
|
|
. |
(5.18) |
|
|
ω r ± |
r2 |
+ x2 |
|
|||||
2 |
|
|
|||||||
|
|
0 |
|
1 |
1 |
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
Из полученного уравнения следует, что критический момент в генераторном режиме будет отрицательным (тормозным) и значительно бóльшим, чем в двигательном режиме.
Определим отношение критических моментов генераторного Мк.г и двигательного Мк.д режимов работы:
М |
|
|
r |
+ |
r2 |
+ x2 |
|
1+а s |
|
|
к.г |
= |
1 |
|
1 |
к |
= − |
к , |
(5.19) |
|
r − r2 |
+ x2 |
|||||||
Мк.д |
|
|
1−а sк |
|
|||||
|
|
|
1 |
|
1 |
к |
|
|
|
151

где а s |
= |
r1 |
|
r2′ |
, а = |
r1 |
. |
|
к |
|
r2′ |
|
r2 |
+ x2 |
|
r2′ |
|
|
|
|
|
1 |
к |
|
|
|
Разделив уравнение (5.16) на (5.18), с учетом уравнения критического скольжения после несложных преобразований получим уравнение механических характеристик (уравнение Клосса):
М = |
2 Мк (1+ а sк ) |
. |
(5.20) |
|||||
|
||||||||
|
|
s |
|
s |
а s |
|
||
|
|
|
+ |
к |
+ 2 |
|
||
|
|
|
|
|
||||
|
|
sк |
|
s |
к |
|
||
|
|
|
|
|
|
|||
Двигатели средней и большой мощности имеют малое активное сопротивление статорной обмотки r1, поэтому коэффициентом a можно пренебречь, и из (5.20) получим уп-
рощенную формулу Клосса:
М = |
2 Мк |
. |
(5.21) |
||
|
|||||
|
s |
s |
|
||
|
к |
+ |
|
|
|
|
|
s |
|
||
|
s |
|
|||
|
|
|
к |
|
|
На рис. 5.3 приведена статическая механическая характеристика асинхронного двигателя, соответствующая урав-
нениям (5.18) и (5.20).
Рис. 5.3. Статическая механическая характеристики АД
152

Вкаталожных данных значения сопротивлений статора
иротора часто не приводятся, поэтому для двигателей сред-
ней и большой мощности Мк и sк можно определить через перегрузочную способность двигателя λ:
Мк = Мн λ, sк = sн (λ± (λ2 −1)). |
(5.22) |
Рабочим участком механической характеристики АД является участок характеристики с отрицательной жесткостью, т.е. участок с изменением скольжения в пределах изменений между критическими значениями. При s > sк.д работа АД становится неустойчивой в двигательном режиме, как было показано в гл. 2. Увеличение статического момента выше Мк.д вызывает остановку двигателя.
Если ротор двигателя вращать против поля (ω < 0, s > 1), двигатель переходит в тормозной режим противовключения. В этом режиме на естественной характеристике двигателя поток снижен, cosϕ2 весьма мал, поэтому двигатель развивает небольшие значения тормозного момента, потребляя из сети в основном реактивный ток, значительно превышающий номинальный. Поэтому режим противовключения на естественной характеристике двигателя на практике не используется.
Область ω > ω0 (s < 0) соответствует генераторному режиму работы параллельно с сетью. При ω0 < ω < ωк.г подводимая к двигателю механическая энергия частично теряется в двигателе в виде теплоты, а в основном отдается в сеть. Однако при дальнейшем возрастании скорости и соответствующем увеличении частоты тока ротора происходит постепенное уменьшение коэффициента мощности двигателя, который при s = sк.г становится равным нулю. При скорости ωкг, соответствующей sк.г, отдаваемая в сеть активная мощность равна нулю, т.е. вся подведенная к двигателю механическая энергия теряется в виде теплоты в двигателе. Поэтому при ω0 < ω < ωк.г имеет место режим рекуперативного торможе-
153
ния, при ω = ωгр наступает режим динамического торможения, а при ω > ωк.г двигатель начинает потреблять энергию из сети, как и при режиме противовключения.
Максимальное значение момента двигателя в двигательном режиме определяет его перегрузочную способность. При этом необходимо иметь в виду, что Мк зависит от квадрата приложенного напряжения U1, вследствие чего асинхронный двигатель весьма чувствителен к колебаниям напряжения сети. В каталожных данных для асинхронных двигателей указывается перегрузочная способность двигателя при номи-
нальном напряжении λ = Мк . При определении момента до-
Мн
пустимой перегрузки следует учитывать возможное снижение напряжения сети на 10 %:
|
|
U |
1 |
2 |
|
Мдоп = |
|
|
λ Мн = 0,8 λ Мн. |
(5.23) |
|
|
|
|
|||
U1н |
|
||||
При значениях |
пусковых моментов двигателя |
Мп = |
|||
= (0,5…1,5)Мн пусковые токи статора и ротора могут быть в 5–10 раз больше номинального значения, что значительно ограничивает допустимое число пусков двигателя в час.
Расчет механических характеристик АД можно проводить в следующем порядке:
1. На основании паспортных данных двигателя определяются: синхронная скорость ω0; критическое скольжение sк и критический момент Мк; скорость ωн и момент Мн в номинальном режиме работы; пусковой момент Мп из паспортных данных двигателя по коэффициенту кратности пускового
момента kп = Мп .
Мн
2. При построении искусственных механических характеристик расчет критических скольжений sк.и проводят с уче-
154
том добавочного сопротивления в цепи обмотки ротора rд по уравнению (5.17).
Если есть построенная естественная механическая характеристика, то построение искусственных характеристик можно упростить, с учетом, что при λ = const (т.е. для одного
и того же момента) |
sи |
= |
sк.и |
= |
r2′ +rд′ |
. |
|
|
|
||||
|
s s |
|
r′ |
|||
|
|
|
к |
2 |
|
|
3. Если определения координат основных точек механической характеристики недостаточно, необходимые координаты характеристик для двигателей мощностью до 100 кВт рассчитывают по уточненной формуле Клосса (5.20), а для двигателей средней и большой мощности используется упрощенная формула (5.21).
Для построения электромеханических характеристик не всегда удается использовать формулу (5.13) ввиду отсутствия данных о сопротивлениях обмоток двигателя. В связи с этим уравнение для построения электромеханической характеристики из механической можно получить из соотношения (5.15) для текущего и номинального режимов:
I′ |
= |
M ω0 s |
, |
I′ |
= |
Mн ω0 sн |
, |
(5.24) |
|
|
|||||||
2 |
|
3 r2′ |
2н |
|
3 r2′ |
|
||
|
|
|
|
|
||||
откуда можно выразить приведенное значение тока ротора, исключив сопротивление ротора:
I′ |
= I′ |
|
|
M |
. |
(5.25) |
н |
|
|||||
2 |
2 |
|
Mн |
|
||
|
|
|
|
|
||
По полученному уравнению можно построить электромеханическую характеристику АД, приведенную на рис. 5.4, подставив в него уравнения механических характеристик по (5.20) или (5.21) и выразив критический момент через перегрузочную способность по (5.22).
Электромеханическая характеристика не симметрична относительно значения s = 0, так как в знаменателе уравне-
155
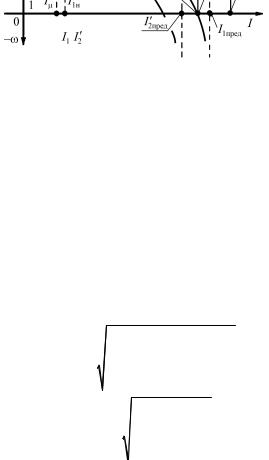
ния (5.13) слагаемое активной составляющей сопротивления в двигательном режиме и противовключения имеет разные значения с составляющей для генераторного режима (приведенное значение сопротивления ротора меняет знак при изменении знака скольжения).
Рис. 5.4. Статические электромеханические характеристики АД
Уравнения для построения характеристик I2′ = f(s) будут иметь вид
I2′ = I2′н |
|
|
2λ (1+ sк ) s |
|
|
, |
||||||||||
s |
|
|
|
s |
|
+ |
|
sк |
+ 2α s |
|
||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|||||||||
|
н |
|
|
|
|
|
|
s |
|
|
|
|
к |
|
||
|
|
|
sк |
|
|
|
|
|
|
|
|
|
(5.26) |
|||
|
|
|
|
|
|
|
2λ |
s |
|
|
|
|||||
I2′ = I2′н |
|
|
|
|
|
|
. |
|
|
|||||||
|
|
s |
|
s |
|
+ |
sк |
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
н |
|
|
|
s |
|
|
|
||||
|
|
|
|
|
|
|
sк |
|
|
|
|
|
|
|||
На синхронной скорости ω0, когда скольжение s = 0, ток ротора I2′ = 0. Ток статора при этом равен току намагничи-
156

вания (I1 = Iµ). При увеличении скольжения ток ротора растет, и при s = 1, когда двигатель остановлен, ток ротора равен пусковому I2п′, а при s → ∞ стремится к предельному значению:
I2′ |
пред = |
|
U1 |
. |
(5.27) |
|
r |
2 |
+ x2 |
||||
|
1 |
к |
|
|
||
Наличие максимума тока в кривой |
I2′ = f (s) в области |
|||||
генераторного режима объясняется тем, что в связи с изменением фазы тока статора и падения напряжения на сопротивлении r1 ЭДС двигателя и поток Ф в области малых скольжений продолжают возрастать и превышают значения, соответствующие идеальному холостому ходу. При больших отрицательных скольжениях определяющим становится падение напряжения на сопротивлении x1, здесь ЭДС и поток снижаются аналогично снижению ЭДС и потока в двигательном режиме работы. Этим обусловлены максимум ЭДС и потока в генераторном режиме и соответствующий ему макси-
мум тока ротора при r1 = −sr2′ :
I′ |
= U1 , |
(5.28) |
2max |
xк |
|
|
I2′пред. Скольжение |
|
после которого ток ротора снижается до |
||
при I2′ = I2′max называется граничным (по абсолютному значению оно больше критического |sгр| > |sк.г|).
Ток статора определяется по (5.14), на ЭМХ показан условной суммой намагничивающего тока и тока ротора. Поскольку в каталогах АД даются неполные данные по схемам замещения, расчет I1 и Iµ может быть выполнен по формулам проф. В.А. Шубенко:
I |
|
= I |
|
sin ϕ |
н |
− |
sн |
cosϕ |
. |
(5.29) |
|
||||||||||
|
1н |
|
|
|
sк |
н |
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
157 |
Активная составляющая тока ротора при увеличении скольжения уменьшается, так как уменьшается cosφ2. Поскольку момент двигателя создается электромагнитной мощностью, поступающей от статора, из уравнения (5.15) можно показать с учетом Т-образной схемы замещения:
|
3 |
|
|
|
|
Е2′ |
|
|
|
|
|
|
r2′ |
|
|
||
М = |
Е2′ |
|
|
|
|
|
|
|
|
|
s |
|
= |
||||
ω0 |
|
|
r2′ |
|
2 |
|
|
|
|
|
2 |
|
|||||
|
|
|
|
|
|
|
r2′ |
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
+ x′2 |
|
|
+ x′2 |
||||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2 |
|
|
s |
|
|
2 |
|
|||
|
|
|
|
|
s |
|
|
|
|
|
|
|
|||||
|
|
= |
3 Е2′ I2′ cos ϕ2 |
. |
|
|
|
|
(5.30) |
||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
ω0 |
|
|
|
|
|
|
|
|
|
|
В соответствии с (5.30) при увеличении скольжения момент двигателя снижается, жесткость механической характеристики меняет знак и ее участок соответствует неустойчивому режиму работы.
5.3. Искусственные механические характеристики АД
Используя уравнение механической характеристики (5.16) в общем виде M = f(U1, r1, x1, r2, x2, f1), можно выделить способы получения искусственных характеристик:
–изменением напряжения, подводимого к обмотке ста-
тора;
–введением в цепь статора добавочных сопротивлений;
–введением в цепь ротора добавочных сопротивлений;
–изменением частоты питающей сети.
5.3.1. Механические характеристики при изменении напряжения
Поскольку величина потока асинхронного двигателя пропорциональна напряжению питания U1, величина ЭДС ротора и, следовательно, ток ротора I2 тоже пропорциональны
158
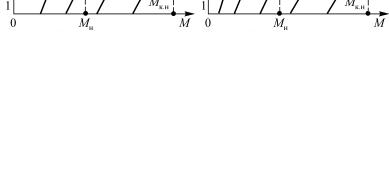
напряжению статора, а в соответствии с уравнением (5.16) момент асинхронного двигателя пропорционален квадрату напряжения. По уравнениям (5.16) и (5.18) видно, что снижение напряжения статора приводит к значительному снижению как момента на валу, так и критического момента двигателя, и тем самым снижается жесткость механических характеристик. Семейство искусственных механических характеристик при снижении напряжения статора приведено на рис. 5.5.
а |
б |
Рис. 5.5. Механические характеристики АД при изменении напряжения на статоре: а – с постоянным моментом нагрузки; б – с вентиляторной характеристикой механизма
Из приведенных выше уравнений (5.7) и (5.17) следует, что изменение напряжения питающей сети не сказывается на величине скорости идеального холостого хода ω0 и значении критического скольжения sк.
По уравнению Клосса любые два значения моментов двигателя на искусственных характеристиках при ω = const, соответствующих напряжениям U1 и U2, будут определяться соотношениями
М |
1 |
= |
М |
к1 |
= |
U 2 |
|
|
|
|
1 . |
(5.31) |
|||||
М2 |
Мк2 |
|||||||
|
|
U22 |
|
|||||
|
|
|
|
|
|
|
159 |
|
Если момент сопротивления на валу двигателя остается постоянным, и Мс = Мн, как показано на рис. 5.5, а, то при снижении напряжения от номинального до величины U2 двигатель будет работать со скольжением s2. При этом мощность скольжения (мощность потерь в роторе пропорциональна площади 0асs2) Ps = Mc · ω0 · s2 и возрастает по сравнению с номинальным режимом почти втрое.
Дальнейшее снижение напряжения на статоре может вызвать аварийный режим работы – «опрокидывание двигателя», когда критический момент оказывается меньше момента сопротивления механизма.
При вентиляторном моменте сопротивления (рис. 5.5, б) снижение напряжения от номинального до значения U2, если двигатель работал с номинальным моментом, приводит к существенному росту мощности потерь скольжения, хотя и меньше примерно в полтора раза, чем в предыдущем случае.
Таким образом, регулирование скорости вращения асинхронного двигателя изменением напряжения питания связано с непропорциональным увеличением потерь мощности в роторе на скольжение и перегревом ротора. Поэтому при данном способе регулирования нужно увеличить установленную мощность двигателя или использовать двигатель с повышенным значением критического скольжения.
Преднамеренное снижение напряжения, подаваемого на статорную обмотку асинхронного двигателя, используется практически не столько для регулирования скорости асинхронного двигателя, сколько, как правило, для обеспечения плавного пуска.
При этом пуск и работа асинхронного двигателя недопустимы со снижением напряжения питания более чем на 30 %, так как момент двигателя при этом снижается в два раза и возможен режим «опрокидывания».
Если увеличивать U1 при f = const, это приводит к быстрому увеличению тока намагничивания. Поскольку у двига-
160