

756
.pdfА.С.Пикалов
Однопутный участок :
1-якриваяпроектныйR=975м,фактическийR=939м,отклонение3%,проектная L1 = 40 м, фактическая L1 = 46 м, проектная L2 = 40 м, фактическая L1 = 51 м, проектная длина круговой кривой К = 152,34 м, фактическая длина круговой кривой К = 127 м.
2-якриваяпроектныйR=1100м,фактическийR=997м,отклонение9%,проектная L1 = 40 м, фактическая L1 = 48 м, проектная L2 = 40 м, фактическая L1 = 47 м, проектная длина круговой кривой К = 94,56 м, фактическая длина круговой кривой К = 68 м.
Двухпутный участок :
1-якриваяпроектныйR=670м,фактическийR=678м,отклонение1%,проектная L1 = 90 м, фактическая L1 = 93 м, проектная L2 = 90 м, фактическая L1 = 88 м, проектная длина круговой кривой К = 181,55 м, фактическая длина круговой кривой К = 185 м.
2-якриваяпроектныйR=633м,фактическийR=637м,отклонение0%,проектная L1 = 100 м, фактическая L1 = 104 м, проектная L2 = 100 м, фактическая L1 = 102 м, проектная длина круговой кривой К = 152 м, фактическая длина круговой кривой
К = 68 м.
Изприведенныхданныхвидно,чтоприпостановкепутивпроектноеположениепо данным ОАО «Сибжелдорпроект» и данным проекта сглаживания АС «Навигатор» расхождения превышают допуски. Причиной расхождений являются различные алгоритмы расчета геометрических параметров пути.
Как видно из результатов проверки путеобследовательской станцией ЦНИИ-4 соответствиянатурногоположенияпутипроектному,неточнаяпостановкавпроектное положение повлекла за собой отклонения в параметрах кривых и несоответствие параметров требованиям нормативной документации [2] при приемке пути в эксплуатацию. Данная проблема также имеет правовые и юридические аспекты, связанные с утверждением изменений проектных решений после (до) «сглаживания» по отноше- ниюкпроектуутвержденногоГлавгосэкспертизойиликакие-либодругиеприемлемые решения для устранения неоднозначности при приемке пути в эксплуатацию.
Библиографический список
1.Положение о проведении реконструкции (модернизации) железнодорожного пути, утв. вицепрезидентомОАО«РЖД»В.Б.Воробьевым22.05.2009.
2.Техническиеусловиянаработыпоремонтуипланово-предупредительнойвыправкепути(утв.МПС
РФ30.09.2003№ЦПТ-53).
A.S.Pickalov.AccuracyAssessmentofArrangingtheTrackintotheDesignPosition underTrackReconstructionandOverhaul.
Thearticleconsiderstheexistingmethodsofarrangingthetrackintothedesignpositionunder variousoperatingconditions.Theresearchfocusesonthecomparativeanalysisofdeviationsfromthe trackgeometricparametersoftheprojectatvariousstages,andpresentsthefindingsontheaccuracy ofexistingmethods.
Key word: track reconstruction, track capital repair, coordinate system, spatial data, ballast cutting-out control system, track alignment control system, GIS technologies.
31
ВестникСГУПСа.Выпуск28
Иванова Лилия Ивановна — доцент кафедры «Путь и путевое хозяйство» Сибирского государственного университета путей сообщения,доцент.Родиласьв1942г.В1965г.окончилафакультетСЖД НИИЖТа,1968–1971гг.—аспирантНИИЖТа,преподаватель,ст. преподаватель кафедры, с 1990 г. доцент НИИЖТа, доцент, в 1994– 2010 гг.—зам.деканафакультетаСЖД.
Область научных интересов — бесстыковой путь. Автор более 45 научныхработ.
УДК 625.143.5
Д.В. ВЕЛИЧКО, Л.И. ИВАНОВА
СОДЕРЖАНИЕ ШИРИНЫ КОЛЕИ ПРИ ЖЕЛЕЗОБЕТОННЫХ ШПАЛАХ
ВКРИВЫХ МАЛОГО РАДИУСА
Встатье рассматриваются способы регулировки ширины рельсовой колеи с помощью металлических пластин и методом фрезерования-сварки подкладки. Выполнено сравнение этих способов между собой и определены максимальные размеры регулировки ширины колеи.
Ключевые слова: железнодорожный путь, ширина рельсовой колеи, промежуточноерельсовоескрепление,рельс,подкладкаскрепления,текущеесодержаниепути.
Применение железобетонных шпал в кривых малого радиуса ограничено требованиямиуширениярельсовойколеи.ШиринаколеивпрямыхикривыхR=350миболее —
1520 мм, в кривых R = 349…300 м — 1530 мм, в кривых R = 299 м и менее — 1535 мм.
Длядальнейшегопродвиженияэтихсовременныхивысоконадежныхконструкций вкривыемалогорадиусаразработаныспециальныежелезобетонныешпалысизмененными размерами подрельсовых площадок — под указанные размеры ширины колеи. Однако объемы таких шпал недостаточны, применение таких специальных конструкцийтребуетточностиихукладкиприкапитальномремонтелиботрудоемкихопераций по точечной замене стандартных шпал на эти специальные.
Для текущего содержания пути на железобетонных шпалах в кривых возникает необходимостьвыполненияработпорегулировкеширинырельсовойколеи,чтовсилу конструктивных особенностей шпал осуществить невозможно без дополнительных методов и приспособлений.
Сиспользованиемнижеприведеннойметодики анализаразмерных цепейрассмотрим два метода регулировки ширины колеи.
Ширинарельсовойколеивомногомопределяетразбросразмеровэлементовскреплений, рельса и шпалы, из которых собирается рельсошпальная решетка. Наиболее совершенным методом оценки точности сборки путевой решетки является анализ размерных цепей [1].
Номинальный размер ширины колеи определяется из выражения
i 10 |
|
Ш B1 B2 B11 Ci Bi, |
(1) |
i 3 |
|
гдеB1 —расстояниемеждунаружнымикромкамиуглубленийвшпалеподподкладками, мм; B2, B11 — отклонения головки рельса от вертикали в расчетном уровне за счет подуклонки, мм; B10 — расстояния от наружной кромки углубления в шпале под подкладкой до оси закладного болта, мм; B9 — расстояния от оси закладного болта до
32
Д.В. Величко, Л.И. Иванова
упорной грани ее реборды, мм; B8 — расстояния от оси рельса до упорной грани наружной реборды подкладки, мм; B7 — размеры половины ширины головки рельса,
замеренной на уровне измерения ширины колеи, мм. |
|
B2(B11)=AC=HsinM; |
(2) |
H = h – h1 + h2 + h3 + h4 – h5 – AD; |
(3) |
AD = (B3 + B4 + B5 + B6)tgM, |
(4) |
где h — высота рельса, мм; h1 — расстояние от верха головки рельса до расчетного уровня определения ширины рельсовой колеи, мм; h2 — толщина подрельсовой прокладки, мм; h3 — толщина подкладки, мм; h4 — толщина нашпальной прокладки, мм; h5 —размеруглублениявшпалевподрельсовойзоне,мм;M—подуклонкаподрельсо- вой зоны шпалы; B3 — расстояния от наружной кромки углубления в шпале под подкладкой до оси закладного болта, мм; B4 — расстояния от оси закладного болта до упорной грани ее реборды, мм; B5 — расстояния от оси рельса до упорной грани наружной реборды подкладки, мм; B6 — размеры половины ширины головки рельса, замеренной на уровне измерения ширины колеи, мм.
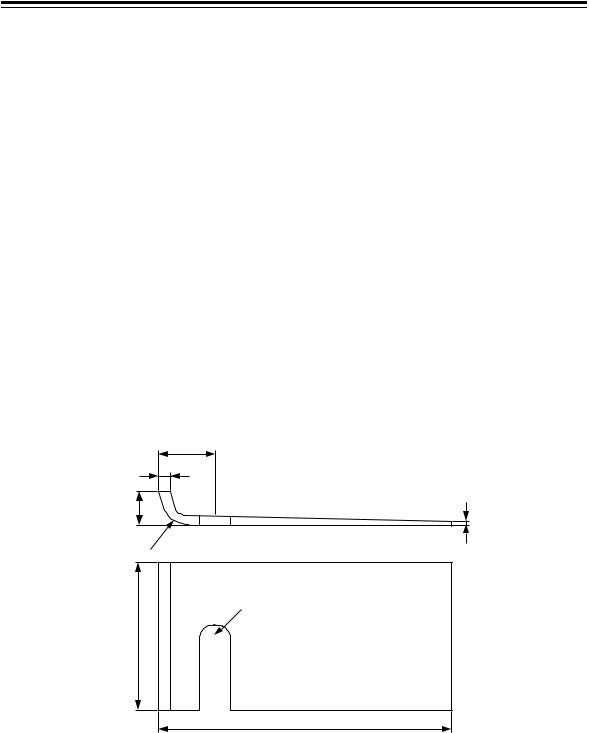
1. Метод использования металлических пластин.
На Западно-Сибирской железной дороге для регулировки ширины колеи на желе- зобетонныхшпалахискрепленияхКБ-65какодинизвариантовиспользуютсяметалли- ческиепластины(рис.1),которыезаводятсяподнашпальнуюпрокладкусторцашпалы после ослабления клеммных болтов.
|
|
|
47 |
|
|
|
5 |
25 |
|
|
2 |
|
R |
1 |
7 |
|
|
||
|
|
|
|
|
|
|
6 |
|
|
|
1 |
145 |
|
|
R |
|
|
|
|
|
|
|
340 |
Рис.1.Металлическаяпластинадлярегулированияшириныколеи |
|||
Эффект изменения ширины рельсовой колеи при применении металлических пластинскладываетсяиздвухсоставляющих:
—за счет толщины реборды пластины (с варьированием до 5 мм);
—за счет изменения подуклонки рельса — М.
Если установить пластинуснаружнойстороны, то подуклонкаподрельсовой зоны шпалы М увеличится на величину подуклонки регулировочной пластины М, а при установке с внутренней стороны — уменьшится на эту же величину М.
33

ВестникСГУПСа.Выпуск28
Максимальнаятолщинарегулировочнойпрокладкинавыкружкешпалысоставляет 5 мм, а на противоположном конце, который заводится под подкладку и нашпальную прокладку, — 2 мм.
Подуклонка (тангенс угла наклона регулировочной пластины под подкладкой) составит:
М = h/L, |
(5) |
гдеh—толщинаметаллическойпластины,мм; L—длинаопорнойчастиподкладки КБ, мм.
По формулам (1)–(4), c использованием значения размеров элементов скрепления КБ-65[1],выполненырасчетышириныколеисприменениемметаллическойпластины при размещении еес наружной и внутренней стороны рельса, а такжепри размещении двух металлических пластин с наружных, а затем и с внутренних сторон (таблица).
Изменение ширины колеи при использовании металлических пластин
Место установки |
Кол-во |
Изменение ширины колеи |
Толщина |
Суммарное |
|
от изменения подуклонки |
пластин h, |
изменение ширины |
|||
пластины |
пластин, шт. |
||||
|
|
SM, мм |
мм |
колеи S, мм |
|
Наружная сторона |
1 |
–2,3 |
–5 |
–7,3 |
|
2 |
–4,5 |
–10 |
–14,5 |
||
|
|||||
Внутренняя сторона |
1 |
2,4 |
5 |
7,4 |
|
2 |
4,7 |
10 |
14,7 |
||
|
Следовательно, при применении металлических пластин ширина рельсовой колеи может варьироваться в пределах порядка ±15 мм.
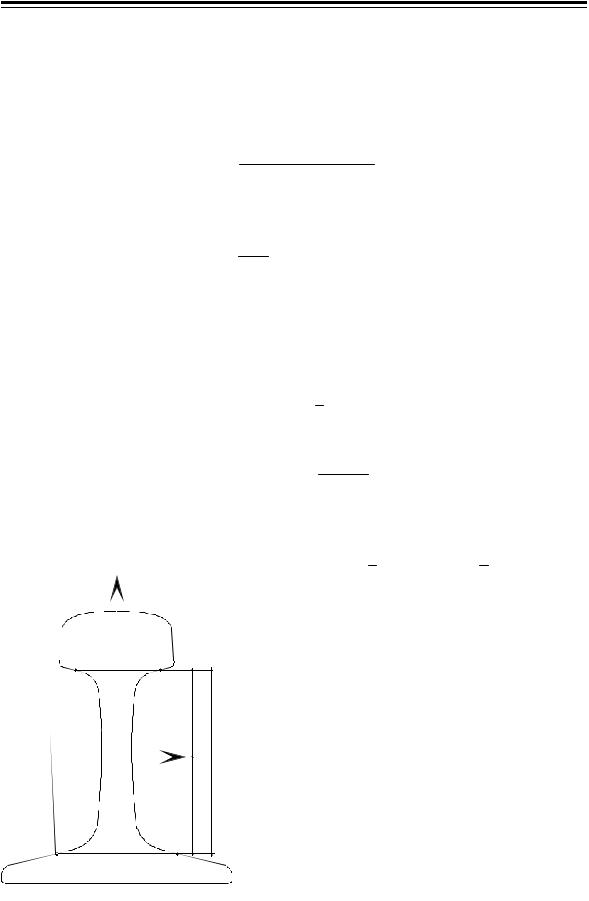
2.Метод фрезерования-сваркиреборд подкладки.
Крометого,регулировкушириныколеинажелезобетонныхшпалахвкривыхмалого радиусаможноосуществлятьспомощьюизмененияразмеровребордподкладки(рис.2). Когда на одной реборде подкладки с внутренней стороны фрезерованием снимается слой металла, анадругой ребордеподкладки свнутреннейсторонынаваривается слой такойжетолщины.Дляплавногоотводаширинырельсовойколеитребуетсянесколько типоразмеровтаких специальных подкладок.Этот способ регулировки ширины колеи более надежный, но более трудоемкий и имеет менее широкие границы возможности устранения отступлений по шаблону.
Рис.2.Схемафрезерования-сваркиребордподкладки
Всилуконструктивныхразмеровжесткихклеммиребордметаллическойподкладки скрепления КБ-65, метод фрезерования-сварки позволяет регулировать ширинуколеи при изменении размеров реборд двух подкладок на величину порядка ±10 мм.
Такимобразом,регулировкашириныспомощьюметаллическихпластинпозволяет при достаточно небольшой трудоемкости быстро устранять отступления по шаблону. Прииспользованииоднойпластиныможнодобитьсяизмененияшириныколеипорядка ±7,4 мм, при использовании двух металлических пластин ширина рельсовой колеи может варьироваться в пределах порядка ±15 мм.
34

Д.В. Величко, Л.И. Иванова
Метод фрезерования-сварки более надежный, но более трудоемкий в изготовлении — имеет меньшие возможности регулировки ширины колеи. При использовании одной специальной металлической подкладки изменение ширины колеи составит порядка ±5 мм, при использовании двух специальных подкладок ±10 мм.
Библиографический список
1. ВеличкоД.В.Оценкакачестваизготовленияэлементовпромежуточныхрельсовыхскреплений// ВестникСибирского государственного университета путейсообщения. Новосибирск:Изд-во СГУПСа, 2004.Вып.8.С.75–82.
D.V. Velichko, L.I. Ivanova. Gauge Maintenance with Concrete sleepers in the Small
RadiusCurves.
Thearticleanalysestwowaysofadjustingthegauge:withmetalplatesandpadsworkedby cuttingandwelding.Thecomparisonofthesemethodsdeterminedthemaximumsizeofgauge adjustment.
Key words: railway track, gauge, rail fastening, rails, pad, track maintenance.
35
ВестникСГУПСа.Выпуск28
СуровинПавелГеннадьевич—кандидаттехническихнаук.В 1999 г. окончил СГУПС, в 2004 г. защитил диссертацию на тему «Расчетная оценка остаточного ресурса железнодорожных рельсов с поперечными трещинами». Основные работы посвящены исследованию напряженного состояния рельсов с дефектами, а такжеособенностямразвитияусталостныхтрещин.Автор18работ.
Е-mail: surovin@stu.ru
УДК 625.1.03
П.Г.СУРОВИН
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ПОПЕРЕЧНЫХ ПЕРЕМЕЩЕНИЙ РЕЛЬСОВ
Предлагается методика измерения поперечных перемещений рельса. Перемещения определяются по измеренным значениям изгибающих моментов и численным интегрированием уравнения изогнутой оси рельса. Дается оценка погрешности.
Ключевыеслова:перемещениярельса,изгибающиймомент,погрешностивычислений.
Внастоящеевремявесьмаактуальнапроблемаизмеренияперемещенийрельсапод поездом. Зная перемещения, полученные экспериментально, можно оценить корректностьрасчетныхмоделейжелезнодорожногопути.Поизвестнымперемещениямможно вычислить усилия, передающиеся от колеса на рельс [1], что особенно важно при разработкеновыхконструкцийпутииподвижногосоставадляповышенныхскоростей движения. Кроме того, в 2006–2008 гг. в СГУПСе при исследовании износа рельсов измерялисьгоризонтальныеперемещениярельсов[2].Внастоящейработепредлагается метод измерения поперечных перемещений рельса и дается оценка погрешностей метода.
Прямое измерение перемещений рельса затруднительно. Основная причина этого —отсутствиенажелезнодорожномпутинеподвижныхточек,относительнокоторых следует проводить измерения. Для косвенных измерений в качестве расчетной схемы рельса примем бесконечную балку на сплошном упругом основании.
Запишем известное уравнение изогнутой оси балки:
|
M |
|
d2v |
, |
|
|
|
(1) |
|
|
EJ |
dx2 |
|
|
|
||||
|
|
|
|
|
|
|
|||
где M — изгибающий момент; E — модуль упругости материала балки; J — момент |
|||||||||
инерции поперечного сечения стержня; v — перемещение сечения. |
|
||||||||
Запишем(1)вконечныхразностях: |
|
|
|
|
|
|
|
|
|
vi 1 2vi |
vi 1 |
|
x2M |
i |
. |
(2) |
|||
EJ |
|
||||||||
|
|
|
|
|
|
|
|
|
|
Измеряяизгибающиемоментывnсечениях,срасстояниеммеждуними x,можно записатьсистемууравненийтипа(2),вкоторойnуравненийиn+2неизвестных.Чтобы
36
П.Г.Суровин
получитьзамкнутуюсистемууравнений,запишемграничныеусловия.Дляэтогонеобходимознатьперемещениядвухточек.Возьмемвкачествеэтихточектакие,вкоторых перемещения на 2–3 порядка меньше, чем наибольший прогиб рельса под нагрузкой. Такимималымиперемещениямиможнопренебречьисчитатьихравныминулю.Тогда граничные условия можно представить в виде:
v0 = 0; vn + 1 = 0.
Расстояние до граничных точек оценим, используя фундаментальное решение задачи об изгибе бесконечной балки на упругом основании, нагруженной силой P в
началекоординат: |
|
|
|
|
|
|
|
|
v(x) |
P |
|
e x cos x sin x , |
(3) |
||||
3 |
|
|||||||
|
8 EJ |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
4 |
U |
, |
|
|||
|
|
|
|
|||||
|
|
|
|
|
4EJ |
|
||
гдеU—модульупругостиоснованияжелезнодорожногопути;P—сила,приложенная крельсу.
Если x = 5, то e– x = 0,00674. При этом перемещение граничной точки составит 0,67 % от перемещения точки приложения силы. Поскольку для железнодорожного пути0,5< <1,тоизгибающиемоментыимеетсмыслизмерятьнедальше5мотколеса.
Еслипренебрегатьвлияниемсоседнихтележекподвижногосостава,тонеобходимо измерять изгибающие моменты на участке длиной около 12 м(база тележки грузового вагона 1,85 м, плюс в каждую сторону по 5 м).
Как и при решении любого дифференциального уравнения методом конечных разностей, при уменьшении шага x увеличивается точность решения. Если принятьx =0,1м(онеобходимомчислеточек—ниже),топотребуетсяизмеритьизгибающие моментыв121точкерельса,апотомрешитьсистемууравнений(2)121-гопорядка.При использовании ЭВМ решение такой системы уравнений не представляет трудностей, но провести необходимое количество измерений весьма затруднительно.
Если предположить, что путь однородный, т.е. жесткости рельса и основания постоянны по длине, то (3) описывает не только деформированный вид, но и линию влияния перемещений. Это дает возможность проводить измерения в одномсечении с малым интервалом времени t, т.е. записать осциллограмму изгибающих моментов. Тогда x = V t (V — скорость поезда), и (2) можно переписать в матричной форме:
Av = B, |
(4) |
|
2 |
1 |
0 ... |
0 |
0 |
|
|
1 |
2 |
1 ... |
0 |
0 |
|
A |
0 |
1 |
2 ... |
0 |
0 |
|
... ... ... ... ... ... |
||||||
|
||||||
|
0 |
0 |
0 ... |
2 |
1 |
|
|
0 |
0 |
0 ... |
1 |
2 |
|
|
v1 |
|
|
|
|
M1 |
|
|
v2 |
|
|
|
|
M2 |
|
, v |
v3 |
, |
B |
t2V2 |
|
M3 |
. |
v4 |
EJ |
|
M4 |
||||
|
|
|
|
(5) |
|||
|
... |
|
|
|
|
... |
|
|
|
|
|
|
|
||
|
vn |
|
|
|
|
Mn |
|
Прирешениисистемуравненийбольшогопорядкасуществененвопрособустойчивости вычислений. Как известно, устойчивость системы уравнений определяется матрицей коэффициентов [3]. Однако в данном случае матрица коэффициентов систе-
37
ВестникСГУПСа.Выпуск28
мы (5) известна точно, поэтому источником погрешности перемещений может быть только погрешность правой части. Оценим ее.
Введем малые относительные погрешности измерения интервала времени t, скорости движения поезда V и изгибающего момента M. При этом правая часть также получитпогрешность B:
B 1 B t2 1 t 2V2 1 V 2 M 1 M .
EJ
Далее будет показано, что погрешность жесткости рельса не влияет на результат. Учитывая, что при <<1 имеет место соотношение (1 + )2 1 + 2 , получим
B 1 B t2V2 M 1 2 t 1 2 V 1 M .
EJ
Раскроем скобки, приведем подобные слагаемые и отбросим бесконечно малые высшихпорядков:
B 2 t 2 V M. |
(6) |
Оценим погрешность измерения скорости поезда. Если измерять время прохода поездом заданной базы l, то скорость можно найти из известного соотношения
Vl .
Внесем в это соотношение погрешности:
V 1 V l 1 l .1 t
Знак погрешности времени принят таким, чтобы получить неблагоприятное сочетание погрешностей. После преобразований получим
|
|
y |
тензодатчиков |
1 |
2 |
|
||
наклейки |
|
y |
|
|
1 |
места |
|
x |
|
a |
|
Возможные |
|
|
|
y |
|
|
|
2 |
|
3 |
4 |
Местанаклейкитензорезисторов
V 1 V l 1 l 1 t l 1 l t ,
V l t.
С учетом (6) получим |
|
B 4 t 2 l M. |
(7) |
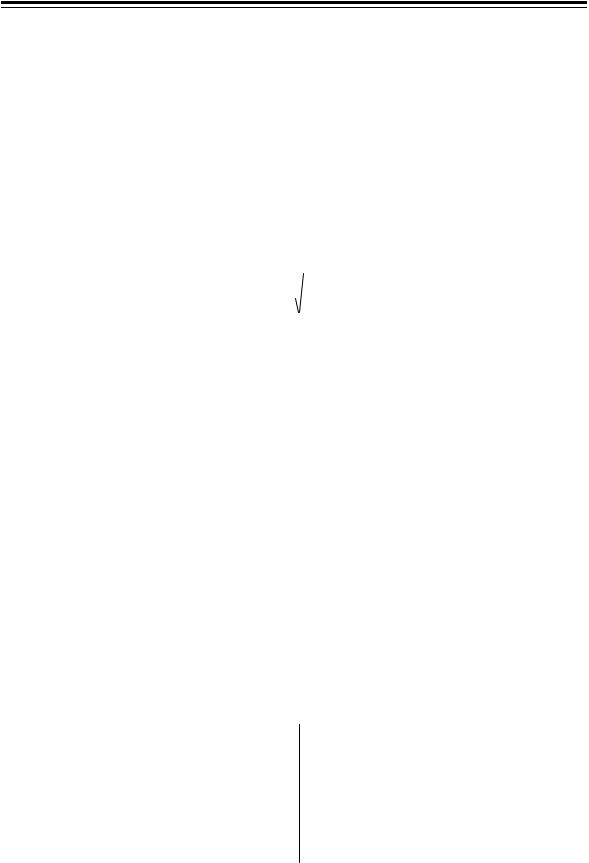
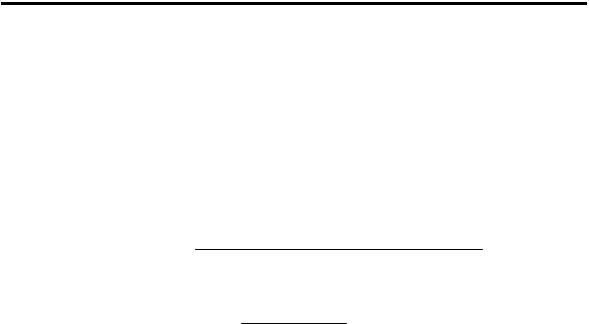
Рассмотримтеперьпогрешностиизмеренияизгибающего момента в сечении.
Наклеим на рельс в одном сечении тензорезисторывпродольномнаправлениивточках 1,2,3и4, как показано на рисунке. При нагружении рельса эти тензодатчики зафиксируют деформации в точках 1, 2, 3 и 4:
|
|
|
M |
y , |
|
|
|
|
|
M |
y |
, |
|
|
|
|
|
||||||||
1 |
2 |
|
EJ 1 |
|
3 |
|
4 |
|
EJ 3 |
|
||
гдеy1 иy2 —расстоянияотцентратяжестирельсадо точек,вкоторыхизмеряютсядеформации(см.рисунок).
Подеформациямнетрудновычислитьизгибающий момент в сечении:
38
П.Г.Суровин
M |
3 4 1 2 |
EJ, |
a y1 y2. |
(8) |
|
||||
|
2a |
|
|
|
Деформации 1, 2, 3 и 4 могут иметь некоторую погрешность измерения. Кроме того, погрешность может содержаться в координатах точек измерения. Это вызывает погрешность вычисленияизгибающего момента. Введемотносительныепогрешности измерения деформаций 1 = 2 = 3 = 4 = и наклеивания тензорезисторов a. Модуль упругости и момент инерции рельса также могут содержать погрешности, но при дальнейшей обработке результатов их произведение EJ окажется в знаменателе и не повлияет на окончательный результат. Подставим погрешности в (8). Получим
M 1 M 3 1 4 1 1 1 2 1 EJ. 2a 1 a
После преобразований получим
M 1 M 3 4 1 2 1 1 a EJ. 2a
Раскроем скобки и отбросим малые высших порядков. С учетом (8) получим относительнуюпогрешность M:
M |
M |
a. |
(9) |
|
|||
|
M |
|
|
Приведем некоторые числовые оценки.
Для рельса Р65 разность координат a = 120…130 мм, абсолютная погрешностьа = 0,5…1мм.Деформациимогутдостигатьвеличин =±5·10–4,аих погрешностьпо
данным [4, 5] — = 1 %. Тогда a |
a |
100 % |
|
1 |
100 % 0,83%, и M = 1,83 %. |
|
120 |
||||
|
a |
|
|||
Современнаяэлектроникапозволяетбезкаких-либотрудностейполучить t= 0,02 %, длина измерительной базы скорости движения поезда может быть получена с погрешностью l = 0,5 %.
Для погрешности правой части (6) получим
B = 4 · 0,02 % + 2 · 0,5 % + 1,83 % = 2,91 % 2,9 %.
Погрешность перемещений рельса, связанная с погрешностями измерений, составит ту же величину.
Оценимтеперь погрешности, связанные сзаменой дифференциального уравнения
(1) системой уравнений (4). Для этого выполним расчет с разным шагом x. При расчетах принято: силы P1 = 20 кН, Р2 = 25 кН, модуль упругости рельса Е = 2·108 кПа, моментинерциирельсаJ=3650м4,коэффициентпостелиоснованияU=25МПа.Длина участка 12 м. Решение системы можно получить, умножив матрицу А–1 на столбец правой части В. Элементы обратной матрицы можно записать в виде [3]:
Ai, |
1j |
|
i n 1 j |
|
при i j и |
Ai, |
1j |
|
j n 1 i |
|
при i j. |
(10) |
|
n 1 |
n 1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||
Результаты пробных расчетов приведены в таблице. Из таблицы видно, что при шаге конечноразностной сетки x = 0,05 м (количество уравнений 241) погрешность вычислений не превышает 1,5 %, что в сумме с погрешностью определения правой части (4) составит менее 4 %. Имея оценку необходимого шага x, при известной скорости можно получить шаг времени t и для разных скоростей движения применять разные величины t.
39

ВестникСГУПСа.Выпуск28
Погрешности вычисления перемещений
х, м |
Кол-во |
Точное значение |
Перемещение, найденное из |
Погрешность, % |
|
уравнений |
перемещения, мм |
конечных разностей, мм |
|||
|
|
||||
0,2 |
61 |
|
0,482 |
13,1 |
|
0,1 |
121 |
0,426 |
0,442 |
3,76 |
|
0,05 |
241 |
0,432 |
1,41 |
||
|
|||||
0,02 |
601 |
|
0,429 |
0,7 |
При решении системы (4) нет необходимости вычислять все неизвестные перемещения. Гораздо эффективнее другой путь. При измерениях изгибающих моментов следуетначатьзаписьданныхзаранее,за5мдопоезда.Полученнуюзаписьобработаем такимобразом:
—фрагмент записи длиной, равной количеству уравнений, умножим на среднюю строку матрицы A–1 по правилам умножения матриц. При этом получим число — перемещениесечения;
—сдвинемзаписьмоментовнаодиншагповремениисноваумножимнасреднюю строку матрицы A–1. Получим перемещение сечения в следующий момент времени.
Повторяя процедуру, получим запись перемещений. Этот процесс в обработке сигналов называется цифровой фильтрацией сигнала. Весовыми коэффициентами фильтра являются элементы матрицы A–1. При этом от матрицы A–1 требуется только средняя строка. Обозначим эту строку C. Элементы этой строки получаются при
подстановке i |
n 1 |
, |
n — нечетное (при четном n матрица не имеет средней строки). |
||||||||||||||||
|
|||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда(10)примутвид: |
|
|
|
|
|
|
|
|
n 1 j |
|
|
n 1 |
|
|
|||||
|
|
|
C |
j |
A 1 |
|
при |
j, |
|
||||||||||
|
|
|
|
|
|
2 |
|
||||||||||||
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
n |
1, j |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
j |
|
n 1 |
|
|
|
|
|||
|
|
|
C |
j |
A 1 |
|
при |
j. |
(11) |
||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
1, j 2 |
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||
Окончательно перемещение сечения можно получить в виде:
v CjBj.
j
Описаннаяметодикадаетвозможностьопределятьперемещениярельсовспогрешностью около 4 %, что следует признать удовлетворительным.
Библиографический список
1.СуровинП.Г.Экспериментальныйметодопределениясилвзаимодействияколесаирельса//Вестник СГУПСа.Новосибирск,2006.Вып.14.С.89–92.
2.КарпущенкоН.И.,КотоваИ.А.,ЛикратовЮ.Н.,СуровинП.Г.,АнтерейкинЕ.С.Взаимодействие колесирельсоввкривыхучастках//Путьипутевоехозяйство.2008.№6.С.2–5.
3.ФаддеевД.К.,ФаддееваВ.Н.Вычислительныеметодылинейнойалгебры.М.;Л.,1963.734с.
4.Экспериментальнаямеханика:В2кн.Кн.1/Пер.сангл.;Подред.А.Кобаяси.М.:Мир,1990.616 с.
5.ПригоровскийН.И.Методыисредстваопределенияполейдеформацийинапряжений:Справ.М.: Машиностроение,1983.248с.
P.G. Surovin. Experimental Method to Measure Rail Transverse Displacement.
Thearticlepresentsmethodsofmeasuringtherailtransversedisplacement.Measuredvaluesof bending moments and an equation numerical integration of a rail bent axle determine the rail displacements.Theresearchestimatescalculationerrors.
Keywords: raildisplacement, bendingmoment, calculationerrors.
40