

735
.pdf7.2.Предохранительные клапаны
спропорциональным управлением
В изображенной на ЗРЭ Якорь магнита рис. 7.4 конструкции регулируемая (настроечная)
пружина отсутствует, а требуемая сила передаётся на ЗРЭ непосредственно от якоря электромагнита.
На рис. 7.5 изображен КП непрямого дейст-
Рис. 7.4. Предохранительный клапан прямого действия вия с пропорциональным с пропорциональным управлением
управлением.
ЗРЭ пилота
ЗРЭ переливного клапана
Рис. 7.5. Предохранительный клапан непрямого действия с пропорциональным управлением: 1 – пилотный клапан с пропорциональным управлением; 2 – переливной клапан;
3 – страховочный клапан
Допустимое давление в контролируемой (напорной) линии А задают величиной напряжения на обмотке пилотного клапана 1. Если давление в линии А превысит заданный уровень, ЗРЭ клапана 1 отойдёт от седла и пропустит малый поток на слив в линию В. Возникшим при этом перепадом давления на ЗРЭ клапана 2 последний откроется и пропустит основной поток по кратчайшему пути А – В. Между корпусами переливного клапана 2 и пилота 1 может быть установлен страховочный клапан 3 в виде предохранительного клапана прямого действия с мускульной настройкой. В случае неисправности электрической системы управления и чрезмерного повышения давления клапан 3 откроет путь малому потоку на слив. В результате откроется переливной клапан 2.
7.3.Редукционные клапаны
спропорциональным управлением
При подаче напряжения на обмотку электромагнита (рис. 7.6) якорь 1 смещает втулку 2, сжимает пружину 3, открывает путь потоку в линию А. С ростом давления в линии А втулка 2 начинает смещаться в сторону магнита и при достижении настроечного давления разъединяет линии Р и А.
Такие клапаны применяют:
–для питания от одного насоса нескольких потребителей с разными давлениями;
–для пропорционального управления распределителями.
71
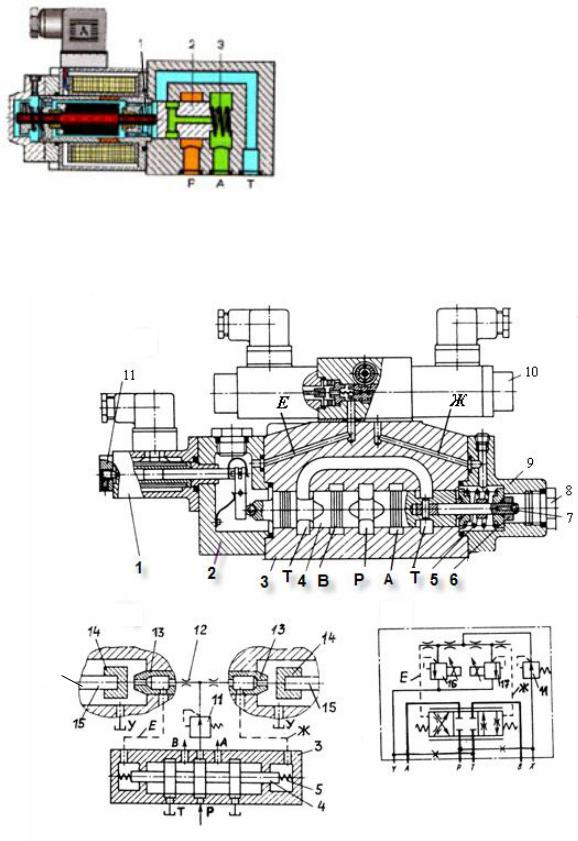
Рис. 7.6. Редукционный клапан
спропорциональным управлением:
1– якорь; 2 – втулка (золотник); 3 – пружина; Р – подводящая линия;
А– отводящая линия; Т – слив (дренаж)
а)
б)
16
7.4. Электрогидравлическое пропорциональное управление распределителями
Устройство и работу рассмотрим на примере распределителей типа РП10 и РП16. Оба они (рис. 7.7, а) двухступенчатые, состоят из блока управления (пилота) 10 и основной (силовой) ступени 3.
Блоки управления (пилоты) могут быть: 1) золотниковыми; 2) в виде устройств типа сопло-заслонка (элементы 13 и 14, рис. 7.7, б); 3) в виде подпорных клапанов 16 и 17 (рис. 7.7, в). Любой из этих типов пилота оснащен пропорциональными электромагнитами.
в)
Рис. 7.7. Распределитель с пропорциональным управлением:
а– устройство; б – схема устройства с потоком управления из напорной линии Р и пилотом
ввиде усилителей «сопло – заслонка» с пропорциональным управлением;
в– принципиальная схема с потоком управления из линии Х и пилотом в виде совокупности дросселей
иподпорных клапанов 16 и 17 с пропорциональным управлением
72
Силовая ступень распределителя с пропорциональным управлением (см. рис. 7.7 а) содержит корпус 3, крышку 9 с центрирующей пружиной 5, золотник 4 и крышку2, на которой установлен датчик 1 обратной связи по перемещению золотника 4. Для регулировки пружины 5 имеются гайка 6, винт 7 и пробка 8. Согласование нулевых положений золотника 4 и датчика1обратной связипроизводится вращением винта11.
Управляющий поток идёт от внешнего источника из линии Р через редукционный клапан 16 (см. рис. 7.7, б) или из линии X (см. рис. 7.7, в). Слив управляющего потока – по линии У (распределитель РП10) или объединён со сливом силового потока (линия Т, распределитель РП16).
При подаче напряжения на катушку правого электромагнита его якорь выдвигается, заслонка 14 приближается к соплу 13 (см. рис. 7.7 б), сопротивление истечению масла из этого сопла и давление в линии Ж увеличиваются. В результате золотник 4 смещается влево и соединяет силовые линии Р с А и В с Т. Если напряжение подано на катушку левого электромагнита, золотник 4 смещается вправо и соединяет линии Р с В и А с Т. Смещение золотника и расход через распределитель зависят от величины тока в катушке.
Пропорциональный |
Гидравлический |
Пропорциональный |
электромагнит |
пилот |
электромагнит |
|
Электронный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||||
|
блок |
|
|
|
Датчик |
|
Силовой распределитель |
|
|
|
||||
|
управления |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
обратной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
связи |
|
|
|
|
|
|
|
|
|
|
Электрический |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
входной сигнал |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
Рис. 7.8. Структурная схема распределителя с пропорциональным управлением |
|||||||||||||
|
|
|
|
|
|
|
На рис. 7.8 изображена |
|||||||
|
|
|
|
|
|
|
структурная схема распределите- |
|||||||
|
|
|
|
|
|
|
ля с пропорциональным электро- |
|||||||
|
|
|
|
|
|
|
гидравлическим управлением, на |
|||||||
|
|
|
|
|
|
|
рис. 7.9 – его принципиальная |
|||||||
|
|
|
|
|
|
|
схема, на рис. 7.10 – устройство. |
|||||||
|
|
|
|
|
|
|
Управление осуществляет элек- |
|||||||
|
|
|
|
|
|
|
тронный блок, на вход которого |
|||||||
|
|
|
|
|
|
|
подаётся электрический сигнал, |
|||||||
|
|
|
|
|
|
|
пропорциональный |
необходимо- |
||||||
|
|
|
|
|
|
|
му положению золотника. Элек- |
|||||||
|
|
|
|
|
|
|
тронный блок подаёт на один из |
|||||||
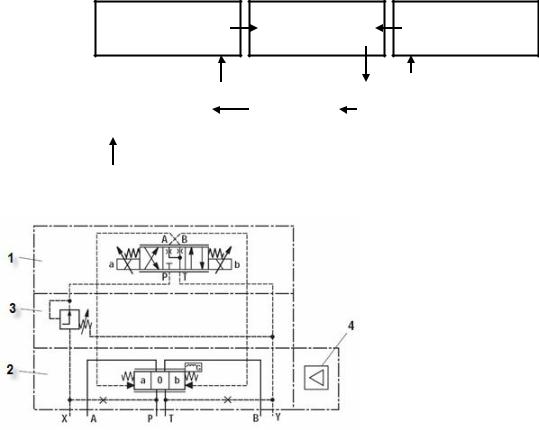
Рис. 7.9. Принципиальная схема распределителя |
пропорциональных |
|
электромаг- |
|||||||||||
нитов |
напряжение |
|
соответст- |
|||||||||||
с электрогидравлическим пропорциональным управлением |
|
|||||||||||||
(тип 4WRKE10, фирма Mannesmann Rexroth): |
вующей |
величины. |
|
Золотник |
||||||||||
1 – пилот с пропорциональным электрическим управлением; |
распределителя |
перемещается, |
||||||||||||
2 – силовой распределитель с пропорциональным |
датчик |
обратной |
связи выдаёт |
|||||||||||
гидравлическим управлением и индукционным датчиком |
электронному блоку сигнал, про- |
|||||||||||||
перемещения золотника; 3 – редукционный клапан; |
||||||||||||||
порциональный |
фактическому |
|||||||||||||
4 – блок встроенной электроники |
||||||||||||||
|
|
|
|
|
|
|
перемещению |
золотника. Элек- |
||||||
тронный блок, при необходимости, увеличивает напряжение на катушке электромагнита, пока золотник не переместится в требуемое положение.
73
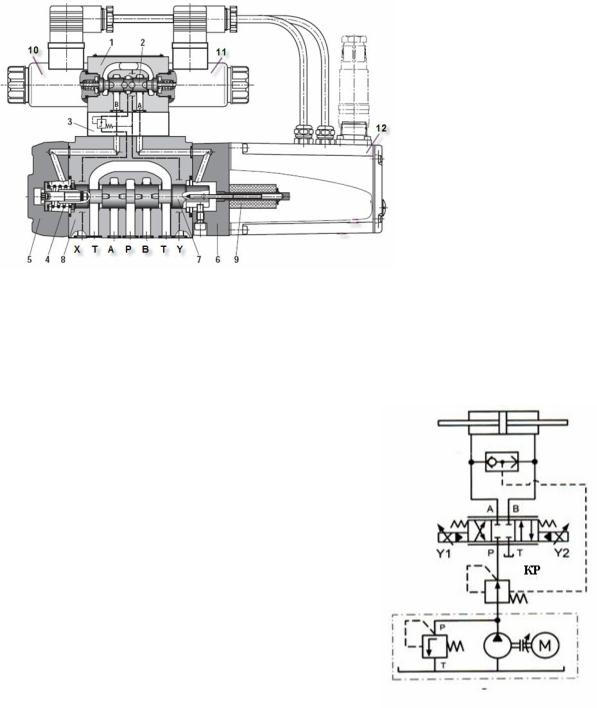
Рис. 7.10. Распределитель с электрогидравлическим пропорциональным управлением (тип 4WRKE10,
фирма Mannesmann Rexroth):
1, 2, 10, 11 – элементы пилота; 3 – редукционный клапан; 4, 5, 6, 7, 8 – элементы силового распределителя; 8 – индукционный
датчик перемещения золотника 7; 12 – блок встроенной электроники
В распределителях с пропорциональным управлением на концах поясков золотника выполнены проточки треугольной или иной формы, что позволяет плавно изменять площадь сечения потока. Благодаря этим проточкам распределитель обладает дросселирующими свойствами.
Распределитель с пропорциональным управлением, соединённый последовательно с клапаном постоянной разности давлений, слу-
жит хорошим стабилизато-
ром скорости гидродвигателя при изменении нагрузки
(рис. 7.11).
Расход через распределитель зависит от площа-
ди его проходного сечения и перепада давления. Ес- |
|
ли клапаном постоянной разности давлений КР |
|
обеспечить постоянный перепад давлений на распре- |
|
делителе, то расход будет постоянным и не завися- |
|
щим от давления на выходе, т.е. от нагрузки на гид- |
|
родвигатель. Для изменения скорости гидродвигате- |
|
ля необходимо изменить площадь окна распредели- |
|
теля. Это можно сделать изменением напряжения на |
|
обмотке электромагнита. Клапан постоянной разности |
|
давлений КР – это разновидность редукционного кла- |
|
пана. Одна линия управления клапаном взята с входа |
|
распределителя, другая с выхода (см. рис. 7.11). |
|
Основные требования к распределителю и дру- |
|
гим клапанам с пропорциональным управлением: |
|
– точное следование за изменениями входного |
|
управляющего электрического сигнала; |
|
– быстрота реагирования на изменение управ- |
|
ляющего сигнала. |
|
Быстрота реагирования характеризуется двумя |
Рис. 7.11. Схема стабилизации |
параметрами: |
скорости гидродвигателя |
– временем срабатывания, за которое выход- |
с использованием распределителя |
ной параметр аппарата достигает значения, соответ- |
с пропорциональным управлением |
|
ствующее входному управляющему сигналу;
– частотой пропускания – количеством изменений входного сигнала в секунду, на которое клапан успевает отреагировать.
7.5. Электрогидравлические усилители
Электрогидравлические усилители (ЭГУ) применяют в замкнутых (следящих) системах регулирования. Они обеспечивают более быстрое и точное срабатывание гидродвигателя, чем аппараты с пропорциональным управлением.
74
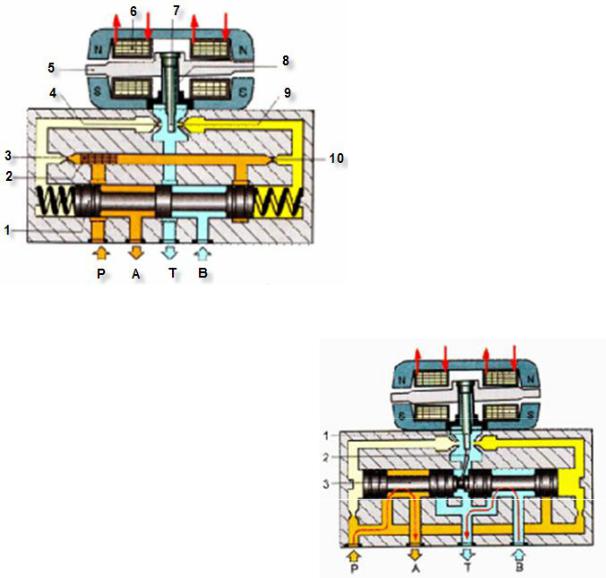
Рис. 7.12. Электрогидравлический усилитель (ЭГУ)
открывает маслу пути: Р – А и В – Т. Расстояние от заслонки до сопла, дав-
ление под торцом золотника, величина открытого окна, расход масла через ЭГУ пропорционален напряжению на обмотке 6.
Точность работы ЭГУ существенно повышается при наличии механической или электрической обратной связи между золотником и заслонкой. На рис. 7.13 изображен ЭГУ с механической обратной связью в виде упругого стержня 2.
При перемещении золотник 3 передаёт через упругий стержень 2 вращающий момент обратного знака на заслонку 1. Когда этот момент станет равным моменту, создаваемому электромагнитом, заслонка 1 встанет посередине между соплами, золотник 3 остановится. Для увеличения перемещения золотника 3 необходимо увеличить напряжение на обмотке электромагнита.
ЭГУ (рис. 7.12) содержит:
–электромеханический преобразователь (ЭМП) сигналов управления (6 – обмотка; 5 – якорь; 8 – упругая опора якоря);
–гидравлическую ступень предварительного усиления сигналов (4 и 9 – сопла; 7 – заслонка);
–силовой дросселирующий распределитель (1 – золотник; 2 – фильтр тонкой очистки; 3 и 10 – дроссели).
При подаче напряжения на обмотку 6 якорь 5 и заслонка 7 поворачиваются, заслонка приближается, например, к соплу 9, справа от золотника 1 повышается давление. Золотник смешается влево,
Рис. 7.13. ЭГУ с механической обратной связью между золотником и заслонкой:
1 – заслонка; 2 – упругий стержень обратной связи; 3 – золотник
Контрольные вопросы
1. Устройство и свойства пропорционального электромагнита. 2. Устройство и свойства предохранительного клапана с пропорциональным управлением. 3. Устройство и свойства редукционного клапана с пропорциональным управлением. 4. Конструктивные отличия и свойства распределителя с пропорциональным электрогидравлическим управлением. 5. Работа системы стабилизации скорости гидродвигателя с пропорциональным управлением и клапаном постоянной разности давлений. 6. Устройство, работа и свойства электрогидравлического усилителя с механической обратной связью по перемещению золотника.
75
8. РЕГУЛИРУЕМЫЕ ОБЪЁМНЫЕ ГИДРОПЕРЕДАЧИ
8.1. Способы и показатели регулирования скорости гидродвигателей
Известны зависимости:
– частота вращения вала гидромотора:
nм = (Qн – Qу)ηмо /qм = (qнnнηно – Qу)ηмо /qм; |
(8.1) |
– скорость штока гидроцилиндра:
vшт = (Qн – Qу)ηцо /Aц = (qнnнηно – Qу)ηцо /Aц. |
(8.2) |
В формулах (8.1) и (8.2) обозначено:Qн – расход масла на выходе насоса;Qу – расход утечек масла из напорной линии в сливную на пути от насоса до гидродвигателя; Ац – рабочая площадь гидроцилиндра (Ац = D2/4 – при выталкивании штока, Ац = (D2 – d2)/4 – при втягивании штока); ηмо и ηцо – объёмные КПД гидромотора и гидроцилиндра; qн и qм – рабочие объёмы насоса и гидромотора.
Из формул (8.1) и (8.2) следует, что скорость выходного звена гидродвигателя можно регулировать:
–изменением рабочих объёмов насоса qн и гидромотора qм. Такое регулирование называют объёмным или машинным. Разновидностью объёмного является ступенчатое регулирование, при котором насосы и гидродвигатели могут быть нерегулируемыми, но имеется возможность изменять количество гидродвигателей, одновременно подсоединяемых к одному насосу, или количество насосов, подсоединяемых к одному гидродвигателю;
–изменением расхода искусственно создаваемых утечек Qy. Такое регулирование называют дроссельным;
–изменением частоты вращения вала насоса nн. Это выполняют изменением час-
тоты вращения вала дизеля или электродвигателя.
Ниже рассмотрено объёмное и дроссельное регулирование. Приводы с объёмным
идроссельным регулированием существенно различаются по регулировочным и механическим (нагрузочным) характеристикам, КПД и стоимости.
Регулировочная характеристика гидропривода – это зависимость скорости вы-
ходного звена гидродвигателя от регулируемого параметра (рабочего объёма насоса или гидромотора, площади щели дросселя).
Механическая характеристика гидропривода – это зависимость скорости выход-
ного звена гидродвигателя от величины нагрузки, т.е. силы или момента сил сопротивления движению.
Степень мягкости механической характеристики характеризует интенсивность изменения скорости выходного звена гидродвигателя при изменении нагрузки.
Вприводах с жесткой механической характеристикой скорость изменяется несущественно при изменении нагрузки. В таких приводах изменение скорости зависит от расхода дренажных утечек в насосах, гидродвигателях и аппаратах, а также от жесткости механических характеристик первичных двигателей – дизельных или электрических.
Вприводах с мягкой механической характеристикой скорость выходного звена гидродвигателя при изменении нагрузки может изменяться до двух и более раз. Примерами могут служить регулируемые объёмные гидроприводы, автоматически поддерживающие постоянную мощность при изменении нагрузки.
Показатели регулирования:
–скоростной диапазон – отношение максимальной скорости выходного звена гидродвигателя к минимальной скорости при номинальном давлении;
76
–силовой диапазон – отношение максимального вращающего момента на валу мотора к минимальному значению при номинальном давлении;
–КПД регулируемых гидропередач. У приводов с объёмным регулированием КПД практически одинаков с КПД нерегулируемых передач. У приводов с дроссельным регулированием КПД весьма низок. По этой причине дроссельное регулирование применяют в маломощных приводах – до 5, реже до 10 кВт.
8.2. Объёмное регулирование скорости
Использование регулируемого насоса
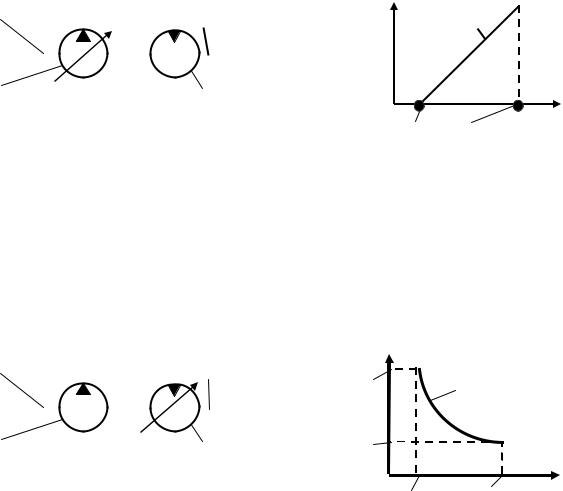
Из формул (8.1) и (8.2) следует, что частота nм и скорость vшт прямо пропорциональны первой степени рабочего объёма насоса, т.е. регулировочные характеристики nм = f(qн) и vшт = f(qн) линейны. Анализ выполнен применительно к регулированию скорости вала гидромотора (рис. 8.1, а) при номинальном давлении рн в напорной линии.
Вращение вала нагруженного гидромотора начинается после того, как рабочий объём насоса превысит некоторую величину qно и теоретическая производительность насоса qнnн станет больше расхода внутренних утечек в насосе и гидромоторе. Регулировочная характеристика nм = f(qн) начинается из точки qн = qно (рис. 8.1, б).
a) |
|
|
|
|
б) |
|
||
nн = const |
|
nм = var |
nм |
nм = f(qн) |
||||
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qн = var |
|
qм = const |
|
qНО |
qНmax |
qН |
Рис. 8.1. Регулирование скорости гидродвигателя с использованием регулируемого насоса: а – схема; б – регулировочная характеристика
Если КПД гидромотора при изменении частоты nм и КПД насоса при изменении рабочего объёма qн считать постоянными, то во всем диапазоне qно qн qн max вращающий момент Тм на валу гидромотора постоянен, а частота вращения вала nм и мощ-
ность на валу мотора Рмвых прямо пропорциональны величине qн.
Использование регулируемого гидромотора
а) |
|
|
|
б) |
|
||
nн = const |
|
|
|
nм |
|
||
|
nм = var |
|
|||||
|
|
||||||
|
|
|
|
|
|||
|
|
|
|
|
|
nм max |
nм = f(qм) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qн = const |
|
qм = var |
nм min |
qм min |
qм max qм |
Рис. 8.2. Регулирование скорости с использованием регулируемого гидромотора: а – схема; б – регулировочная характеристика
77
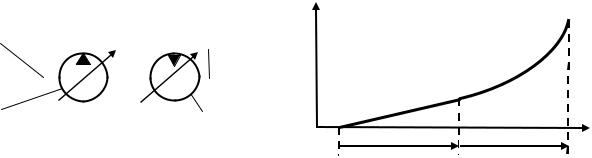
Анализ выполнен при условии, что давление в напорной линии постоянно и равно номинальному рн (рис. 8.2, а). Из формулы (8.1) следует, что регулировочная характеристика nм = f(qм) имеет вид гиперболы (рис. 8.2, б).
Максимальный рабочий объём qм max ограничен конструктивными возможностями гидромотора. Минимальное значение qм ограничивают значениями (0,2…0,5)qм max, так как при малых qм существенно увеличивается частота вращения вала мотора, уменьшается КПД и ресурс.
Использование регулируемых насоса и гидромотора
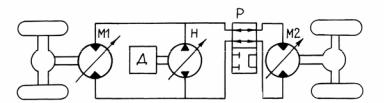
Регулирование скорости можно выполнять поочередным или одновременным изменением рабочих объёмов насоса и гидромотора (рис. 8.3). Изобразить на плоскости регулировочную характеристику nм = f (qн, qм) при одновременном изменении qн и qм невозможно. На рис. 8.3, б изображён график изменения частоты nм при поочередном изменении рабочих объёмов qн и qм. Сначала изменяли рабочий объём насоса от qн = qно до qн max при максимальном рабочем объёме гидромотора qм max. Затем при фиксированном объёме qн max уменьшали qм до qм min. Давление рн принято постоянным.
а) |
|
|
|
б) |
||
nн = const |
|
|
|
nм |
||
|
nм = var |
|||||
|
||||||
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qн = var |
|
qм = var |
|
Увеличение qн |
Уменьшение qм |
|
qно |
qн max |
qн max |
qм max |
qм max |
qм min |
Рис. 8.3. Регулирование скорости с использованием регулируемых насоса и гидромотора: а – схема; б – регулировочная характеристика при последовательном изменении qн и qм
Поочередное изменение qн и qм позволяет в начале разгона увеличивать скорость машины или рабочего органа при максимальном вращающем моменте гидромотора. Когда qн достигает значения qн max, а исполнительный механизм набрал значительную скорость, её дальнейшее увеличение осуществляют уменьшением рабочего объёма гидромотора.
Многие машины разгоняют при одновременном изменении рабочих объёмов насосов и моторов. Разгон начинают при qно и qм max, затем qн увеличивают до значений qн max с одновременным уменьшением qм до значений qм min = (0,2…0,5) qм max.
Диапазоны объёмного регулирования
Если не учитывать изменения КПД насоса и гидромотора при изменении их рабочих объёмов, то скоростной и силовой диапазоны регулирования можно выразить через отношения предельных значений рабочих объёмов qн и qм.
Привод с регулируемым насосом:
– скоростной диапазон регулирования
e |
|
nмmax |
|
qнmax |
20, |
(8.3) |
|
n |
q |
||||||
n |
|
|
|
|
|||
|
|
мmin |
|
но |
|
|
78
–силовой диапазон регулирования ет = 1, так как при постоянном давлении pн вращающий момент Tм постоянен.
Привод с регулируемым гидромотором:
–скоростной и силовой диапазоны
e |
e |
|
qмmax |
2...5. |
(8.4) |
||
|
|
||||||
n |
т |
|
qмmin |
|
|||
Привод с регулируемыми насосом и гидромотором: |
|
||||||
– скоростной диапазон |
qнmaxqмmax |
|
|
|
|||
e |
40...100, |
(8.5) |
|||||
|
|||||||
n |
q |
q |
|
||||
|
но |
мmin |
|
||||
– силовой диапазон ет: см. формулу (8.4). |
|
||||||
Ступенчатое регулирование скорости |
|||||||
|
|
|
|
|
|
На рис. 8.4 изображена |
|
|
|
|
|
|
|
схема, позволяющая реализо- |
|
|
|
|
|
|
|
вать две разновидности объ- |
|
|
|
|
|
|
|
ёмного регулирования скоро- |
|
|
|
|
|
|
|
сти гидродвигателей – изме- |
|
|
|
|
|
|
|
нением рабочих объёмов на- |
|
Рис. 8.4. Схема ступенчатого и бесступенчатого |
соса Н и моторов М1, М2 |
||||||
регулирования скорости |
|
|
|
|
(бесступенчатое регулирова- |
||
ние) и изменением числа гидромоторов, параллельно соединяемых с одним насосом (ступенчатое регулирование).
Мотор М2 можно включать и выключать распределителем Р. При включении мотора М2 подача насоса Н делится между моторами М1 и М2, скорость движения машины в два раза уменьшается, а суммарный вращающий момент на колёсах и тяга в два раза увеличивается.
8.3. Регуляторы насосов
Наиболее распространены:
–регулятор производительности с мускульным приводом;
–регулятор производительности с гидравлическим сервоуправлением;
–регулятор постоянной мощности в напорной линии;
–регулятор постоянного давления в напорной линии;
–регулятор постоянной скорости гидродвигателя путём поддержания постоянного перепада давления на кромке золотника силового дросселирующего распределителя;
–регулятор с отсечкой по давлению, переводящий насос на близкую к нулевой производительность при давлении, близком к максимально допустимому.
Регуляторы производительности с мускульным приводом и гидравлическим сервоуправлением
При мускульном приводе регулятора (рис. 8.5) его поршень перемещают и изменяют рабочий объём и производительность насоса поворотом винта.
При гидравлическом сервоуправлении (рис. 8.6) поршень регулятора перемещают подачей давления по линиям Х1 или Х2.
79
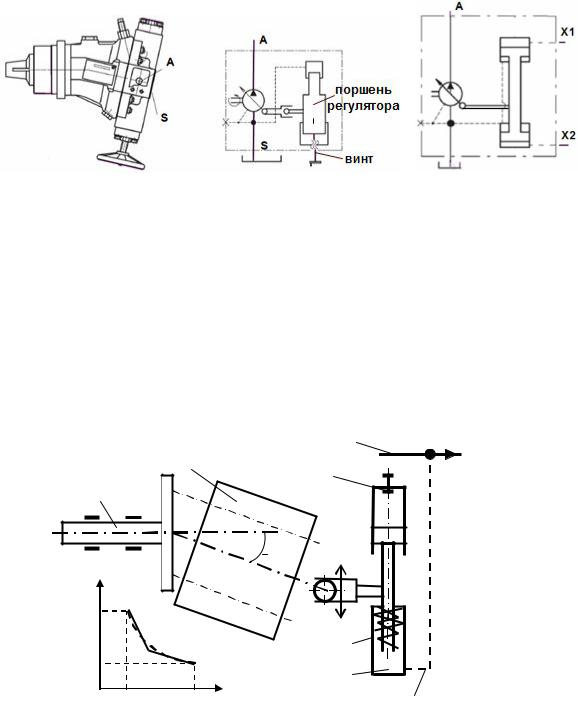
Рис. 8.5. Насос с мускульным приводом регулятора |
Рис. 8.6. Насос с гидравлическим |
сервоуправлением регулятором |
Регулятор прямого действия для поддержания постоянной мощности насоса
Регулятор изменяет рабочий объём и расход Qн при изменении давления рн в напорной линии, при этом мощность в напорной линии Р = рнQн и на валу насоса остаётся практически постоянной.
Достигается это тем, что давление из напорной линии подаётся под нижний поршень регулятора (рис. 8.7). При повышении давления поршень перемещается вверх, сжимая комплект пружин, изменяя угол γ наклона блока цилиндров, рабочий объём и подачу насоса. При понижении давления пружины перемещают поршень вниз, увеличивая угол γ и подачу насоса.
Напорная линия насоса
Блок цилиндров |
Вал насоса |
Q |
Qmax

 Ограничитель γmin
Ограничитель γmin
γ |
|
qmin |
|
|
|
|
|
|
qmax
Qmin |
|
|
Регулятор |
|
|
|
|
|
|
|
|
|
|
насоса |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||||
pmin |
pmax p |
Ограничитель γmax |
|
|
|
||||||
|
|||||||||||
|
|
Линия обратной связи по давлению |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Рис.8.7. Регулятор прямого действия для поддержания постоянства мощности насоса
В регуляторе две пружины – короткая и длинная. Сначала сжимается длинная пружина, а при большом давлении сжимаются обе пружины. По этой причине характеристика Q = f(p) ломаная. Она приближается к гиперболе рQ = const.
Иную схему регулятора постоянной мощности имеют, например, насосы типа 313 (рис. 8.8).
Давление из напорной линии насоса подано в камеру над малым поршнем регулятора, оттуда через дросселирующий двухпозиционный распределитель – в камеру под большим поршнем. Этим давлением поршень перемещается вверх и уменьшает рабочий объём и производительность насоса. Вместе с поршнем вверх перемещается дрос-
80