

книги / Основы теории подобия и моделирования физических процессов
..pdfλнtн λфtф ,
которое будет являться критерием подобия (эквивалентности) испытаний.
Отсюда можно найти время форсированных испытаний:
|
|
|
|
t |
λн |
t |
|
|
tн |
, |
|
|
|
|
|
|
н |
|
|||||
|
|
|
|
ф |
λф |
|
|
Kу |
|
||
|
|
|
|
|
|
|
|
|
|||
где K |
|
|
λф |
– коэффициент ускорения испытаний, показывающий, |
|||||||
у |
λн |
||||||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
во сколько раз время форсированных испытаний будет меньше времени испытаний в нормальных условиях эксплуатации.
Таким образом, чтобы ускорить испытания на надежность, необходимо увеличить интенсивность отказов гидравлических устройств. Интенсивность отказов зависит от многих факторов, которые можно использовать в качестве ускоряющих. Это давление, температура, вибрация, влажность и т.п.
Для проведения форсированных испытаний предварительно должны быть известны зависимости интенсивности отказов от ускоряющих факторов.
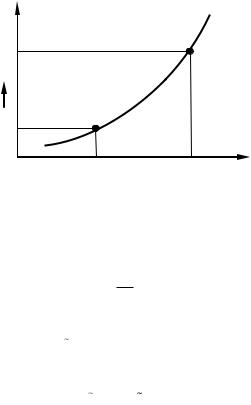
Пусть известна зависимость
λ λ p ,
где p – давление рабочей жидкости в гидравлическом устройстве,
которое выбрано в качестве ускоряющего фактора.
Представим эту зависимость качественно в графической форме
(рис. 4).
Увеличение давления в гидроустройстве с pн до pф приводит к росту интенсивности отказов от λн до ф , т.е. к ускорению испытаний.
41
2
ф
1
н
0 |
pн |
|
p |
|
pф |
||||
|
||||
|
|
|||
|
|
|
|
Рис. 3.1
Коэффициент ускорения
Kу λф 1.
λн
Если в ходе форсированных испытаний получено среднее время работы до отказа T0ф , то его можно пересчитать на нормальный режим по формуле
T0н KуT0ф .
Аналогичным образом могут быть рассмотрены и другие ускоряющие факторы.
Форсированные испытания могут разрабатываться на основе других критериев подобия. Форсированный режим испытаний должен быть подобен нормальному (эксплуатационному) режиму по основным разрушающим факторам, к числу которых относят:
износ;
старение;
накопление усталостных повреждений.
42
Каждому из этих факторов соответствует свой критерий подобия форсированных и нормальных испытаний.
Гидравлическое устройство состоит из разнотипных элементов. Для каждого разрушающего фактора рекомендуется выбирать один или несколько критических (наиболее «слабых») элементов. Например, для объемного гидропривода поступательного движения критическими элементами являются:
по износу – штоковые уплотнения гидроцилиндров;
по старению – резиновые уплотнения;
по накоплению усталостных повреждений – корпуса гидроцилиндров и элементы поршневой группы.
Форсирование режимов осуществляется, в основном, за счет увеличения скорости движения узлов и температуры, а также нагрузки.
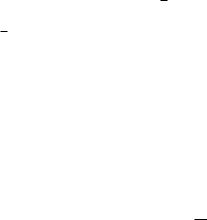
Критерием подобия (условием эквивалентности) форсированных и нормальных испытаний может служить равенство необратимых относительных изменений:
L idem,
где L – необратимое относительное изменение в гидравлическом устройстве.
Изобразим график накопления необратимых относительных изменений в форсированном и нормальном режимах (рис. 3.2).
Заданный уровень накопления необратимых относительных изменений при форсированных испытаниях достигается раньше, чем при нормальных испытаниях tф tн . Тогда коэффициент ускорения
может быть найден по формуле
Kу tн . tф
43
L
Lф Lн
L0
н
0 |
tф |
tн |
t |
|
Рис. 3.2
При разработке форсированных испытаний важно иметь соотношения для определения необратимых относительных изменений в критических элементах гидроустройств и зависимости коэффициента ускорения испытаний от принятых ускоряющих факторов. Однако этот вопрос требует отдельного рассмотрения.
3.3. Приложение теории подобия к задачам тестовой вибродиагностики
3.3.1. Общие сведения о тестовой вибродиагностике
Тестовая вибродиагностика предполагает наличие специального (тестового) вибрационного воздействия на объект диагностирования. Его параметры подбираются так, чтобы обеспечить эффективную диагностику объекта. Тестовая вибродиагностика применяется в тех случаях, когда объект не излучает вибрацию в процессе функционирования либо возникают трудности в регистрации и анализе вибрационных характеристик в условиях эксплуатации.
Типовыми объектами тестовой вибродиагностики являются авиационные конструкции, трубопроводы, корпусные детали гидравлических устройств, стержневые конструкции и фермы, многослойные соединения и т.п.
44
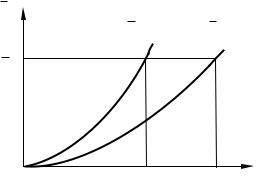
Объекты тестовой вибродиагностики могут быть схематизированы колебательной системой с одной степенью свободы (рис. 3.3).
P(t) P cos t
m
x
k |
b |
|
|
Рис. 3.3 |
|
Здесь приняты следующие обозначения: |
m – масса объекта |
||
диагностирования; |
b |
– коэффициент демпфирования; k – коэффи- |
|
циент жесткости; |
x |
– перемещение объекта относительно положе- |
|
ния статического |
равновесия; P(t) Pcos ωt |
– тестовый сигнал |
|
в виде гармонической вынуждающей силы с амплитудой P и угло- |
|||
вой частотой ω ; t |
– время. |
|
|
Установившиеся вынужденные колебания объекта тестовой вибродиагностики описываются уравнением
mx bx kx Pcos t .
В рамках принятой математической модели появление дефекта приводит к изменению коэффициента жесткости k или коэффициента демпфирования b . Возможно совместное изменение указанных величин.
Например, при возникновении в конструкции усталостных трещин, нарушении клеевых соединений наблюдается снижение жесткости. В случае ослабления болтов и заклепок в равной мере могут изменяться как упругие, так и диссипативные характеристики сис-
45

темы. Состояние предразрушения многих типовых элементов машин (лопаток турбин, гибких стержней, канатов и т.п.) характеризуется преобладающим изменением величины внутреннего трения.
Поэтому задачи тестовой вибродиагностики обычно решаются путем отслеживания изменений жесткостных и диссипативных характеристик объекта. Однако непосредственное измерение параметров k и b в диагностируемом объекте затруднено.
Заключение об изменении параметров k и b , а значит
ио возникновении дефекта, делают на основании косвенных виброизмерений и сопоставления их результатов с предельно допустимыми значениями, заранее полученными для бездефектного объекта.
Для косвенных измерений используют параметры резонансного состояния объекта (например, перемещения, скорости, ускорения
ит.п.), которые имеют высокую чувствительность к изменению жесткостных и диссипативных характеристик. Такие параметры несут информацию о зарождении, развитии и возникновении дефектов
иназываются диагностическими признаками дефектов.
Соотношения, устанавливающие связь между диагностическими признаками и изменениями жесткостных и диссипативных характеристик объекта, именуются диагностическими моделями.
3.3.2. Построение диагностической модели на основе теории подобия
Рассмотрим подобие двух состояний объекта тестового вибродиагностирования. Первое состояние объекта – заведомо бездефектное (состояние после изготовления или ремонта, которое может быть принято в качестве исходного состояния объекта). Второе состояние объекта – состояние диагностирования, которое характеризуется измененными параметрами жесткости и демпфирования.
Указанные состояния описываются аналогичными дифференциальными уравнениями.
В бездефектном состоянии уравнение колебаний объекта имеет вид
m x b x |
k x |
P cos t . |
(3.22) |
|||||
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 1 |
|
46
Индекс 1 указывает на то, что соответствующие параметры относятся к бездефектному состоянию объекта.
Уравнение объекта в состоянии диагностирования
m2 x2 b2 x2 k2 x2 P2 cos 2t . |
(3.23) |
Индекс 2 обозначает принадлежность параметров к состоянию объекта при диагностических измерениях.
Для установления подобия потребуем пропорциональности сходственных параметров и равенства критериев подобия, составленных из этих параметров.
Введем в рассмотрение масштабные коэффициенты (константы подобия), устанавливающие пропорциональность сходственных параметров рассматриваемых состояний объекта диагностирования:
|
|
m2 |
|
|
Nm , |
b2 |
|
Nb , |
k2 |
|
Nk , |
P2 |
NP , |
|
|
|||||||||
|
|
m |
|
|
b |
k |
P |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
(3.24) |
||
x2 |
|
|
|
|
|
x2 |
|
|
|
|
x2 |
|
|
|
|
ω2 |
|
|
|
|
t2 |
|
|
|
N |
|
|
, |
N |
, |
N |
, |
N |
|
, |
N . |
|
||||||||||||
|
x |
|
|
|
ω |
|
|
|||||||||||||||||
x1 |
|
|
|
x1 |
|
x |
|
x1 |
|
x |
|
ω1 |
|
|
|
t1 |
|
t |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Выразим параметры объекта в состоянии диагностирования через параметры бездефектного состояния и масштабные коэффициенты:
m m N |
m |
, b b N |
, k |
2 |
k N |
, P P N |
P |
, |
|
|
||
2 |
1 |
2 |
1 b |
|
1 k |
2 1 |
|
(3.25) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 x1Nx , |
x2 x1Nx , |
x2 x1Nx , ω2 ω1Nω , t2 t1Nt . |
|
|||||||||
Подставим соотношения (3.25) в уравнение (3.23). В результате получим
N |
m |
N m x N |
N b x N |
N k x |
P N |
P |
cos N |
|
N t |
|
|
|||||||
|
|
x 1 1 |
b |
x 1 1 |
k |
x 1 1 |
1 |
|
|
t 1 1 |
|
|||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nm Nx |
m x |
Nb Nx |
b x |
Nk Nx |
k x P cos N |
|
N ω t |
. (3.26) |
|||||||||
|
|
|
|
|
||||||||||||||
|
|
|
1 1 |
|
1 1 |
|
NP |
1 1 1 |
|
|
t 1 1 |
|
|
|||||
|
|
NP |
|
NP |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
47 |
Для тождественности уравнений (3.22) и (3.26) необходимо выполнение условий:
Nm Nx |
1, |
Nb Nx |
1, |
Nk Nx |
1, N |
|
N |
|
1 . |
(3.27) |
|
|
|
|
t |
||||||
NP |
NP |
NP |
|
|
|
|||||
|
|
|
|
|
||||||
Полученные соотношения называются индикаторами подобия. Подставляя в выражение (3.27) масштабные коэффициенты (3.24), находим критерии подобия рассматриваемых состояний объекта диагностирования:
|
m1x1 |
|
m2 x2 |
|
|
b1x1 |
|
b2 x2 |
|
|
||||||
|
|
|
|
|
|
|
, |
|
|
|
|
, |
|
|||
|
P |
P |
P |
P |
|
|||||||||||
|
|
|
|
|
|
|
|
|||||||||
1 |
|
|
|
2 |
|
|
|
1 |
|
2 |
|
(3.28) |
||||
|
|
k1x1 |
|
|
k2 x2 |
|
|
|
|
|
|
|||||
|
|
|
, |
t t . |
|
|||||||||||
|
|
|
|
|
||||||||||||
|
|
P |
|
|
|
P |
|
|
1 1 |
2 2 |
|
|
||||
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
||||
Рассмотрим подобие состояний объекта в реальном масштабе |
||||||||||||||||
времени. В этом случае |
Nt 1, |
Nω 1. Масса объекта в процессе |
||||||||||||||
эксплуатации не изменяется, т.е. |
|
Nm 1 . Поэтому из совокупности |
||||||||||||||
критериев (3.28) существенными в рамках решаемой задачи диагностирования являются следующие критерии подобия:
|
b1x1 |
|
b2 x2 |
|
, |
k1x1 |
|
|
k2 x2 |
. |
(3.29) |
||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
P |
|
|
|
P |
|
|
|
P |
|
|
|
|
|
|
P |
|
||||
1 |
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|||||
Критерии подобия (3.29) позволяют получить диагностиче- |
|||||||||||||||||||||
скую модель |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
b |
|
P2 |
|
|
|
x1 |
|
, |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
2 |
1 |
|
P |
|
|
|
x |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
(3.30) |
||||||
|
|
|
|
|
|
|
|
P2 |
|
|
|
x1 |
|
|
|
||||||
|
|
k |
|
|
k |
|
|
|
|
. |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
2 |
1 |
|
P |
|
|
|
x |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
||||||
Если принять предположение о постоянстве амплитуды тесто-
вого гармонического воздействия P P , подбором угловой частоты
1 2
ω установить в объекте резонансные колебания, а величины
48
x1, |
x2 , x1, x2 |
заменить их амплитудными значениями при резонансе |
||||||||
Ax1, |
Ax2 , Ax1, |
Ax2 , то диагностическая модель (3.30) примет вид |
||||||||
|
|
b b |
Ax1 |
, k |
|
k |
Ax1 |
. |
(3.31) |
|
|
|
|
|
|
||||||
|
|
2 |
1 A |
|
2 |
1 A |
|
|||
|
|
|
|
x2 |
|
|
|
x2 |
|
|
|
Величины k1, b1, Ax1 |
и Ax1 |
должны быть определены заранее |
|||||||
для заведомо бездефектного состояния объекта. |
|
|||||||||
|
Амплитуды скорости Ax 2 |
и перемещения |
Ax 2 объекта в со- |
|||||||
стоянии диагностирования измеряются соответствующей аппаратурой. Далее с помощью соотношений (3.31) находятся измененные параметры жесткости k2 и демпфирования b2 и на основе решаю-
щего правила устанавливается факт наличия или отсутствия дефекта, например:
k |
, b |
: нет дефекта; |
|
|
2 |
2 |
|
R : |
|
|
: есть дефект . |
k2 |
, b2 |
||
|
|
|
|
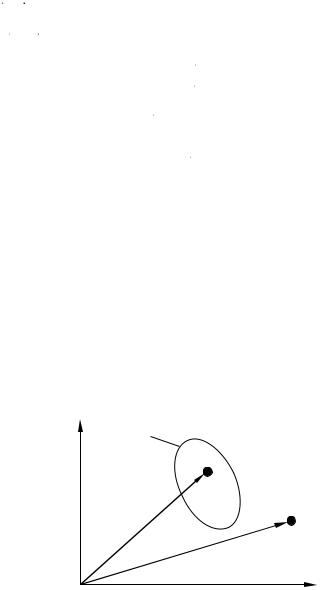
Здесь – область бездефектного состояния объекта в двухмерном пространстве параметров k2 и b2 , граница которой образована предельно допустимыми значениями этих параметров (рис. 3.4).
b2 |
|
|
|
|
k2 , b2 |
|
k2 , b2 |
|
0 |
|
k2 |
|
Рис. 3.4 |
|
49 |
3.4. Электрическое моделирование механических колебательных систем
В основе электрического моделирования колебаний механических систем лежит аналогия между различными по своей физической природе явлениями – механическими колебаниями и колебательными процессами в электрических цепях, состоящих из дросселей, конденсаторов, резисторов, трансформаторов, генераторов тока и напряжения [15]. При этом непосредственное исследование колебаний сложной механической системы, материальная реализация которой связана с определенными технико-экономическими трудностями, может быть заменено изучением колебательного процесса в электрической цепи, изготовление которой не требует особых затрат труда и средств. Приведем по этому поводу высказывание Н.Е. Жуковского: «…если одно из двух математически аналогичных явлений сложно и трудно наблюдается, а другое может быть осуществлено на простом приборе, то опытное изучение второго явления может расширить наше знакомство с первым, несмотря на то, что оба явления могут представлять неразрешимую математическую задачу».
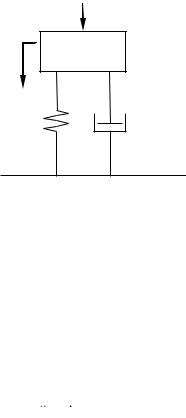
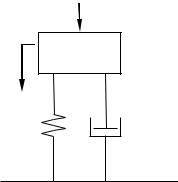
Идею метода электромеханических аналогий рассмотрим на примере простых систем с одной степенью свободы. На рис. 3.5 схематично изображена механическая колебательная система с одной степенью свободы.
P(t)
m
x
k |
b |
Рис. 3.5
50