

книги / Проектирование и исследование идентификационных моделей управляющих систем реального времени
..pdfРис. 1.2. Два основных этапа проектирования
3. Строгая детерминированность проектирования в событийновременном пространстве. Так, при переходе из некоторого состояния tн
в последующее tк путем преобразования входного сигнала Z в выходной сигнал F (рис. 1.3) к моментам времени tн − tк в соответствии
с функционированием объекта управления строго определенные действия должны производиться «не раньше и не позже».
11

Рис. 1.3. Объект управления и управляющая ВС РВ
Таким образом, при проектировании УС РВ следует учитывать следующие положения:
1. Под проектированием УС РВ для управления автоматизируемым объектом понимается процесс придания УС РВ конкретно требуемых свойств (параметров, характеристик, а также функций, каналов и пр.), насколько об этом можно судить по предварительному изучению на уровне имеющихся знаний и принятых положений.
2.Начальным задающим этапом, который непременно входит в общий процесс, является предпроектирование, при котором действия направлены на составление начального технического задания (ТЗ), которое последовательно трансформируется на последующих этапах с необходимым сохранением полезной информации (насколько это возможно).
3.Определяющим в проектировании УС РВ является разработка алгоритмов управления, которые затем закладываются в техническую часть УС РВ, что требует особого внимания, учитывая специфику применения, так как возможные ошибки на этом уровне могут иметь такие последствия, которые не могут быть компенсированы никакими техническими достижениями в последующем.
4.Обычная базовая форма ТЗ – развернутые прямые требования, которые сохраняют больше полезной информации, чем комбинационные приемы, например в случае придания некоторого сложного критериального вида.
Следует отметить, что основополагающим фактором в функционировании систем реального времени является время.
Исходные требования к времени реакции системы и другим временным параметрам определяются или техническим заданием на систему, или просто логикой ее функционирования:
– реакция управляющей системы на внешнее воздействие (входной сигнал) должна следовать через определенный промежуток времени;
– реакция управляющей системы на внешнее воздействие не должна превосходить строго заданный временной интервал, система должна обладать заданным быстродействием. Быстродействие системы
12
реального времени должно быть тем больше, чем больше скорость протекания процессов на объекте контроля и управления.
Принято различать системы «жесткого» и «мягкого» реального времени.
Системой «жесткого» реального времени называют систему, в которой неспособность обеспечить реакцию на какие-либо события в заданное время является отказом и ведет к невозможности решения поставленной задачи. В качестве условной временной границы допустимого времени реакции обычно принимают 100 мкс. В жесткой системе:
–никакое опоздание неприемлемо ни при каких обстоятельствах;
–результат, выданный с опозданием, бесполезен;
–нарушение крайнего срока времени отклика рассматривается как катастрофический отказ;
–цена превышения заданного времени отклика бесконечно велика. Точного определения для системы «мягкого» реального времени
не существует, но принято считать, что она иногда может не успевать делать все, что надо, в установленные сроки. В «мягкой» системе:
– возрастает цена за опоздание результата;
– критическим фактором является низкая производительность,
ане опоздания.
Втерминах вероятностей эти определения могут быть записаны следующим образом:
– для систем «мягкого» реального времени
|
P{ |
|
|
|
t – t0 |
|
|
|
> ∆ t}> 0 ; |
(1.1) |
|
|
|
|
|
||||||
– для систем «жесткого» реального времени |
|
|||||||||
где t |
P{ |
|
t – t0 |
|
> ∆ t}= 0 , |
(1.2) |
||||
|
|
|||||||||
– фактический момент выдачи управляющего воздействия; |
|
|||||||||
t0 |
– заданный момент выдачи управляющего воздействия; |
|
||||||||
∆ |
t – допустимая погрешность. |
|
||||||||
Функциональная схема реализации УС РВ в общем виде представлена на рис 1.4 [2].
Основными составляющими управляющих систем реального времени являются комплекс технических средств, программное и информационное обеспечение.
13
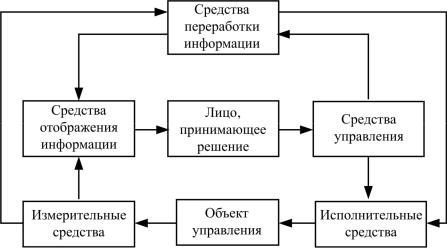
Рис. 1.4. Схема УС РВ
Для принятия решения по управлению нужно знать о состоянии объекта управления и возмущениях со стороны внешней среды. Эта информация вводится в систему с помощью измерительных средств, которые являются источниками информации для средств переработки информации. Эти средства реализуют алгоритм принятия решения и формируют управляющие воздействия, которые передаются на исполнительные средства, непосредственно связанные с изменяемыми параметрами объекта управления.
Для того чтобы человек участвовал в процессе принятия решения, ему также нужно дать возможность следить за состоянием объекта и внешней среды. Для этого он снабжается устройствами отображения, которые предназначены для преобразования информации в удобную для восприятия форму (чаще всего – в визуальную). Человек может вмешиваться в управление, воздействуя на исполнительные средства и на средства переработки информации с помощью управляющих средств.
В качестве средств переработки информации обычно применяется вычислительное устройство (ВУ). Тип и структура ВУ может быть различной – от простейшего контроллера до кластера, однако в любом случае его применение связано со следующими особенностями:
–он должен «следить» за множеством параллельно протекающих процессов;
–он должен обрабатывать запросы, поступающие в произвольные моменты времени;
14
–допустимое время принятия решения обычно соизмеримо с временем реализации алгоритма выработки такого решения;
–он должен удовлетворять повышенным требованиям по надежности и достоверности информации;
–состав задач, которые решает этот узел, заранее известен, и программное обеспечение для их решения отлажено.
Эти особенности учитываются при проектировании программного обеспечения. Оно включает в себя операционную систему, программы решения функциональных задач и программы контроля и обеспечения устойчивости вычислительного процесса.
Режим реального времени предъявляет требования не только
кпрограммному обеспечению, но и к аппаратному, особенно к измерительным средствам. От них требуется наблюдение за объектом. В системе, функционирующей в реальном масштабе времени, информация, приходящая извне, либо воспринимается и обрабатывается на ВУ непосредственно в момент ее поступления, если ВУ не загружен работой или приоритет запроса самый высокий, либо фиксируется
ипоступает в обработку в зависимости от приоритета запрашиваемого устройства. В системе обработки информации в реальном масштабе времени для каждой такой задачи устанавливается реально необходимый промежуток времени, в течение которого соответствующий запрос должен быть обязательно выполнен. В зависимости от уровня запрашиваемого устройства в структуре технических средств и важности самого запроса при одинаковом уровне двух или большего числа устройств устанавливаются приоритеты запросов. Указанной системой приоритетов определяется дисциплина очереди при решении любых задач управления.
При создании систем реального времени приходится решать проблемы привязки внутрисистемных событий к моментам времени, своевременного захвата и освобождения системных ресурсов, синхронизации вычислительных процессов, буферизации потоков данных и т.п. Системы реального времени обычно используют специализированное оборудование (например, таймеры) и программное обеспечение (например, операционные системы реального времени).
15
1.2.ПРИМЕНЕНИЕ ИДЕНТИФИКАЦИОННЫХ МОДЕЛЕЙ
ВПРОЕКТИРОВАНИИ УПРАВЛЯЮЩИХ СИСТЕМ РЕАЛЬНОГО ВРЕМЕНИ
Процесс создания систем управления объектами немыслим без моделирования совместной работы самого объекта управления и проектируемой системы.
Во временном пространстве создание как модели объекта, так
имодели УС РВ можно разделить на два этапа:
1)создание модели на этапе проектирования;
2)уточнение модели во время функционирования УС РВ.
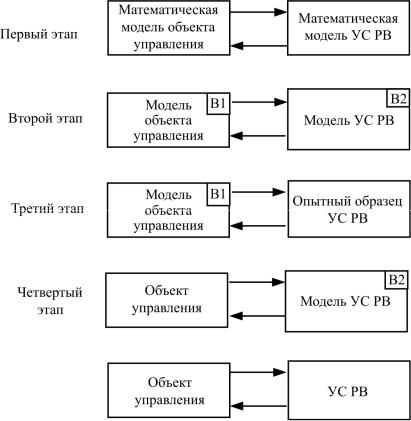
На первоначальном этапе разработки, когда система еще только проектируется, используются чисто математические модели [3]. На следующем этапе (условно назовем его вторым) приходится использовать две отдельные модели, обменивающиеся физическими сигналами: объекта управления и системы управления. Когда система управления спроектирована и построена (третий этап), для первоначальной ее отладки и настройки целесообразно использовать модель объекта и только на последующих этапах переносить работу на объект. Но даже при работе на объекте (четвертый этап) для поиска наиболее сложных нестыковок приходится иногда применять модель системы управления вместо самой системы (рис. 1.5). Если на первом этапе (при математическом моделировании) удается обойтись универсальными ЭВМ, то остальные этапы требуют специализированных модулей (назовем их В1 и В2), в которых вычислительные возможности должны сочетаться с возможностями ввода-вывода физических сигналов.
Главная задача, которая ставилась при построении комплекса, – создать инструмент, с помощью которого разработчики систем управления могут вести работы по наладке и доводке этих систем путем моделирования как объекта управления, так и самой системы управления (и, естественно, их взаимных связей). Другими словами (в рамках понятий рис. 1.5), должны быть разработаны модули В1 и В2, а также обеспечена возможность их работы в различных сочетаниях.
Поскольку подобный путь проходят (и проходили ранее) практически все системы управления при их разработке, то отдельные элементы разрабатываемого комплекса существовали и ранее. Однако все эти элементы существовали в разрозненном состоянии и не всегда были реализованы с использованием современных подходов. Это, с одной
16
PNRPU
Рис. 1.5. Моделирование на различных этапах разработки УС РВ
стороны, увеличивало сроки и затраты на разработку, а с другой стороны, зачастую не позволяло производить моделирование в полном объеме и с необходимым качеством.
С точки зрения функционирования разрабатываемые модули В1 и В2 должны представлять собой некоторые вычислители, позволяющие выполнять следующие работы:
–решение уравнений различного вида и типа (интегрирование уравнений движения, преобразование координат и др.);
–визуальное отображение результатов моделирования, включая таблицы, графики, двух- и трехмерное изображение объектов и условных значков;
–ввод-вывод физических сигналов различных уровней (по напряжению, по току, уровня TTL и др.).
Как уже отмечалось, УС РВ отличаются от других систем тем, что режим полноразмерного функционирования систем данного класса за-
17
висит от того, насколько слаженно будут работать все подсистемы УС РВ. Неточности в проектировании приводят к критическому состоянию, когда УС РВ либо не справляется с поставленной задачей за положенный интервал времени, либо выдает «неправильные» управляющие сигналы. Поэтому проработка модели как объекта, так и УС РВ на этапе проектирования является особенно важной.
Наиболее оптимальным методом разработки модели является экспериментальный метод – метод идентификации, т.е. построение модели на основе наблюдений процессов, протекающих в объекте.
Выбор характера математического описания, т.е. вида модели процесса, зависит от природы самого процесса и от решаемой задачи управления. Так, модель процесса можно задать в виде таблицы, связывающей входные и выходные переменные, описать функциональными зависимостями, дифференциальными или разностными уравнениями, передаточными функциями и т.п. В каждом случае методы получения математического описания оказываются различными. Однако различие методов идентификации этим не исчерпывается.
Кроме того, методы идентификации объектов и систем различаются в зависимости от наличия той или иной априорной информации о процессе, а также делятся на активные и пассивные. Активные методы идентификации основаны на постановке специальных заранее спланированных экспериментов, позволяющих проводить целенаправленное изучение исследуемых свойств процесса. Пассивные методы предполагают изучение объекта в режиме нормальной работы. При этом увеличивается время, необходимое для сбора экспериментальных данных, достаточных для построения адекватной модели процесса, однако снижаются затраты на проведение эксперимента. Кроме того, при применении пассивных методов возможно использовать архивный материал.
Для управления объектом необходимо знать, как влияет то или иное входное воздействие, управляющее процессом, на выходную переменную, характеризующую его протекание. Таким образом, идентификация процесса сводится к построению математического описания зависимости между этими величинами, которое состоит из двух этапов. Первоначально необходимо определить характер искомой зависимости и вид ее математического описания, а затем найти конкретные значения параметров такого описания. Первый этап обычно называется структурной идентификацией, а второй – параметрической.
18
Исходными данными для построения математической модели объекта могут служить как теоретические представления о природе физических явлений, происходящих при протекании этого процесса, так и экспериментально измеряемые зависимости между входными и выходными переменными.
На этапе проектирования процедура идентификации сводится к разработке эталонной модели на основе «идеальных» процессов. Исходя из этого при идентификации объекта целесообразно комплексное использование всей имеющейся информации о процессе, причем теоретические представления следует относить к структурной идентификации. При этом оцениваются динамические свойства процесса, его линейность, стационарность и др., на которых основывается выбор вида математического описания. В качестве экспериментальных данных используются «идеальные» процессы.
На этапе эксплуатации УС РВ модель-эталон уточняется с учетом как режима функционирования, так и неизбежных процессов изменения параметров объекта управления.
Идентификация в реальном масштабе времени дает возможность осуществлять функциональную диагностику объекта, датчиков, исполнительных устройств и других подсистем УС РВ. Более того, при этом появляется возможность увеличить живучесть каналов непосредственного цифрового управления путем дублирования неисправных каналов соответствующими каналами настраиваемой модели.
Вадаптивных УС РВ, построенных на базе адаптивных алгоритмов с идентификатором, используется настраиваемая модель процесса
иидентификатор статических или динамических характеристик по каналу основного возмущения.
Винвариантных адаптивных системах с эталонной моделью используется идентификатор динамических характеристик объекта по каналу управления, работающий в реальном масштабе времени, а устройство адаптации может работать как в реальном масштабе времени, так
ив супервизорном режиме.
Идентификатор необходим для работы оптимальных систем управления нестационарными динамическими технологическими процессами, использующими наблюдатели состояния. В этих системах можно применять оценки фазовых координат объекта, получаемые с помощью наблюдателя состояния, для идентификации параметров объекта управления.
19
Рассмотрим требования, которым должны удовлетворять все рассмотренные применения идентификатора. Идентификатор должен давать точные оценки параметров в установившемся режиме, хотя требования к точности идентификации сильно отличаются в зависимости от конкретных приложений. Более того, требуемая точность зависит от степени влияния параметра на величину оптимизируемого функционала.
Сэтой точки зрения высокая точность идентификации требуется
взадачах статической оптимизации с использованием прогнозирующей модели. Однако не всегда следует стремиться к полной компенсации влияния того или иного параметра объекта управления на эффективность системы управления. Ясно, что параметры, слабо влияющие на качество адаптивного управления, можно не идентифицировать, что позволяет упростить структуру настраиваемой модели иалгоритмы идентификации.
Алгоритмы идентификации отличаются и по характеру сходимости оценок параметров. Большое число методов идентификации, дающих хорошие результаты при достаточно малых отклонениях начальных значений параметров от «истинных» значений, не обеспечивает сходимости оценок при больших начальных параметрических рассогласованиях. Это тем более важно, что не во всех указанных применениях идентификатора можно использовать такой прием улучшения сходимости алгоритмов идентификации, как повторная прогонка массива обрабатываемых данных с начальными условиями, полученными на предшествующем цикле.
Теория идентификации на сегодняшний день представляет большое количество методов. Однако методы теории идентификации довольно сложны. Также многие методы исследования имеют свои ограничения, что заставляет в практике проектирования адаптивных систем управления использовать комбинацию различных методов.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Сформулируйте требования к управляющим системам реального времени.
2.Является ли системой реального времени АРМ – автоматизированное рабочее место проектировщика (конструктора)?
3.Является ли системой реального времени САПР – система автоматизированного проектирования?
4.Является ли системой реального времени система дистанционного обучения?
20