

книги / САПР изделий из композиционных материалов. Моделирование процессов деформирования и разрушения в среде ANSYS
.pdfнить последовательный анализ связанных задач. Это также позволяет решать задачи индукционного перемешивания и вычисления напряжений в процессе тепломассопереноса. Наличие элементов для гидроаэродинамического анализа дает возможность выполнить вслед за таким анализом прочностной или тепловой расчет. Сначала можно найти характеристики конвективного поведения среды, а затем выполнить подробный тепловой анализ конструкции, используя результаты предыдущего анализа в качестве граничных условий. Пользователи программы ANSYS имеют возможность учесть наличие магнитных сил Лоренца и джоулева тепла в расчете параметров движения сплошной среды.
Имеется также возможность рассматривать взаимодействие движущихся потоков сплошной среды и жестких поверхностей конструкции или сооружения. Конечные элементы в гидродинамическом анализе можно использовать для определения механических и тепловых нагрузок, обусловленных движением среды. К прочностной модели можно приложить механические силы, полученные на этапе гидродинамиче- ского анализа, и найти соответствующие деформации и напряжения. Затем можно учесть деформации конструктивных элементов и повторить расчет параметров движения среды для новой геометрии. Итерационный процесс заканчивается, когда достигнута сходимость решения. Этот многообещающий подход перспективен для анализа поведения устройств, работающих при совместном действии гидродинамических и механических нагрузок, таких как увлажнители пульсирующего типа, крылья летательных аппаратов и искусственные сердечные клапаны.
При наличии средств многокомпонентного анализа пользователь имеет возможность отслеживать движение совокупности отдельных потоков, каждый из которых обладает индивидуальными свойствами. Это позволяет оценить эффективность смесителей разной геометрии для жидкостей с сильно различающимися коэффициентами диффузии. Характеристики потоков, переносящих эти разновидности компонентов, могут быть либо независимыми от их свойств, либо являться функциями этих свойств.
Пользователь может учесть влияние на параметры потока таких объектов, для которых нельзя ограничиться только моделированием геометрии. Это могут быть либо некоторые препятствия, затрудняющие движение среды (распределенные сопротивления), либо, наоборот, устройства, ускоряющие поток (например, вентиляторы). Примером распределенного
111
сопротивления может служить решетка в потоке. Сопротивление может быть задано в форме К-фактора, коэффициента трения или проницаемости. Возможность ввести в расчетную модель вентилятор является средством, позволяющим пользователю учесть действие охлаждающего вентилятора или насоса в потоке. Численное моделирование возможно как для полностью замкнутых областей (например, при расчете параметров потоков внутри холодильника), так и для полностью открытых (в случае потоков, которые проходят через охлаждающую систему холодильника и затем удаляются).
Задавать значения плотности, коэффициента теплопроводности и вязкости можно в табличной форме. Плотность можно ввести только как функцию давления.
При работе с программой ANSYS/FLOTRAN предусмотрена возможность осуществлять рестарт модуля FLOTRAN, а также использовать опцию создания рестартового файла для гидроаэродинамического анализа, что сокращает затраты времени для больших моделей.
Пакет ANSYS/FLOTRAN предоставляет средства учета ортотропной проводимости для областей расчетной модели, отображающих твердое тело. Это дает возможность выполнять анализ для композитных материалов, состоящих из волокон, ориентированных в разных направлениях и имеющих разные свойства; например, выполнить анализ теплообменника из стекловолокна.
Имеется автоматический построитель двумерной сетки мелкого размера, ориентированной вдоль некоторой границы, обеспечивающий чрезвычайно резкое укрупнение сетки (в 1000−10000 раз) по нормали к границе. Это дает возможность получить наиболее подходящую сетку и управлять ее качеством. Иметь такое средство весьма удобно при выполнении таких сложных видов анализа, как гидродинамический или электромагнитный, но оно приемлемо для любого анализа. Наличие автоматического построителя послойной сетки позволяет пользователю создавать высококачественную сетку, ориентированную вдоль некоторой преграды, и использовать ее в расчете параметров движения сплошной среды. Пользователь найдет такую возможность полезной при моделировании сложных в геометрическом отношении областей течения сплошной среды, для которых разделение расчетной модели на отдельные части и построение упорядоченной сетки вручную является весьма трудоемким.
112
Движение среды в трубопроводах
Анализом движения сплошных сред в трубопроводах устанавливаются значения давления, скоростей и параметры теплообмена в таких замкнутых системах, как, например, в охлаждающей системе автомобиля. Этот вид анализа пригоден для любых систем с постоянной скоростью потока несжимаемой жидкости.
Конечноэлементная формулировка течения жидкости в трубопроводе имеет следующий вид:
CT 0 T ′ +0
0 0
KT 00 KP
|
|
|
|
G |
|
|
|
|
|
|
|
|
T |
|
Q |
|
Q |
|
= |
+ |
|||
|
|
|
|
|
|
|
P |
W |
H |
||
|
|
|
|
|
|
, (4.22)
ãäå ÑT − матрица удельных теплоемкостей; T − вектор узловых температур; T ' − вектор производных по времени вектора узловых температур; Ð − вектор узловых давлений; KT − матрица теплопроводности с учетом конвекции и массопереноса; KP − матрица давлений; Q − вектор узловых тепловых потоков; W − вектор узловых массовых потоков; QG − вектор внутренних тепловых источников; H − вектор сил тяжести и эффектов перекачивания (вектор гидравлического напора).
Âтом случае, когда интерес представляют только скорость потока
èдавление, в формулировке проблемы можно пренебречь компонентами температуры. Задача движения сплошной среды в трубопроводах является нелинейной, так как матрица теплопроводности меняется вместе с изменением перепада давления. Поэтому в программе ANSYS решение для скорости потока и градиентов температуры находится посредством итераций, и матрица теплопроводности обновляется на каждой итерации в соответствии с новым перепадом давления. Процесс итераций продолжается до тех пор, пока не достигается установленный критерий сходимости в пределах числа итераций, указанных пользователем.
Âрезультате решения получают давление в каждом узле и расход рабочего тела для каждого конечного элемента. Средствами постпроцессора можно получить графические представления для давлений, скорости потока и распределения температуры.
Кроме того, имеется возможность использовать терможидкостной трубчатый конечный элемент совместно с трехмерным конечным элементом пограничного слоя, для того чтобы моделировать воздействие
113
потока газа или жидкости (включая конвективный теплообмен) на поверхность твердых тел. Так, например, с помощью указанных конечных элементов можно моделировать влияние на температурное поле вращающихся турбинных лопаток потока воздуха, проходящего через них.

ГЛАВА 5 ТИПЫ СИСТЕМ КООРДИНАТ
В программе ANSYS предусмотрено несколько типов систем координат (СК, CS*), каждый из которых используется по различному назначению:
–глобальные и локальные системы координат для позиционирования
âпространстве объектов геометрической и сеточной моделей;
–дисплейная система координат для отображения на экране объектов геометрической и сеточной моделей;
–узловая система координат для изменения ориентации степеней
свободы (DOF**) в узлах (например, связать с направлением нормали к поверхности) и интерпретации результатов расчета в этой системе координат (Nodal Solution);
–элементная система координат определяет ориентацию материальных свойств (анизотропию) и интерпретацию результатов расчета в этой системе координат (Element Solution);
–система координат представления результатов используется для преобразования результатов расчета к специфической системе координат для распечаток, отображения на экране или операций обработки результатов в основном постпроцессоре (POST1);
–рабочая плоскость (WP – Work Plane) используется для позиционирования в пространстве геометрических примитивов, рассечения объектов и других операций в процессе геометрического проектирования.
5.1.Глобальные системы координат
Âпрограмме ANSYS предопределены три глобальных системы координат: декартова (по умолчанию), цилиндрическая и сферическая
*Coordinate System.
**Degrees of Freedom.
115
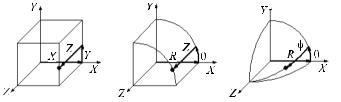
(рис. 5.1). Все системы координат «правые», т.е. положительное направление по угловой координате отсчитывается против часовой стрелки, при этом третья ось координат Z по правилам «правой» триады направлена к зрителю. Все глобальные системы координат совместно используют
Рис. 5.1. Глобальные системы координат
одно и то же начало координат. Все системы координат имеют уникальные номера, причем первые одиннадцать (с ¹ 0 по ¹ 10) зарезервированы, в частности 0 – декартова глобальная СК (Cartesian CS), 1 – цилиндрическая глобальная СК (Cylindrical CS), 2 – сферическая глобальная СК (Spherical CS). Создаваемым пользователем локальным (специфиче- ским) СК присваиваются произвольные номера, но не ниже 11.
5.2. Локальные системы координат
Зачастую возникает необходимость установить собственную систему координат, у которой начало координат смещено от центра глобальной СК или отличается ориентация осей. Дисплейные, узловые, элементные СК, СК представления результатов формулируются в терминах локальных СК. Определяемые пользователем системы координат могут быть созданы следующими способами:
– в терминах глобальных декартовых координат:
Utility Menu WorkPlane
WorkPlane Local Coordinate Systems
Local Coordinate Systems Create Local CS
Create Local CS  At Specified Loc (команда LOCAL);
At Specified Loc (команда LOCAL);
– в терминах узлов сеточной модели:
Utility Menu WorkPlane
WorkPlane Local Coordinate Systems
Local Coordinate Systems Create Local CS
Create Local CS  By 3 Nodes (команда CS);
By 3 Nodes (команда CS);
– в терминах ключевых точек:
Utility Menu WorkPlane
WorkPlane Local Coordinate Systems
Local Coordinate Systems Create Local CS
Create Local CS  By 3 Keypoints (команда CSKP);
By 3 Keypoints (команда CSKP);
116
– центрированная в начале координат текущего положения WP:
Utility Menu WorkPlane
WorkPlane Local Coordinate Systems
Local Coordinate Systems Create Local CS
Create Local CS  At WP Origin (команда CSWPLA);
At WP Origin (команда CSWPLA);
– в терминах активной системы координат с помощью команды CLOCAL (эквивалентного меню в ГПИ не имеется).
Когда локальная система координат определена, она становится активной системой координат. Чтобы удалить локальную СК, используйте меню:
Utility Menu WorkPlane
WorkPlane Local Coordinate Systems
Local Coordinate Systems Delete Local CS
Delete Local CS
(команда CSDELE).
Для просмотра состояние всех глобальных и локальных систем координат используйте меню:
Utility Menu List
List  Other
Other  Local Coord Sys (команда CSLIST).
Local Coord Sys (команда CSLIST).
Все локальные системы координат могут быть декартовыми, цилиндрическими или сферическими. Обратите внимание, что вы можете определять локальные цилиндрические и сферические системы координат в круговой или эллиптической конфигурации. Дополнительно вы можете определить тороидальную локальную систему координат.
Примечание. Операции твердотельного моделирования в тороидальной системе координат не рекомендуются.
5.3. Активная система координат
Вы можете создать много систем координат, но только одна из этих систем может быть активна в данный момент. Первоначально активна глобальная декартова система (по умолчанию). Когда Вы создаете локальную систему координат, она автоматически становится активной. Если вы хотите активировать одну из глобальных, локальных систем координат или рабочую плоскость, используйте один из следующих пунктов меню (команда CSYS):
Utility Menu Change Active CS to
Change Active CS to  Global Cartesian, Utility Menu
Global Cartesian, Utility Menu Change Active CS to
Change Active CS to  Global Cylindrical, Utility Menu
Global Cylindrical, Utility Menu Change Active CS to
Change Active CS to  Global Spherical, Utility Menu
Global Spherical, Utility Menu Change Active CS to
Change Active CS to  Specified Coord Sys, Utility Menu
Specified Coord Sys, Utility Menu Change Active CS to
Change Active CS to  Working Plane.
Working Plane.
117
Вы можете активировать систему координат на любой стадии сеанса. В диалогах координаты маркируются как x–y–z независимо от типа активной системы координат. Если активная СК не является декартовой, вы должны сделать мысленные замены: R– –Z для цилиндрической СК и R–
–Z для цилиндрической СК и R– –φ – для сферической или тороидальной СК соответственно.
–φ – для сферической или тороидальной СК соответственно.
Угловые координаты по умолчанию задаются в градусах.
5.4. Поверхности постоянного уровня
Определение постоянного значения для отдельной координаты подразумевает поверхность. Например, x = 3 представляет плоскость Y–Z (или поверхность) в декартовой СК. Подразумеваемые поверхности используются с различными операциями отбора и перемещения объектов. Некоторые поверхности постоянного значения C показаны на рис. 5.2. Эти поверхности могут быть расположены в глобальных или локальных системах координат, чтобы учесть любую желательную ориентацию. Обратите внимание, что для поверхностей в эллиптических системах координат постоянное значение R (R = C) представляет значение R ïî îñè X.
5.5. Дисплейная система координат
По умолчанию списки узлов и ключевых точек всегда отражают их глобальные декартовы координаты, даже если они были определены в иной системе координат. Вы можете изменять дисплейную систему координат, используемую для распечаток списков узлов и ключевых точек и графического отображения, одним из следующих методов (команда DSYS):
Utility Menu  WorkPlane
WorkPlane  Change Display CS to
Change Display CS to  Global Cartesian, Utility Menu
Global Cartesian, Utility Menu  WorkPlane
WorkPlane  Change Display CS to
Change Display CS to  Global Cylindrical, Utility Menu
Global Cylindrical, Utility Menu  WorkPlane
WorkPlane  Change Display CS to
Change Display CS to  Global Spherical, Utility Menu
Global Spherical, Utility Menu WorkPlane
WorkPlane Change Display CS to
Change Display CS to Specified Coord Sys.
Specified Coord Sys.
Изменение дисплейной системы координат скажется на графиче- ском отображении. Если Вы не желаете неадекватного отображения узлов и ключевых точек, переустановите дисплейную систему координат к глобальной декартовой СК. На отображение линий, поверхностей и тел команда DSYS не распространяется.
118
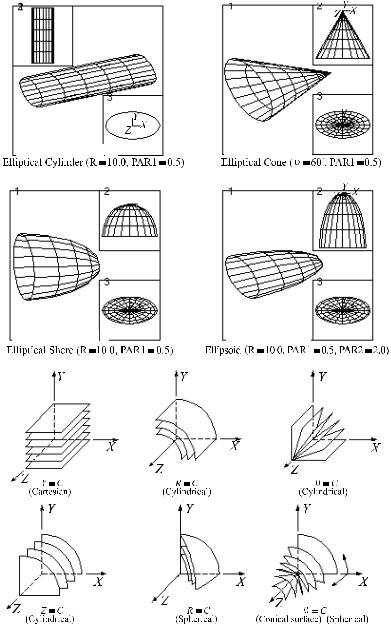
Рис. 5.2. Примеры поверхностей постоянного уровня
119
5.6. Узловые системы координат
Узловая система координат предназначена для изменения ориентации степеней свободы в узлах и интерпретации результатов расчета
âэтой системе координат. Каждый узел имеет собственную узловую систему координат, которая (по умолчанию) является параллельной глобальной декартовой СК (независимо от активной системы координат,
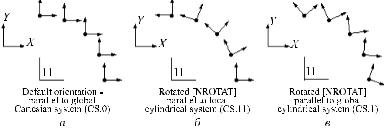
âкоторой узел был определен). Вы можете изменить ориентацию узловой системы координат в любом узле, используя один из следующих методов (рис. 5.3):
Рис. 5.3. Узловые системы координат
– преобразовать узловую систему координат в активную систему координат. Это означает, что ось X узловой СК становится параллельной оси X èëè R активной СК, ось Y узловой СК становится параллельной оси Y èëè θ активной СК, ось Z узловой СК становится параллельной Z èëè φ активной СК (команда NROTAT):
Main Menu  Preprocessor
Preprocessor  Create
Create  Nodes
Nodes  Rotate Node CS – To Active CS;
Rotate Node CS – To Active CS;
Main Menu Preprocessor
Preprocessor Move / Modify
Move / Modify Rotate Node CS – To Active CS;
Rotate Node CS – To Active CS;
– создать узловую систему координат по известным углам поворота. Вы можете определять углы ориентации осей узловой СК в процессе создания узла (команда N) или для существующих узлов (команда NMODIF):
Main Menu  Preprocessor
Preprocessor  Create
Create  Nodes
Nodes  In Active CS,
In Active CS,
Main Menu  Preprocessor
Preprocessor  Create
Create  Nodes
Nodes  Rotate Node CS – By Angles,
Rotate Node CS – By Angles,
Main Menu  Preprocessor
Preprocessor  Move / Modify
Move / Modify  Rotate Node CS – By Angles;
Rotate Node CS – By Angles;
120