

9 3D Digital Elevation Model Generation |
385 |
with the operator W () wrapping values into the range of −π ≤ ϕ ≤ π . M and N refer to the image size in two dimensions. To find the minimum in Eq. (9.16) is equivalent to solving the following system of linear equations:
(φi+1,j − 2φi,j + φi−1,j ) + (φi,j +1 − 2φi,j + φi,j −1) = ρi,j |
(9.18) |
||
where |
|
. |
|
ρi,j = i,jx − ix−1,j + i,jy − i,jy |
−1 |
(9.19) |
|
Equation (9.18) represents a discretized version of Poisson’s equation [121]. The LS problem can be formulated as the solution of the set of linear equations:
Aφ = ρ |
(9.20) |
where A is an MN × MN sparse matrix, vector ρ contains values of wrapped phase, and vectors φ is the unwrapped values to be estimated. Although LS based methods are computationally very efficient when they make use of Fast Fourier transform (FFT) techniques, they are not very accurate because local errors tend to spread without means of limitation [53].
In practice, it is hard to operate the phase unwrapping process in a totally automated fashion in spite of vast investigation and research in this aspect of InSAR [151]. Human interventions are always needed. Therefore, in order to improve automation, phase unwrapping remains an active research area.
9.3.2 Accuracy Analysis of DEMs Generated from InSAR
The accuracy of the final DEMs generated from InSAR may be affected by many factors from SAR instrument design to image analysis. The major problems can be summarized as follows [1].
1.Inaccurate knowledge of acquisition geometry.
2.Atmospheric or ionospheric delays.
3.Phase unwrapping errors.
4.Decorrelation on land use types (scattering composition or geometry) which increases phase noise in the interferogram.
5.Layover or shadowing, which may directly affect interferometry.
For InSAR operational conditions, a critical baseline was defined for choosing SAR image pairs to generate an interferogram [112]. The concept of the critical baseline was introduced to describe the maximum separation of the satellite orbits in the direction orthogonal to both the along-track (azimuth) and the across-track (slant). If the critical value is exceeded, it would not be expected to have clear phase fringes in the interferogram. Toutin and Gray [151] indicated that the optimum baseline is terrain dependent; moderate to large slopes can generate a phase that can be difficult to process in the phase unwrapping stage and a baseline between a third and a half of the critical baseline is good for DEM generation, if terrain slope is moderate.
386 |
H. Wei and M. Bartels |
The final elevation error can be propagated from each variable presented in Eqs. (9.8), (9.14) and (9.15), as a function of H , B, α, r , and r (i.e. phase difference ψ ). Based on geometric errors caused by H , B, α, r , and ψ , the related elevation error can be calculated by partially differentiating these functions [126], as shown in Eq. (9.21).
δhH = δH
δhB = −r tan(θ − α)(sin θ + cos θ tan τ ) |
δB |
||||||
|
|
||||||
B |
|||||||
δhα = r(sin θ + cos θ tan τ )δα |
(9.21) |
||||||
δhr = − cos θ δr |
|
|
|
|
|
||
δh |
ψ = |
4π r(sin θ + cos θ tan τ ) |
δψ |
||||
|
|||||||
|
λB cos(θ |
− |
α) |
|
|
|
|
|
|
|
|
|
|||
where τ is the terrain surface slope in the slant range direction. The overall elevation error can be a sum of the errors presented in Eq. (9.21). To rectify errors in Eqs. (9.21), a useful way to identify errors is from the following three aspects.
1.Random errors. These are errors randomly introduced in the DEM generation procedures, such as, electronic noise of SAR instruments and interferometric phase estimation error. They cannot be compensated by tie points, which are the corresponding points where their corrected ground positions are known. The random errors affect the precision of the InSAR system, while the following errors determine the elevation accuracy.
2.Geometric distortion. These include altitude errors, baseline errors, and SAR internal clock timing errors (or atmospheric delay). They are systematic errors that may be corrected by tie points.
3.Position errors. These errors include orbit errors and SAR processing azimuthlocation errors and may be removed by a simple vertical or horizontal shift in the topographical surface.
From the above discussion, it can be seen that the elevation accuracy of DEMs generated from InSAR is influenced by various factors. Atmospheric irregularities affect the quality of SAR images and induce errors in the interferogram phase. Terrain types also contribute to the accuracy as scattering composition and geometry. This can be seen from Eq. (9.21) where the terrain surface slope along the slant range direction makes contributions to a few original errors, such as the original baseline error and phase error. Theoretically the interferometric nature used in DEM generation from InSAR gives the height accuracy to the level of the SAR wavelength (i.e. millimeters to centimeters), which match the phase difference. However this is hard to achieve in practice due to the errors mentioned above and the uncertainty introduced by imaging geometry and atmospheric irregularities (especially for repeat-pass interferometry). It was reported that atmospheric effects on a repeatpass InSAR could induce significant variations in an interferogram of 0.3 to 2.3 phase cycles. For an ERS interferogram with a baseline of 100 m, elevation errors of up to about 100–200 m can be caused by the atmospheric effects on DEMs [70].

9 3D Digital Elevation Model Generation |
387 |
Quantitative validation of DEMs generated from InSAR needs ground truth for comparison, such as GCPs or DEMs generated by higher accuracy instruments. As with DEM generation from optical stereoscopic imagery, RMSE and standard deviation can be used as metrics in accuracy evaluation. Reported elevation accuracy for the SRTM7 data [82], created using C-band InSAR, was 2–25 m, with a significant variation depending on the terrain and ground cover types (i.e. vegetation). When vegetation is dense, InSAR does not provide good DEM results, while there is only sparse/low vegetation, the elevation accuracy can achieve 2 m. Horizontal resolution of SRTM SAR data is typically about 90 m for most areas, which is much worse than 2–20 m resolution of optical satellite images. ERS-1 and ERS-2 were exploited in DEM generation by Mora et al. [113], and the reconstructed DEMs were compared with those from SRTM InSAR in the same areas with maximum difference of 35–60 m and standard deviation of 3–11 m. Normally ±10 m elevation accuracy is expected from SRTM InSAR generated DEMs [123].
Due to difficulties in meeting the geometric requirement to the coherent conditions for two complex SAR images in interferometry, InSAR is not yet as popular as its counterpart of stereoscopic imagery in DEM generation [88]. In comparison with satellite stereoscopic imagery, the major advantage of InSAR is that it is independent from weather conditions—SAR illuminates its target with the emitted electromagnetic wave and the antenna receives the coherent radiation reflected from the target. In areas where optical sensors fail to provide data, such as heavy cloud areas, InSAR can be used as a complementary sensing mode for global DEM generation.
9.3.3 Examples of DEM Generation from InSAR
The first example presented in this section is a DEM from SRTM data [123]. The parameters of the interferometer are listed in Table 9.2.
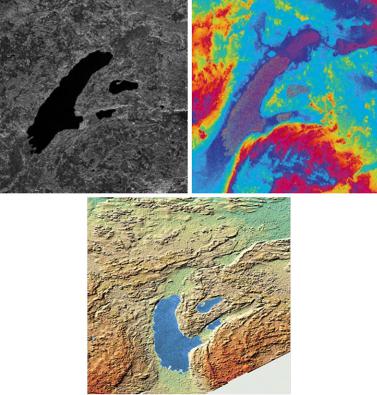
Figure 9.9 (top left) shows the magnitude (or amplitude) of SRTM raw data from the master antenna. The imaging area consists of 600 × 450 pixels. Each pixel of the image is a complex value of amplitude and phase as shown in Eq. (9.7). Figure 9.9 (top right) is the phase of the interferogram, and the reconstructed DEM is presented in Fig. 9.9 (bottom).
The processing of the SRTM InSAR data to the DEM is split into two parts: the InSAR data processing part and the geocoding part. The first part covers the steps necessary to get from the sensor raw data to the unwrapped phase, while the second part deals with precise geometric transformation from the sensor domain to map the cartographic coordinate space.
7SRTM: Shuttle Radar Topography Mission aimed to obtain DEMs on a near global scale from 56◦ S to 60◦N.
388
Table 9.2 Important parameters of the SRTM SAR interferometer
|
H. Wei and M. Bartels |
Wavelength (cm) |
3.1 |
Range pixel spacing (m) |
13.3 |
Azimuth pixel spacing (m) |
4.33 |
Range bandwidth (MHz) |
9.5 |
Range sampling frequency (MHz) |
11.25 |
Effective baseline length (m) |
59.9 |
Baseline angle (degree) |
45 |
Look angle at scene center (degree) |
54.5 |
Orbit height (km) |
233 |
Slant range distance at scene center (km) |
392 |
Height ambiguity per 2π fringe (m) |
175 |
1.InSAR data processing steps.
a.SAR focusing. When the site was selected, the corresponding SAR images need to go through focusing process. The physical reason for SAR image defocusing is the occurrence of unknown fluctuations in the microwave path length between the antenna and the scene [115]. For SAR focusing, several algorithms exist, and in this example, the chirp scaling algorithm was selected [124].
b.Motion compensation. Oscillations from the mounting device of SAR equipment introduces distortion to images. The oscillations can be filtered in the received signals before performing azimuth focusing. The SAR image after focusing and motion compensation is shown in Fig. 9.9(top left).
c.Co-registration and interpolation. Due to the Earth’s curvature, different antenna positions and delays in the electronic components, the two images may both be shifted and stretched with respect to each other to the order of a couple of pixels. In this example, instead of correlation methods, the image registration was conducted solely from the baseline geometry that was measured by the instruments of Attitude and Orbit Determination Avionics.
d.Interferogram formation and filtering. The interferogram is formed by multiplication and subsequent weighted averaging of complex samples of the master and slave images. The average corresponds to 8 pixels in azimuth and 2 pixels in slant range. It has proved that this combination provides the best tradeoff between spatial resolution and height error.
e.Phase unwrapping. The phase unwrapping was produced by a version of the minimum cost flow algorithm [36] and the computational time for the phase unwrapping process took about 5 minutes (on a parallel computer) for moderate terrain to several hours for complicated fringe patterns in mountainous regions.
2.Geocoding steps.
a.The unwrapped phase image is converted into an irregular grid of geolocated points of height, latitude and longitude on the Earth’s surface using WGS84 as horizontal and vertical reference.
9 3D Digital Elevation Model Generation |
389 |
Fig. 9.9 InSAR generated DEM of Lake Ammer, Germany. Top left: Magnitude of raw data. Top right: Interferogram phase. Bottom: DEMs from phase. Figure courtesy of [123]
b.The irregular grid is interpolated to a corresponding regular grid.
c.Slant range images are converted into their regular grid equivalents. The mapped DEM is demonstrated in Fig. 9.9(bottom).
The reconstructed DEM has horizontal accuracy, relative vertical accuracy, and absolute vertical accuracy of 20 m, 6 m and 16 m with LE90, respectively.
The second example is taken from a pair of ERS-1 SAR images of a mountainous region of Sardinia, Italy [37]. The image has 329 × 641 pixels. Figure 9.10(a) is the interferogram phase image, and Fig. 9.10(b) is the unwrapped phase image with the white points representing existing values. The phase unwrapping was done by a fast algorithm based on LS methods. It was claimed that the reconstructed DEM was in qualitative agreement with the elevation reported in geographic maps. Although the overall accuracy was not given because the published research was concentrated on the phase unwrapping algorithm, the computational time required for phase unwrapping process was achieved as 25 minutes on a Silicon Graphics Power Onyx RE2 machine for the mountainous region of Sardinia.