

Усе
.pdf2.Мобільної частини, у межах якої розв'язання неоднозначності вносяться
упрограмне забезпечення LGO (Leica).
Розбіжностями між режимами "кінематика" і "стій/йди", по-перше, є те, що під час мобільної частини в режимі "стій/йди" вимірювання стосуються тільки реальних точок на місцевості, а під час мобільної частини в режимі "кінематика"
вимірювання стосуються визначених моментів часу; по-друге, як уже зазначалось, у
режимі "кінематика" мобільний приймач рухається безперервно, а в режимі
"стій/йди" мобільний приймач зупиняється.
Ініціалізація та наступна за нею мобільна частина називаються ланками режиму "кінематика".
Ініціалізація – необхідний процес. Неоднозначності повинні бути розв'язані під час постопрацювання за допомогою програмного забезпечення SKI. Тільки після цього значення знайдених неоднозначностей будуть послідовно передаватися вперед за допомогою SKI у мобільну частину ланки.
Ініціалізація може бути виконана з використанням:
1.Режиму "швидка статика".
2.Встановлення станції на точці з відомими координатами.
Щоб досягти високоточних результатів визначень координат у режимі
"кінематика", необхідно виконувати вимірювання у максимально сприятливих вікнах розміщення супутників. У табл. 2 наводимо умови спостережень GPS у
режимі «Кінематики».
На мобільній ділянці ланки повинно спостерігатися не менше від чотирьох супутників. Якщо супутників менше ніж чотири, через втрату захоплення сигналу або розташування супутників програма LGO не може передавати вперед значення неоднозначностей, і ланка буде перервана.
Таблиця 2
Вибір вікон для спостережень у режимі "кінематика"
Вікно |
Кількість супутників, їхня висота |
|
|
над горизонтом, GDOP |
|
Добре вікно |
5 |
і більше супутників, |
|
висота за можливістю більше, ніж |
|
|
20°, GDOP< 5 |
|
Можна |
4 супутники, супутники вище ніж |
|
використовувати, |
15°, GDOP<8 |
|
але не |
|
|
рекомендується |
|
|
Не рекомендується |
4 |
супутники, GDOP> 8 |
використовувати |
|
|
Використовувати |
3 |
супутники або менше |
не можна |
|
|
Значення GDOP не повинне перевищувати 8, якщо результати за точністю мають досягати значень, зазначених у технічних характеристиках. Бажано, щоб значення GDOP дорівнювало або було менше за 5.

Мережі базових станцій RTK – різні способи формування поправок
Вище були розглянути переваги від використання мереж базових станцій RTK в порівнянні з одиночною базовою станцією з економічної точки зору.
Тепер ми зупинимося на описі чотирьох різних способів формування мережевих RTK-
поправок: MAX, i-MAX, FKP та VRS.
Існує різниця між цими способами і, отже, між якістю одержуваних RTK-розв’язків. Раніше була розглянута роль сервера мережі – збір супутникових спостережень від всіх базових станцій і трансляція RTK-поправок користувачу з ровером (Мал. 7).
Мал. 7 - Роль сервера в мережі RTK
Керування роботою сервера мережі здійснює Провайдер мережі базових станцій, який оформляє підписки користувачів для користування мережею, Провайдер вибирає спосіб формування RTK-поправок з огляду на потреби користувачів.
І цей вибір докорінно впливає на якість одержуваного RTK-рішення і точність визначення власних координат ровером.
Оцінивши спосіб MAX (заснований на стандарті мережі RTK, RTCM V3.1 Master Auxiliary Concept – MAC), як кращий на ринку сьогодні, пояснимо, чому користувачеві слід запитувати поправки типу MAX у провайдера мережі базових станцій. В наступному розділі аналізується інформація для того, щоби показати, що комбінуючи MAX технологію та SmartRTK (реалізовано в роверах виробництва Leica) користувач отримає кращий RTKрозв’язок, що наявний на ринку
.
Критерії оцінки способу формування RTK-поправок?
Як тільки сервер мережі RTK отримує вимірювання з усіх базових станцій, він зводить їх до так званого «загального рівня невизначеності». Ця операція виконується за допомогою спеціальних алгоритмів програмного забезпечення сервера мережі.
Після визначення «загального рівня невизначеності», програмне забезпечення сервера застосовує метод формування RTK-поправок (наприклад, MAX) для ровера.
Всі методи RTK мають властивість зменшувати помилки, що залежать від відстані, і, отже дозволяють збільшити можливу відстань між базовою станцією і ровером (тобто довжину базових ліній), хоча, в кожному методі, це досягається різними шляхами. Щоби оцінити різницю в методах формування поправок, визначимо декілька критеріїв.
Стандартизація методів
Методи формування RTK поправок можуть бути розділені на стандартизовані і нестандартизовані. У першому випадку, програмне забезпечення сервера використовує стандартизовані міжнародним співтовариством алгоритми, для генерування мережевих RTK-поправок. Ці алгоритми опубліковані і доступні для вивчення будь-якій людині. Таким чином, забезпечується прозорість алгоритмів для будь-якого користувача. Це означає, що інформація, що отримується роверами від мережі, не залежить від виробника устаткування і відповідає чітко визначеним міжнародним стандартам.
Нестандартизовані методи використовують закриті (пропрієтарні), неопубліковані алгоритми, які формують мережеві RTK-поправки.
Контроль ровером над мережевим розв’язком
Мета RTK мережі базових станцій – зменшення помилки, що залежать від відстаней, отримати оптимальний RTK-розв’язок і підвищити швидкість ініціалізації ровера на великому віддаленні від базових станцій. Залежно від способу, що використовується обчисленнями при мережевому рішенні керують або сервер або ровер.
Якщо ровер здатний обирати, дані яких базових станцій будуть використані для отримання рішення, яка кількість станцій і яку методику використовувати для зменшення помилок, буде отриманий розв’язок, керований ровером. Перевага такого підходу полягає в тому, що ровер може постійно оцінювати точність отриманого RTK-розв’язку і стежити за ефективністю диференціальної корекції. Якщо алгоритм ровера вважає, що рішення не є оптимальним (наприклад, через зміни атмосферних умов) він може виконати ініціалізацію «в польоті», обрати іншу стратегію корекції і отримати більш досконалий мережевий розв’язок. І, отже, отримати оптимальний RTK-розв’язок.
У випадку, якщо сервер керує мережевим розв’язком, він використовує одну стратегію для всіх користувачів, оптимальну для мережі, але не для окремого ровера. Серверу невідомо, в яких умовах працює кожний ровер, отже, якщо мережеве рішення не підходить для якогось ровера, RTK-розв’язок може бути не оптимальним і швидка ініціалізація може не бути виконана.
Щоб гарантовано виконувати швидку ініціалізацію і забезпечувати оптимізацію RTKрозв’язку, ровер повинен бути здатним керувати RTK-розв’язком.
Максимальне використання усіх супутникових даних
Мережеві RTK-сервери збирають супутникові дані від усіх базових станцій і генерують RTKпоправки, що відправляються на роверні приймачі. Проте деякі методи використовують ці дані не максимально повно. В деяких випадках це може означати різницю між можливістю розрахунку RTK-рішення або відсутність такої можливості.
Наприклад, нехай геодезист знаходиться в полі і на своєму роверному приймачі спостерігає 8 супутників. Він чекає, що його приймач може швидко ініціалізуватися. Проте, на одній з базових станцій, що використовуються для отримання RTK поправок, спостерігається тільки 5 супутників з цих 8-ми. В цьому випадку деякі мережеві RTK-методи можуть генерувати RTK-поправки тільки для 5 загальних супутників або повинні виключити одну референцну станцію з рішення і, в результаті, ослабити рішення. Таким чином роверний приймач може не отримати достатню кількість даних для швидкої ініціалізації і геодезистові, залишається чекати ініціалізації в полі.
Геодезист може мати кращий приймач на ринку, але не реалізувати його можливостей, обмежуючись такими, що приймаються RTK-поправками. Це швидше схоже на купівлю останньої моделі телевізора високої чіткості, щоб дивитися старі відео формату VHS.
Для збільшення можливостей ровера розраховувати RTK-рішення, метод мережевого RTK повинен максимально використовувати всі наявні супутникові дані.
Простежуваність та повторюваність
Простежуваність (traceability) - це загальноприйнятий у всьому світі термін системи контролю якості , в тому числі і серед геодезистів, що виконують вимірювання і зйомки. Це означає, що всі вимірювання за вимогами нормативних документів повинні бути зроблені відносно фізично існуючих точок (пунктів). Також завжди повинна залишатися можливість зробити ці виміри знову, тобто безпосередньо повторити їх. Наприклад, одиночна базисна лінія (dX, dY, dZ) між базовою станцією і вимірюваної точкою повинна мати можливість бути виміряна повторно. Для цього необхідно щоби станція і точка були фізично закріплені (наприклад, за допомогою пілона або кілка), що означатиме, що походження вимірів базисної лінії може бути простежена. Отже, будь-які вектори, виміряні за допомогою методу RTK в мережах базових станцій RTN повинні простежуватися і бути здатними повторитися.
Узгодженість
При роботі з одиночної базовою станцією точність визначення координат ровера в реальному часу знижується по мірі віддалення від базової станції. При мережевому RTK цей ефект значно зменшується. Отже, положення і точність його визначення будуть більш узгодженими (однорідними) в межах всього району робіт (звичайно при цьому обов’язкові до виконання вимоги керівництв з ГНСС знімань відносно кількості супутників, DOP та ін.).
Перш ніж перейти до опису різних методів формування мережевих поправок, розглянемо взаємодію сервера і ровера. Ця взаємодія визначає головні відмінності методів.
1
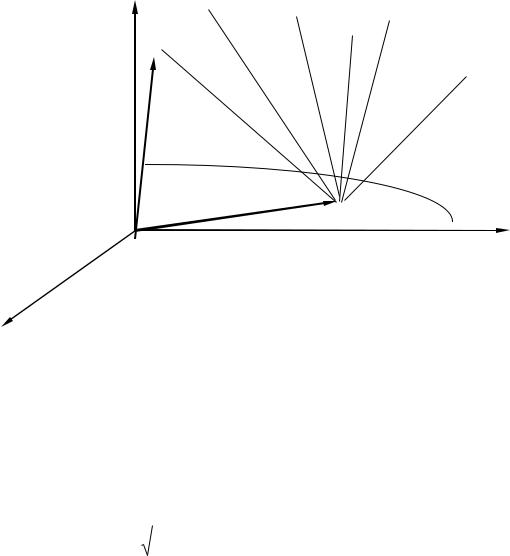
МОДЕЛІ ВИЗНАЧЕННЯ КООРДИНАТ ПУНКТІВ 2.1. Визначення координат пункту та поправки годинника приймача за виміряними псевдовідстанями (абсолютний спосіб)
З основного рівняння космічної геодезії для топоцентричного радіуса-вектора супутника r' запишемо:
r' = r - R , |
(2.1) |
де r і R - геоцентричні радіуси-вектори супутника і пункту спостереження, відповідно.
Z |
s2 |
s3 |
|
|
|
s5 |
|
|
s4 |
|
|
||
|
s1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
r3 |
r4 |
|
s6 |
|
|
|
|
|
|
r5 |
|
|
r1 |
|
|
|
|
r6 |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
Y |
|
|
|
|
|
||
|
|
|
|
|
|
|
X Рис. 2.1. Схема абсолютного визначення координат пункту.
Відомо, що псевдовідстань - це модуль топоцентричного радіуса-вектора супутника |r'|, збільшений або зменшений (в залежності від знаку ) на величину добутку швидкості світла с та різниці поправок годинників супутників і приймача , а саме:
|
|
|
|
|
= r' + c , |
|
|
(2.2) |
|||||
або |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c . |
|
|
(2.3) |
||||
|
|
|
|
|
|
r R |
|
|
|||||
Через координати i-го супутника |
r, x , y , z та пункту R{X, Y, Z} вираз (2.3) прийме |
||||||||||||
|
|
|
|
i |
i i i |
|
|
|
|
|
|
||
наступний вигляд: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
i |
|
xi X |
2 |
yi Y |
2 |
zi |
Z 2 c , |
(2.4) |
||||
Рівняння похибок для врівноважування координат пункту та поправки часу |
|
||||||||||||
запишемо як |
|
|
|
|
|
|
|
|
|
|
|
|
|
i X i Y |
i Z i |
i |
v |
, для i = 1, 2, ..., n , |
(2.5) |
||||||||
X |
Y |
Z |
|
|
i |
|
|
|
|||||
|
|
|
|
|
|
||||||||
де X, Y, Y i - відповідно поправки до координат пункту і до показів часу годинника приймача, vi - похибки, i - різниця між виміряною та обчисленою псевдовідстанню до i-го супутника, n - кількість виміряних псевдовідстаней (n 4). В рівнянні похибок (2.5) позначимо часткові похідні та вільний член рівняння відповідно через ai, bi, ci, di та li, і перепишемо його у звичному вигляді
ai X bi Y ci Z di li vi , для i = 1, 2, ..., n , (2.5')

2
Відзначимо, що в (2.5 ) порядок величин ai, bi, ci значно менший від порядку коефіцієнта di. При обчисленнях це приводить до великих похибок заокруглень і, відповідно, до зниження точності визначуваних параметрів, тобто поправок X, Y, Z i . Виходячи з цього, будемо шукати не саму поправку годинника приймача , а поправку її добутку на швидкість світла (c = 299792458 км/с), а саме t = c . Таким чином, визначаємо систематичну похибку геометричних відстаней від супутника до антени приймача, викликану похибкою годинника приймача, яка і перетворює відстані у псевдовідстані. Враховуючи вищезазначене, коефіцієнти та вільний член рівнянь похибок (2.5') будемо обчислювати за наступними формулами:
ai xi X 0
i
i обч.
; b |
yi Y 0 |
; |
c |
zi Z 0 |
||
i |
|
i |
|
i |
i |
|
|
|
|
|
|
||
|
li i вим. i обч. , |
|
||||

 xi X 0 2 yi Y 0 2 zi Z 0 2
xi X 0 2 yi Y 0 2 zi Z 0 2
;di 1 ,
c ,
(2.6)
(2.7)
(2.8)
де X0, Y0,Z0 - наближені координати пункту, ( i)вим. - виміряна псевдовiдстань.
Система нормальних рівнянь. У випадку, коли кількість виміряних псевдовідстаней (одночасно спостережених супутників) більше чотирьох (n>4) маємо перевизначену систему рівнянь. Щоб отримати однозначний розв'язок цієї системи, застосовують метод найменших квадратів, для цього систему рівнянь похибок виду
(2.5') перетворюють у систему нормальних рівнянь, яка має наступний вигляд: |
|
aa X ab Y ac Z ad t al 0 ; |
|
ab X bb Y bc Z bd t bl 0 ; |
(2.9) |
ac X bc Y cc Z cd t cl 0 ; |
|
ad X bd Y cd Z dd t dl 0 . |
|
У матричному записі система рівняннь похибок (2.5 ) матиме такий вид: |
|
AX L V . |
(2.10) |
Цій системі відповідатиме система нормальних рівнянь |
|
AT AX AT L 0 , |
(2.11) |
де А – матриця коефіцієнтів рівнянь похибок, X, L і V – вектори, відповідно, невідомих, вільних членів і похибок, символ Т – означає транспонування.
2.2. Визначення вектора між двома пунктами 2.2.1. Основні положення відносного способу визначення координат пункту
Мета визначення відносного місцеположення полягає у обчисленні координат невідомої точки відносно відомої, яка в переважній більшості застосувань залишається нерухомою. Іншими словами, визначення відносного місцеположення спрямоване на обчислення вектора між двома точками, який часто називають базою.
bAB
A B
Рис. 2.2. Визначення відносного місцеположення.
На рис. 2.2 точка А позначає опорну точку, точка В – невідому, а bAB – вектор бази. Вводячи відповідні вектори місцеположення ХА та ХВ , можна утворити співвідношення
X B X A b AB , |
(2.12) |
а формула для компонентів вектора бази bAB матиме вигляд
3
X B
b AB YB
Z B
X A |
X AB |
|
||||
Y |
|
|
|
Y |
. |
(2.13) |
|
A |
|
|
AB |
|
|
Z |
|
|
Z |
|
|
|
|
|
A |
|
|
AB |
|
Математичні моделі фазових відстаней можна застосувати в аналогічний спосіб з однією лише різницею, яка полягає у включенні відомих координат опорної точки. Ці координати повинні бути подані в системі WGS-84; досить часто вони є наближеним розв’язком на базі вимірів кодових відстаней.
Визначення відносного місцеположення найбільш ефективне, якщо здійснюється одночасні спостереження (супутників) як в опорній, так і в невідомій точці. Одночасність означає співпадання міток часу спостережень. Припустивши, що у двох точках А та В здійснюються такі одночасні спостереження супутників j та k. Тоді можна утворити лінійні комбінації – одиничні, подвійні, потрійні різниці тощо. Переважна більшість програм обробки застосовує ці різницеві методи, тому їх базові математичні моделі наведені в наступних підрозділах.
2.2.2. Рівняння фази
Частота електромагнітного сигналу f, яким є сигнал GPS, виражається через швидкість розповсюдження електромагнітних хвиль у вакуумі (c = 299792458 м c-1) і довжину хвилі сигналу як
f |
|
c |
. |
(2.14) |
||
|
||||||
|
|
|
|
|
||
Крім того, миттєва колова частота f є похідною від фази по часу |
|
|||||
f |
|
d |
. |
(2.15) |
||
|
||||||
|
|
dt |
|
|||
Звідси фазу можна отримати інтегруванням частоти в інтервалі часу від моменту t0 до t
:
t |
|
f dt . |
(2.16) |
t0
Якщо прийняти початкове значення фази t0 0 , то після подолання відстані від супутника до приймача рівняння фази прийнятого сигналу прийме вид
|
|
|
|
|
|
f t |
|
. |
(2.17) |
|
||||
|
|
c |
|
|
Під час спострежень приймач GPS генерує сигнал такої ж частоти, як і у прийнятого супутникового сигналу, і шляхом інтерференції утворює різницю фаз цих
електромагнітних хвиль, яка є виміряною фазою Rs t . З врахуванням похибок годиннників супутника s і приймача R рівнянням фази на основі виразу (2.15) буде
Rs t s t R t f |
|
f |
, |
(2.18) |
|
c |
|||||
|
|
|
|
де позначено s R . Зазначимо, що у приймачі вимірюється тільки дробова
частка миттєвої фази биття несучої хвилі, а початкове ціле число N повних коливань, які укладаються у відстань між супутником та приймачем, невідоме. Якщо спостереження від початкового моменту продовжуються безперервно, то число N, яке
4
називається цілочисловою невизначеністю, залишається незмінним, і фаза биття несучої хвилі в епоху t буде дорівнювати
Rs t f |
|
f N . |
(2.19) |
|
c |
||||
|
|
|
Підставляючи формулу (2.12) у рівняння (2.17) і позначаючи через отримаємо рівняння фазових псевдовідстаней
ij t |
1 |
ij (t) Nij f j i j (t) , |
|
|
|||
|
|
Фij Rs ,
(2.20)
де – вимірювана фаза несучої хвилі, в циклах, – довжина хвилі, а ij (t) – геометрична відстань між супутником та пунктом спостережень. Незалежна від часу фазова неоднозначність N ij є цілим числом, і тому її часто називають цілочисловою фазовою невизначеністю або цілочисловою невідомою. Величина f j позначає частоту
сигналу супутника в циклах за секунду (тобто виражену в герцах), а |
ij (t) – |
об’єднаний зсув годинників на супутнику та в приймачі. |
|
Величина об’єднаного зсуву ij (t) поділяється на дві частини за формулою |
|
ij (t) j (t) i (t) , |
(2.21) |
де та частина, що пов’язана з супутником відома з рівняння |
|
j (t) a0 a1 t t0 a2 t t0 2 , |
(2.22) |
де a0 , a1, a2 – три коефіцієнти полінома, які передаються за допомогою навігаційного повідомлення на опорну епоху t0 . Тому рівняння (2.22) дає можливість обчислити зсув супутникового годинника на епоху t . Невідомим в рівнянні (2.21) залишається член
i (t) , обумовлений приймачем.
Якщо рівняння (2.21) підставити у співвідношення (2.20), то модель фази набуває вигляду
ij (t) |
1 |
ij |
(t) Nij f j j |
(t) f j i (t) , |
(2.23) |
|
|
||||||
|
|
|
|
|
||
Припускаємо відомим зсув |
супутникового |
годинника j (t) |
(див. рівняння |
|||
(2.22)). Якщо кількість супутників становить n j , кількість епох – nt , то для окремого і кількість спостережень дорівнює n j nt . Кількості невідомих показані під відповідними членами правої частини наступного рівняння:
ij (t) f j j (t) |
1 |
ij |
(t) Nij f |
j i (t), |
||
|
||||||
|
|
|
|
(2.24) |
||
n j nt |
3 |
n j nt , |
||||
Розв’язання цього рівняння для окремої епохи (тобто nt 1) можливе лише за умови, що ми не звертаємо уваги на n j цілочислових невизначеностей. У цьому випадку
модель фазової відстані еквівалентна моделі кодової відстані і, отже, n j 4 . Отже
модель фази може бути використана для кінематичних застосувань, якщо неоднозначності отримати з початкових (наприклад, статичних) спостережень. Якщо знайти параметри неоднозначностей, то теоретично мінімальна кількість супутників
становить n j 2 . Це вимагає щонайменше nt 5 спостережних епох. Спостерігаючи
5
nt 4 супутників, можна отримати прийнятні результати. У цьому випадку потрібна кількість епох становить nt 3.
2.2.3. Обчислення різниць фаз.
Перші різниці. Розглянемо два пункти спостережень та один супутник. Позначаючи пункти як А та В, а супутник – як j і використовуючи рівняння (2.24), запишемо два рівняння фаз
Aj |
f |
j j (t) |
1 |
Aj |
(t) N Aj |
f j A (t), |
||||
|
||||||||||
|
|
|
|
|
|
|
|
(2.25) |
||
|
|
|
|
|
|
1 |
|
|
||
Bj f |
j j (t) |
|
Bj |
(t) N Bj |
f j B (t), |
|||||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||
різниця між якими виражається формулою |
|
|
|
|||||||
Bj (t) Aj (t) |
1 |
Bj (t) Aj (t) N Bj N Aj f j B (t) A (t) , (2.26) |
||||||||
|
|
|||||||||
|
|
|||||||||
Рівняння (2.26) називається рівнянням перших різниць. З цього рівняння випливає один важливий аспект розв’язування відносно невідомих у правій частині. Система таких рівнянь призведе до дефіциту рангу навіть у випадках будь-якої надмірності вимірювань. Це можна побачити з коефіцієнтів неоднозначностей та зсувів годинників приймачів. В обох випадках однаковими є абсолютні значення коефіцієнтів для двох пунктів. Це означає, що твірна матриця вирівнювання містить лінійно пропорційні стовпчики і має дефіцит рангу. Тому введемо відносні величини
N ABj N Bj N Aj , (2.27)
AB (t) B (t) A (t).
Додатково використовуючи скорочені позначення
ABj |
(t) Bj (t) Aj (t), |
||
ABj |
(t) Bj |
(t) Aj |
(2.28) |
(t), |
|||
і підставляючи рівняння (2.27) та (2.28) у співвідношення (2.26), отримаємо остаточну форму рівняння перших різниць:
ABj |
(t) |
1 |
ABj |
(t) N ABj |
f |
j AB (t) . |
(2.29) |
|
|
||||||||
|
|
|
|
|
|
|
У порівнянні з рівнянням (2.24) зсув супутникового годинника у цьому випадку зникає. Другі різниці. Припустимо, що ми маємо два пункти (А та В) і два супутники (j,
k). Відповідно до рівняння (2.29) можна утворити два рівняння для перших різниць:
ABj |
(t) |
1 |
ABj (t) N ABj |
j AB (t), |
|
|
|||||
|
|
|
(2.30) |
||
|
|
1 |
|
||
kAB |
(t) |
kAB (t) N ABk |
k AB (t). |
||
|
|||||
|
|
|
|
Для того щоб отримати другі різниці, віднімемо ці перші різниці. Припускаючи рівність частот f j f k , дістанемо в результаті
kAB (t) ABj |
(t) |
1 |
kAB (t) ABj |
(t) N ABk |
N ABj . |
(2.31) |
|
|
|||||||
|
|
|
|
|
|
Використаємо скорочені позначення для супутників j та k, як у рівнянні (2.28), отримаємо кінцеву форму рівняння других різниць:
ABjk |
(t) |
1 |
kAB (t) N ABk . |
(2.32) |
|
|
|||||
|
|
|
|