

648
.pdfПроверка по контактным напряжениям. Окружная скорость колёс
v = d1n1 / 60 000 = π·74,18·765,8 / 60 000 = 2,97 м/с.
Окончательно принята 8-я степень точности изготовления колёс [7]. Уточнены коэффициенты нагрузки: KHα = 1,07 и KFα = = 1,22 (табл. 10.1); при ψbd = 50 / 89,23 = 0,56 и симметричном расположении колёс KHβ = 1,01 и KFβ = 1,02 [7]; KHv = 1 и KFv = 1 [7]. Рабочее контактное напряжение
|
|
|
270 |
|
465,8 103 |
1,07 1,01 |
|
3,58 1 3 |
|
|
H |
|
|
|
|
|
|
||
170 3,58 |
|
|
45 |
|
|
||||
|
|
|
|
|
|
|
= 460 МПа < [500 МПа].
Вывод. Контактная прочность достаточна.
Силы в зацеплении. Окружное усилие
F |
2T |
2 136,7 |
103 |
3686 Н. |
|
1 |
|
|
|
||
|
74,18 |
|
|||
t |
d |
|
|
||
|
1 |
|
|
|
|
Радиальное усилие Fr = 3 686·tg20º/cos13,96º = 1 382 Н.
Осевое усилие Fa = 3 686·tg13,96º = 916 Н.
Эквивалентные числа зубьев и коэффициенты формы зуба: zv1 z1 /cos3 36/cos313,96 39; YF1 = 3,71 (табл. 10.3); zv2 z2 /cos3 129/cos313,96 141; YF2 = 3,61 (табл. 10.3).
Проверка по изгибным напряжениям. Коэффициент наклона зубьев
Y =1 – / 140 =1 – 13,96 / 140 = 0,9.
Рабочее изгибное напряжение шестерни – формула (10.21):
F1 = 3,71 · 0,9 · 3686 · 1,22 · 1,02 / (50 · 2) = 153 МПа < [400 МПа].
Рабочее изгибное напряжение колеса – формула (10.23):
F2 = F1b1 YF2 / (b2 YF1) = 153 · 50 · 3,61 / (45 · 3,71) = = 166 МПа < [250 МПа].
Вывод. Изгибная прочность достаточна.
Примечание. При необходимости уменьшения чисел зубьев колёс следует принять более высокий модуль m.
101

Расчёты на ЭВМ
В инженерных расчётах используется компьютерная система APM WIN MACHINE. Для расчёта передач применяют модуль TRANS (трансмиссия).
Пример 10.2. Рассчитать цилиндрическую косозубую передачу на ЭВМ по исходным данным примера 10.1: мощности на валах Р1 = 10,96 кВт; Р2 = 10,52 кВт; частоты вращения валов n1 = 765,8 об/мин, n2 = 215,7 об/мин, передаточное число u = 3,55; вращающие моменты на валах: Т1 = 136,7 Н м, Т2 = 465,8 Н м; допускаемые напряжения материала III группы: Н = 500 МПа,
F1 = 400 МПа, F2 = 250 МПа.
Решение.
Распечатка компьютерных данных приведена на рис. 10.3.
|
APM Trans |
|
|
|
Заданные параметры |
|
|
Передача : |
Косозубая внешнего зацепления |
||
Тип расчета : |
Проектировочный |
||
|
Основные данные |
|
|
|
|
|
|
Рабочий режим передачи |
|
|
Постоянный |
Термообработка колёс |
|
|
|
шестерня |
|
|
Цементация |
колесо |
|
|
Улучшение |
Расположение шестерни на валу |
|
Симметричное |
|
Нереверсивная передача |
|
|
|
Момент вращения на ведомом валу, Н м |
|
465.80 |
|
Частота вращения ведомого вала, об/мин |
|
215.70 |
|
Передаточное число |
|
|
3.55 |
Ресурс, час |
|
|
16000.00 |
Число зацеплений |
|
|
|
шестерня |
|
|
1 |
колесо |
|
|
1 |
Рис. 10.3. Распечатка параметров цилиндрической передачи (начало)
102
Результаты АPМ Trans
Основная геометрия
Описание |
Символ |
Шестерня |
|
Колесо |
|
Единицы |
|
|||||||
Межосевое расстояние |
aw |
|
|
170.000 |
|
|
|
|
мм |
|
||||
Модуль |
m |
|
|
2.000 |
|
|
|
|
мм |
|
||||
Угол наклона зубьев |
|
|
|
13.930 |
|
|
|
|
град. |
|
||||
Делительный диаметр |
d |
|
74.182 |
|
265.818 |
|
мм |
|
||||||
Основной диаметр |
db |
|
69.458 |
|
248.893 |
|
мм |
|
||||||
Начальный диаметр |
dw |
|
74.182 |
|
265.818 |
|
мм |
|
||||||
Диаметр вершин зубьев |
da |
|
78.182 |
|
269.818 |
|
мм |
|
||||||
Диаметр впадин |
df |
|
69.182 |
|
260.818 |
|
мм |
|
||||||
Коэффициент смещения |
x |
|
0.000 |
|
0.000 |
|
– |
|
||||||
Высота зубьев |
h |
|
4.500 |
|
4.500 |
|
мм |
|
||||||
Ширина зубчатого венца |
b |
|
87.000 |
|
81.000 |
|
мм |
|
||||||
Число зубьев |
z |
|
|
36 |
|
|
|
129 |
|
– |
|
|||
|
Свойства материалов |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
Описание |
|
|
Символ |
Шестерня |
|
|
Колесо |
Единицы |
|
|||||
Допускаемые напряжения изгиба |
Fa |
|
500.000 |
|
285.882 |
|
МПа |
|
||||||
Допускаемые контактные напря- |
Ha |
|
|
693.182 |
|
МПа |
|
|||||||
жения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Твёрдость рабочих поверхностей |
|
– |
|
60.0 |
|
27.0 |
|
HRC |
|
|||||
Действующие напряжения изгиба |
Fr |
|
63.512 |
|
61.946 |
|
МПа |
|
||||||
Действующие контактные напря- |
Hr |
|
|
403.027 |
|
МПа |
|
|||||||
жения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Силы в зацеплении |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
Описание |
|
|
Символ |
|
Шестерня |
|
Колесо |
Единицы |
|
|||||
Тангенциальная сила |
|
|
|
Ft |
|
|
3504.660 |
|
Н |
|
||||
Радиальная сила |
|
|
Fr |
|
|
1354.065 |
|
Н |
|
|||||
Осевая сила |
|
|
Fa |
|
|
869.263 |
|
Н |
|
|||||
Расстояние от торца колеса до |
|
|
B |
|
|
43.500 |
|
мм |
|
|||||
точки приложения силы |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Плечо силы |
|
|
|
R |
|
|
37.091 |
|
мм |
|
||||
Рис. 10.3. Распечатка параметров цилиндрической передачи (окончание)
Из распечатки видно, что результаты машинных и «ручных» расчётов практически не отличаются. По распечатке следует сделать основной вывод.
103
Вывод. Контактная и изгибная прочность достаточна.
Примечание. Отличие значений некоторых параметров при «ручных» и компьютерных расчётах связаны с тем, что программой выбраны материалы колёс с конкретными механическими характеристиками.
Конструирование зубчатых колёс
Конструктивные формы колёс определяются их размерами, видом производства и способом соединения с валом. Колёса не-
больших диаметров (до 150 мм) изготавливают обычно цельными цилиндрической формы из штампованных заготовок без углубле-
ний (рис. 10.4).
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
в |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
d |
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 0
0
Рис. 10.4. Колёса цилиндрической формы
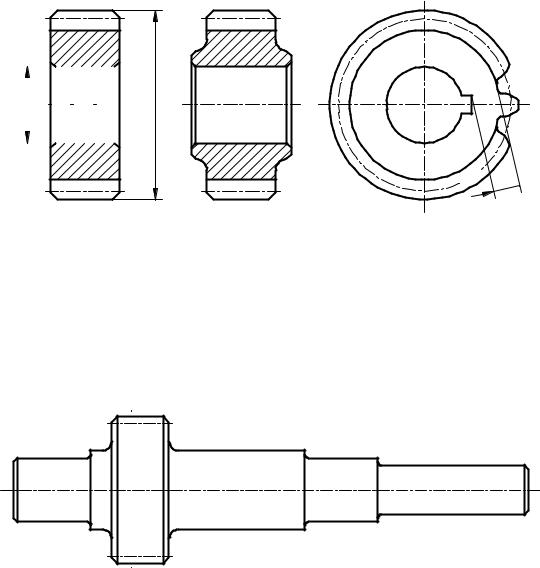
Зубчатый венец проектируется заодно с валом, образуя конструкцию вал-шестерня, если толщина обода в месте ослабления шпоночным пазом будет меньше δ0 = 2,5m, а также при высоких требованиях к точности центрирования колеса на валу (рис. 10.5). Обычно проектируют вал-шестерню при da /db = 2…2,5.
Рис. 10.5. Вал-шестерня цилиндрическая
104
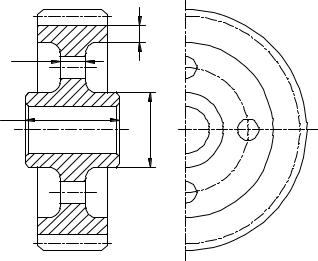
Колёса большого диаметра (до 500 мм) выполняют классической формы с углублениями и отверстиями (рис. 10.6). Колесо в этом случае включает в себя венец, со-
стоящий из зубьев и обода,
диск и ступицу.
Основные размеры колёс вычисляют по формулам:
длина ступицы
0 |
|
д |
lст |
ст |
d |
lст = (1,2…1,5) dв, (10.24) |
Рис. 10.6. Колесо с углублениями |
|
где dв – диаметр вала; |
|
|
диаметр ступицы колеса |
|
|
dст = (1,5…1,8) dв; |
(10.25) |
|
толщина обода |
|
|
о 2,5m + 2; |
(10.26) |
|
толщина диска |
|
|
д (0,2...0,3)b. |
(10.27) |
|
Порядок выполнения работы
1. По результатам лабораторной работы № 9 выписать исходные данные: мощности на валах Р1 и Р2 в кВт; частоты вращения валов n1 и n2 в об/мин, вращающие моменты на валах Т1 и Т2 в Н м, передаточное число u.
2.Принять направление зубьев, группу материалов, допускаемые изгибные F1, F2и контактные напряжения Н .
3.Вычертить кинематическую схему передачи (рис. 10.2).
4.Рассчитать ориентировочную окружную скорость и определить коэффициенты нагрузки.
5.Рассчитать межосевое расстояние по контактным напряжениям.
6.Рассчитать геометрические параметры передачи.
7.Рассчитать усилия в зацеплении.
8.Выполнить проверку зубьев на изгиб.
105
9.Сделать выводы о соответствии рабочих и допускаемых напряжений.
10.Выполнить расчёт передачи на ЭВМ.
11.Выполнить эскиз вала-шестерни или колеса (по указанию преподавателя).
Вопросы к защите работы
1.По каким критериям рассчитывалась зубчатая передача?
2.С какими видами отказов колёс связана методика расчёта?
3.Материалы какой группы приняты для колёс?
4.Какую роль играет модуль зацепления в изгибной прочности зубьев?
5.Какие силы действуют в зацеплении?
6.Какой смысл имеет коэффициент формы зуба?
7.Какая принята конструкция шестерни: вал-шестерня или насадная шестерня?
САМОСТОЯТЕЛЬНАЯ РАБОТА
Зубчатые передачи подразделяют на простые с неподвижными осями и планетарные (дифференциальные). Планетарная передача может содержать цилиндрические, конические и червячные колёса. В планетарной передаче есть закреплённое зубчатое колесо и колёса с подвижными осями. Планетарный принцип позволяет уменьшить массу и габариты редуктора за счёт многопоточной передачи мощности и внутреннего зацепления. С этим связаны отличия в расчёте планетарных и обычных зубчатых передач. При одинаковых материалах всех колёс рассчитывают внешнее зацепление как менее прочное по формуле
aw u 1 |
|
K |
2 T2pKH |
. |
(10.28) |
|
|
1 |
|
|
|||
|
a |
|||||
|
|
[ H ]u |
|
|
||
В формуле (10.28) используется передаточное число внешнего зацепления, равное u = z2 / z1 1 или u = z1 /z2 1, но не передаточное отношение планетарной передачи. Расчётный момент
определяют по формуле |
|
/ n , |
|
Т2р = Т2 |
Kc /nc = Т2 |
(10.29) |
|
|
|
c |
|
где Т2 – вращающий момент на колесе, Н·мм (колесо – звено с бóльшим числом зубьев), Kc – коэффициент неравномерности
106
распределения нагрузки между сателлитами, nc – число сателли- |
|||||||
тов, nc – приведенное число сателлитов. |
|
|
|
||||
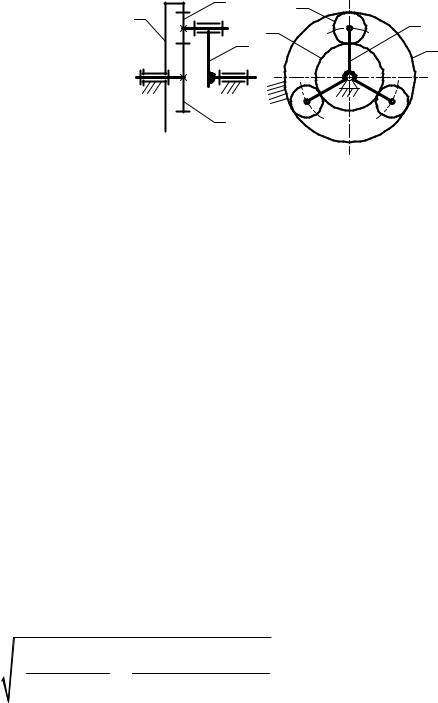
Наибольшее распространение получила схема простого пла- |
|||||||
нетарного редуктора (редуктора Джеймса) с числом сателлитов |
|||||||
nc = 3 (рис. 10.7). |
|
|
|
|
|
|
|
Пример 10.3. Рассчитать межосевое расстояние и модуль |
|||||||
простого планетарного редуктора. Вычертить кинематическую |
|||||||
схему редуктора. |
|
|
|
|
2 |
2 |
|
Исходные данные: мощ- |
3 |
|
h |
||||
|
|
||||||
|
|
1 |
|||||
ность Р1 = 10 кВт, частота вра- |
|
|
h |
3 |
|||
щения солнечного колеса |
n1 = |
|
|
|
|||
960 об/мин, числа зубьев |
z1 = |
|
|
|
|
|
|
18, z2 = 42, z3 = 112, число са- |
|
|
1 |
|
|
||
теллитов nc = 3, окружная ско- |
|
|
|
|
|||
рость v = 7 м/с, допускаемое |
|
|
|
|
|
||
контактное напряжение [ Н] = |
Рис. 10.7. Кинематическая схема |
||||||
450 МПа. |
|
|
простого планетарного редуктора |
||||
Решение. |
|
|
|
|
|
|
|
Кинематическая схема редуктора (рис. 10.7). |
|
||||||
Передаточное отношение i3 |
1 z |
3 |
/ z 1 112/18 7,22. |
||||
|
|
1h |
|
1 |
|
|
|
Передаточное число внешнего зацепления u = z2 /z1 = 42/18 = |
|||||||
= 2,33. Вращающий момент на солнечном колесе (шестерне |
|||||||
внешнего зацепления) |
|
|
|
|
|
|
|
Т1 = 9 550Р1/n1 = 9 550·10/960 = 99,5 Н·м = 99 500 Н·мм. |
|||||||
Приведенное число сателлитов nc |
= 2,3. Расчётный момент |
||||||
Т2р = Т1uη /nc = 99 500·2,33·0,96/2,3 = 96 766 Н·мм. Принята пря- |
|||||||
мозубая передача. Коэффициент ширины ψа = 0,25. Принята 8-я |
|||||||
степень точности изготовления колёс. Коэффициент концентра- |
|||||||
ции нагрузки КНβ = 1,1 [7] при несимметричном расположении ко- |
|||||||
лёс и твёрдости колеса Н2 < 350HB; коэффициент динамической |
|||||||
нагрузки КНv = 1,05 [7] при скорости v < 10 м/с. Межосевое рас- |
|||||||
стояние из расчёта внешнего зацепления z1 / z2 |
на выносливость по |
||||||
контактным напряжениям: |
|
|
|
|
|
|
|
|
315 |
2 |
96766 1,1 1,05 |
мм. |
|||
aw (2,33 1)3 |
|
|
0,25 |
114,2 |
|||
|
450 2,33 |
|
|
||||
|
|
|
|
|
|
|
107 |
Модуль зацепления
m |
2aw |
|
2 114,2 |
3,81 мм. |
z1 z2 |
|
|||
|
|
18 42 |
||
Принят по ГОСТ 9563 (табл. 1.1) m = 4 мм. Уточнённое межосевое расстояние
a = 0,5m(z1 + z2) = 0,5 · 4 · (18 + 42) = 120 мм.
Лабораторная работа № 11
КОНСТРУКЦИЯ И РАСЧЁТ КЛИНОРЕМЁННОЙ ПЕРЕДАЧИ
Цель работы: ознакомление с конструкциями шкивов и ремней клиноремённой передачи и выполнение расчёта клиноремённой передачи «вручную» и с использованием ЭВМ.
Оборудование и инструмент: модели и натурные детали клиноремённой передачи, ЭВМ.
|
Основные теоретические сведения |
|||
Основные исходные данные |
|
|||
известны |
из |
кинематического |
|
|
расчёта |
привода (лабораторная |
|
||
работа № 9) и содержат пара- |
1 |
|||
метры клиноремённой передачи |
2 |
|||
(первая ступень): мощности на |
|
|||
валах РI |
и PII |
в кВт, |
частоты |
|
вращения валов nI и nII |
в об/мин, |
|
||
вращающие моменты на валах ТI |
|
|||
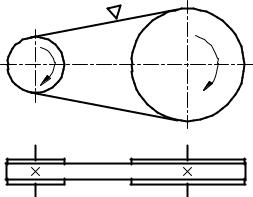
и TII в Н м, передаточное отношение u1. Кинематическая схема клиноремённой передачи приведена на рис. 11.1.
Основные критерии работоспособности и расчёта ремённых передач: тяговая способность и долговечность. Тяговая спо-
собность – комплексный критерий, учитывающий прочность материала ремня и его способность к сцеплению с материалом шкива. В ремённых передачах вращательное движение осуществляет-
108
ся за счёт натяжения ремня, сцепляющегося с обхватываемыми им шкивами.
По номограмме [7, с. 266] в зависимости от мощности РI и частоты вращения nI выбирают сечения ремня: Z, А, В, С, О, Е, ЕО, которые на графике имеют устаревшие русские обозначения: О, А, Б, В, Г, Д, Е. Угол профиля канавки шкивов обозначается . Угол сечения клинового ремня 0 = 40 .
Каждое сечение ремня имеет стандартизированные параметры [7]: расчётный диаметр малого шкива (по центру тяжести сечения) d1, мм; ширина расчётного сечения lp, мм; высота сечения T0, мм; площадь сечения А, мм2; масса 1 м ремня т, кг/м, и др. При этом при мощности Р 2 кВт принимают самое малое сечение Z (O по-старому).
Диаметр малого шкива необходимо принимать выше минимально допустимого на 2...4 размера из стандартного ряда. В противном случае не будет обеспечен нормативный ресурс, равный H0 = 5 000 ч при легком режиме (ПВ = 0,15) и Н0 = 2 000 ч при среднем режиме (ПВ = 0,25).
Диаметр большого шкива определяют по формуле
d2 = d1u, |
(11.1) |
округляют его до стандартного [7] и уточняют передаточное отношение:
u = d2 / d1(1 – s), |
(11.2) |
где s – скольжение в передаче; s = 0,01…0,02. Межосевое расстояние должно находиться в пределах:
|
|
|
0,55(d1 + d2) + T0 ≤ a ≤ d1 + d2. |
|
(11.3) |
||||
|
Предварительно межосевое расстояние а назначается из |
||||||||
табл. 11.1. |
|
|
|
|
|
Таблица 11.1 |
|||
|
|
|
|
|
|
|
|
||
|
|
Рекомендуемые значения межосевых расстояний |
|||||||
|
|
|
|
|
|
|
|
|
|
u |
|
1 |
2 |
3 |
4 |
|
5 |
|
6 |
a |
|
1,5d2 |
1,2d2 |
d2 |
0,95d2 |
|
0,9d2 |
|
0,85d2 |
Длину ремня определяют как сумму прямолинейных участков и дуг обхвата:
109

l 2a 0,5 (d |
|
d |
|
(d |
2 |
d )2 |
(11.4) |
|
2 |
) |
|
1 |
. |
||||
|
|
|
||||||
|
1 |
|
|
|
4a |
|
||
|
|
|
|
|
|
|
||
Полученное значение округляют до ближайшего стандартного Lp [7] и уточняют межосевое расстояние (без округления):
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
a |
(2L |
p |
(d |
|
d ) (2L |
p |
(d |
|
d ))2 |
8(d |
|
d )2 |
. (11.5) |
|||||
|
|
|
|
|||||||||||||||
8 |
|
|
2 |
1 |
|
|
|
|
2 |
1 |
|
|
2 |
1 |
|
|||
Угол обхвата малого шкива (должен быть 1 120°): |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
d2 |
d1 |
|
|
|
|
(11.6) |
||
|
|
|
|
|
|
180 |
57 |
|
|
|
|
. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
a |
|
|
|
|
|
Скорость ремня в м/с |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
v = πd1n1 / 60 000. |
|
|
|
|
(11.7) |
|||||||
Основным параметром, реализующим тяговую способность как главный критерий работоспособности, является Р0, кВт – мощность, допускаемая для передачи одним ремнем, принимаемая для типовой передачи в зависимости от различных параметров [7].
Реальные условия эксплуатации, отличные от типовых, корректируют рядом коэффициентов. Коэффициент угла обхвата
С = 1 – 0,003(180 – 1) . |
(11.8) |
Другие коэффициенты: учитывающий число ремней в передаче Сz; учитывающий влияние длины ремня СL и режима работы Сp принимают по [7]. Число ремней определяют из условия тяговой способности
|
|
PC |
p |
|
|
|
|
z |
|
1 |
|
|
. |
(11.9) |
|
PC C |
C |
|
|||||
|
z |
|
|||||
0 |
|
L |
|
|
|||
Число ремней не должно превышать z = 8. Предварительное натяжение каждой ветви клинового ремня
|
850PC |
C |
L |
|
|
F |
1 p |
|
mv2. |
(11.10) |
|
|
|
|
|||
0 |
zvC |
|
|
|
|
|
|
|
|
|
|
Сила, действующая на валы: |
|
|
|
|
|
Fr 2F0z sin( 1 /2). |
(11.11) |
||||
Рабочий ресурс передачи |
|
|
|
|
|
H y / max m 107 иLр / 3600vzш , |
(11.12) |
||||
110