

книги / Теория механизмов и механика систем машин
..pdf9. КОЛЕБАТЕЛЬНЫЕ ПРОЦЕССЫ В МЕХАНИЗМАХ
Поскольку в работающем механизме нагрузки на звенья непрерывно меняются даже при постоянных силах технологического сопротивления, то из-за упругости материалов звеньев они испытывают непрерывно изменяющиеся деформации, вызывающие их колебания. Эти колебания необходимо учитывать при динамических расчетах, так как фактор упругости значительно меняет и системы сил, воздействующих на звенья, и перемещения звеньев. Колебания звеньев в зависимости от их причин разделяют на четы-
ре группы: свободные, вынужденные, параметрические и автоколебания.
К свободным относят колебания, возникающие в механизме из-за импульсного внешнего силового воздействия. Особенностью свободных колебаний является то, что энергия для возбуждения колебаний вводится в систему извне, а их характер после внешнего воздействия определяется силами упругости. Для свободных колебаний характерно постоянство их амплитуды через определенный период времени Т (рис. 9.1, а). При действии силы, способствующей уменьшению амплитуды колебаний с течением времени (рис. 9.1, б), колебания затухают.
Колебания, вызванные действием внешних сил, изменяющихся по определенному закону, называют вынужденными, для них характерно протекание одновременно со свободными колебаниями (рис. 9.2). Амплитуда вынужденных колебаний меняется во времени, а при определенных условиях имеет тенденцию к неограниченному росту (резонансные колебания).
Рис. 9.1. Диаграммы свободных колебаний звеньев: |
Рис. 9.2. Диаграмма вынужденных |
à — амплитуда постоянна; á — амплитуда уменьшается |
колебаний звеньев |
Параметрические колебания вызываются изменением параметров механизма – масс звеньев, их моментов инерции и др. Например, к параметрическим можно отнести колебания скоростей звеньев из-за изменения приведенных величин. Наконец, автоколебания могут при определенных условиях возникать в машинном агрегате или механизме под действием сил, которые
191
сами не обладают колебательными свойствами. Режим автоколебаний поддерживается силой, вызываемой движением звеньев и исчезающей при остановке движения. Автоколебаниям подвержены массы грузов, перемещаемые транспортными средствами, детали механизмов и машин и т.п.
Механические колебания с высокой частотой в технике часто называют вибрациями. Вибрации деталей и элементов звеньев оказывают вредное воздействие на работоспособность механизмов, так как вызывают нагружение звеньев дополнительными инерционными усилиями. При больших значениях жесткости звеньев и амплитуд их колебаний эти усилия часто бывают причиной поломок деталей. Есть, однако, машины и механизмы, где вибрации используются как технологический фактор нормального функционирования устройств (вибробункеры, виброконвейеры и т.п.).
9.1. Характеристики свободных колебаний звеньев
Основными характеристиками колебательных систем при известной жесткости являются амплитуда колебаний (обычно представляемая в виде функционального выражения) и период колебаний (или их частота). В простейших случаях свободным колебаниям подвержены звенья, совершающие поступательные или вращательные движения: толкатели кулачковых механизмов, разного рода диски и колеса на упругих валах, поршни двигателей и компрессоров и т.д. Элементы кинематических пар, образованные этими звеньями, обладают упругостью. Определим выражения для вычисления амплитуд и частот колебаний звеньев, образующих вращательные или поступательные кинематические пары пятого класса.
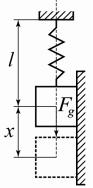
Пусть звено колеблется после деформирования упругой связи силой тяжести Fg (рис. 9.3). При произвольном положении вертикально перемещающегося звена на него действуют сила тяжести Fg и сила Fп, растягивающая пружину:
Fп Fg Cx , |
(9.1) |
где C – жесткость упругой связи; x – перемещение звена от положения равновесия с учетом направления координатной оси. В рассматриваемом положении звено находится в равновесии под действием сил
Fg, Fп и силы инерции: Fи Fg / g ddt22x . Тогда закон
Рис. 9.3. Колебания звена после деформирования
движения звена описывается дифференциальным уравнением, справедливым для любого значения координаты x:
192
Fg |
g d 2 |
2x |
Fg Fg Cx Cx , |
(9.2) |
|
dt |
|
|
|
где |
g – |
ускорение |
свободного |
падения. |
|||||||
d 2 x |
Cg |
|
Cg |
|
2 |
|
|
||||
|
2 |
|
|
|
x |
или |
|
|
c |
, |
|
dt |
|
F |
F |
|
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
g |
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2 x |
2 |
|
|
|
|
|
|
|
|
|
|
|
x 0 . |
dt2 c
Далее получим выражение
(9.3)
Дифференциальному |
уравнению |
удовлетворяют частные решения |
||||
x C cos t |
и y C |
2 |
sin t |
, где С1 и С2 |
– произвольные постоянные. Общее |
|
1 |
c |
|
c |
|
|
|
решениедифференциальногоуравненияполучимкаксумму частныхрешений:
x C1 cos ct C2 sin ct . |
(9.4) |
Так как функции C1 cos ct и C2 sin ct являются периодическими, то
они повторяют свои значения после некоторого интервала – периода коле-
баний Т. Тогда
|
c t T c t 2 , T 2 / c , |
|
или |
T 2 Fg / Cg 2 / g , |
(9.5) |
где – статическая деформация упругой связи под действием силы Fg,Fg / C . Величина, обратная периоду колебаний Т, называется частотой
колебаний:
f 1 T 1
T 1 2 / g. (9.6)
2 / g. (9.6)
Для определения закона колебательного движения звена необходимо вычислить постоянные C1 и C2 в выражении. При t = 0 положение звена будет характеризоваться перемещением x0, а начальная скорость движения звена будет равна dx0 / dt . Тогда из выражения (9.4) следует, что C1 = x0.
Дифференцируя выражение и подставляя в производную функцию значение
t = 0, получим |
C2 |
dx0 |
|
c . Следовательно, закон колебательного дви- |
|
|
dt |
|
|||
|
|
|
|
|
|
жения звена при его поступательном движении будет описываться выражением
193
|
|
x x0 cos ct |
dx0 |
|
|
(9.7) |
||||
|
|
|
|
c sin ct. |
||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
, |
||||||
Геометрической интерпретацией выражения (9.7) является вектор X |
||||||||||
вращающийся с угловой скоростью c . Модуль этого вектора |
|
|
|
|||||||
|
|
X |
x2 |
dx0 |
|
|
2 . |
(9.8) |
||
|
|
|
0 |
|
|
c |
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
Тогда перемещение или амплитуда колебаний x угла поворота ct |
век- |
|||||||||
|
|
будут равны |
|
|
|
|
|
|
|
|
тора X |
|
|
|
|
|
|
|
|
||
|
|
x X cos ct , |
|
(9.9) |
||||||
где – сдвиг фаз колебаний звена, пропорциональных cos ct и зависящих от начального перемещения x0 и пропорциональных sin ct и зависящих от
параметра |
dx0 |
|
|
|
; |
|
|
|
dt |
|
c |
|
|
|
|
|
|
|
|
|
arctg |
dx0 |
|
|
|
x . |
|
|
|
dt |
|
c |
0 |
|
|
|
|
|
|
|
|
Во вращательных кинематических парах имеют место крутильные колебания звеньев. При рассмотрении крутильных колебаний звена, обладающего моментом инерции I, после аналогичных рассуждений получим выражения для амплитуды и периода колебаний:
dx0 |
|
|
|
0 cos ct |
dt |
|
c sin ct ; |
|
|
|
|
T 2 |
I / C ; |
||
f 1/ 2 |
C / I . |
||
9.2. Характеристики вынужденных колебаний звеньев
(9.10)
(9.11)
(9.12)
При действии на звенья периодически изменяющихся внешних сил законы их изменения в реальных механизмах обычно неизвестны или могут быть описаны лишь приближенно. Для определения характеристик вынужденных колебаний звеньев в первом приближении предполагают, что возмущающая сила меняется по периодическому закону F t F sin ct . Пе-
риод ее изменения тогда равен Tв 2в , а частота fв в / 2 . Дифферен-
циальное уравнение, описывающее закон вынужденных колебаний звена в этом случае, будет иметь вид
194

Fg / g ddt2 |
2x Fg Fg Cx F sin вt . |
(9.13) |
Обозначив Fgg q , после преобразований приведем выражение к виду
|
|
d 2 x |
2 |
t . |
(9.14) |
|
|
dt2 |
x qsin |
||
|
|
c |
в |
|
|
Предположим, что амплитуда колебаний x пропорциональна |
sin вt . |
||||
Тогда получим |
x k sin t . |
d 2 x |
2 |
|
|
dt2 |
k sin t . Подставляя эти значения ве- |
||||
|
в |
в |
в |
|
|
личин в (9.14), после преобразований имеем |
|
|
|||
|
|
k q c2 в2 . |
(9.15) |
||
Частное решение дифференциального уравнения (9.14) получим в виде |
|||||
|
x k sin вt qsin вt / c2 в2 , |
(9.16) |
|||
а общее решение уравнения при учете собственных и вынужденных колебаний выразим как сумму двух решений:
x C1 cos ct C2 sin ct qsin вt / с2 в2 . |
(9.17) |
В этом выражении первые два слагаемых характеризуют рассмотренные выше собственные колебания звеньев, а третье – вынужденные, зависящие от возбуждающей внешней силы. Если собственные колебания малы по сравнению с вынужденными или отсутствуют, что имеет место при сопротивлении движению звеньев, то колебательный процесс будет описы-
ваться уравнением. Используя выражения для q и с2 , после преобразования получим
x F / C sin вt 1/ 1 в2 / с2 , |
(9.18) |
где (F/C) – деформация звена при статическом действии F.
Выражение 1 / 1 в2 / с2 kд называют динамическим коэффициен-
том. Динамический коэффициент зависит только от соотношения частот действия возмущающей силы и собственных колебаний. Из графика его изменения (рис. 9.4) и выражения видно, что при малых значениях отношения
195
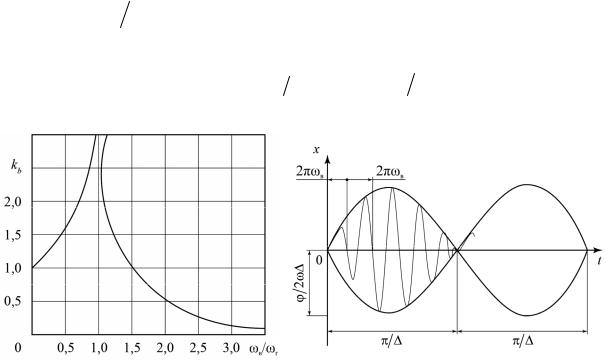
частот вынужденных и собственных колебаний амплитуда колебаний близка к величине статической деформации. При отношениях в и с , близких к единице, величина динамического коэффициента и амплитуда колебаний быстро возрастают, и при в с (условие резонанса) величины их значе-
ний теоретически обращаются в бесконечность. В реальных механизмах динамический коэффициент kд и амплитуда колебаний x обычно не достигают больших значений, так как на звенья в кинематических парах всегда налагаются и неупругие связи. Однако длительная работа механизмов в зоне резонанса невозможна, так как это может привести либо к поломкам деталей, либо к выходу из строя установленных на звеньях приборов и устройств.
Если значения частот и амплитуд собственных и вынужденных колебаний соизмеримы, то функция, описывающая закон колебательного движения, может быть получена из выражения (9.17) после определения значе-
ний постоянных C1 и C2. При |
t = 0 имеем: |
x = 0, |
dx |
0 , C1 = 0, |
|
|
|
|
|
dt |
|
C2 q в / с |
c2 / в2 . Тогда после преобразований выражения получим |
||||
(рис. 9.5): |
|
|
|
|
|
|
x q sin вt в |
с sin ct / c2 |
в2 , |
|
(9.19) |
Рис. 9.4. График динамического коэффици- |
Рис. 9.5. Изменение амплитуды |
ента в зависимости от амплитуды колебаний |
в зависимости от периода колебаний |
При работе механизма в зоне резонансных колебаний его звеньев, когда разность частот с в 2 весьма мала, пренебрегая значениями величин
второго порядка малости, получим после преобразования выражения (9.19)
196

x sin вt c 2  c sin ct q / c2 в2 .
c sin ct q / c2 в2 .
Используя известные тригонометрические соотношения, найдем
|
|
2q |
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
cos 0,5t sin |
0,5t |
|
|
|||||
2 |
|
2 |
|
|||||||||
|
|
|
в |
c |
|
|
в |
c |
|
|
||
c |
в |
|
|
|
|
|
|
|
|
|||
2q / sin t cos 0,5t |
2 |
2 |
. |
|
|
|||||||
|
|
|
|
|
|
в |
c |
c |
в |
|
|
|
После преобразований, |
пренебрегая |
|
величиной |
|
2 |
и считая |
||||||
cos вt t cos вt , |
получим выражение, |
характеризующее |
изменение |
|||||||||
амплитуды колебаний при работе механизма в резонансной зоне частот: |
||||||||||||
|
|
|
|
x qsin t cos вt / 2 в . |
|
|
|
(9.20) |
||||
Так как величина |
|
мала, то значение выражения sin t |
≈ t |
меняется |
||||||||
медленно с периодом Т = 2π/ |
. При равенстве частот в c , т.е. при на- |
|||||||||||
ступлении резонанса, получим |
|
|
|
|
|
|
|
|
||||
|
|
|
|
x qt / 2 в cos вt . |
|
|
|
(9.21) |
||||
Анализ этого выражения показывает, что амплитуда растет со временем (см. рис. 9.5). Это означает, что хотя величина динамического коэффициента kд стремится к бесконечности, для достижения опасных для деталей значений амплитуд колебаний необходимо время. Следовательно, в реальном механизме разрушения деталей не наступит, если резонансная зона будет пройдена быстро.
9.3. Особенности колебаний вращающихся звеньев
Вращающиеся звенья в механизмах устанавливают так, чтобы центры их масс находились на осях вращения. Из-за неточностей изготовления и монтажа звеньев это не всегда удается, поэтому при их вращении возникает неуравновешенная центробежная сила, которая вызывает колебания валов и осей вращения. Вращение звеньев становится неустойчивым.
Рассмотрим вращающееся с угловой скоростью ω звено со шкивом, имеющим массу m, центр тяжести которого смещен относительно оси вращения длиной l на величину e (рис. 9.6). Под действием центробежной силы при вращении возникает прогиб вала y. Тогда, пренебрегая силами тяжести, получим величину центробежной силы, вызывающей прогиб вала y:
F m 2 y e .
197
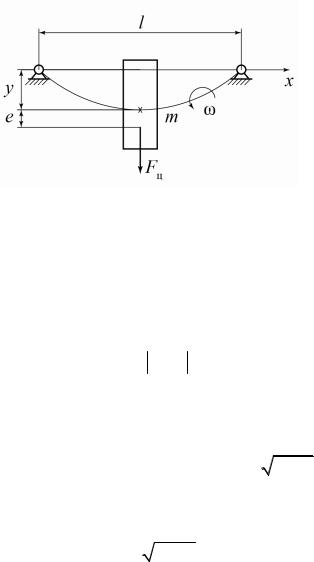
Рис. 9.6. Зависимость прогиба звена от скорости вращения
Как известно из курса сопротивления материалов, прогиб вала от действия центробежной силы при известных его модуле упругости материала E и моменте инерции I поперечного сечения равен y = Fц / C = Fцl3/48EI.
Центробежная сила уравновешивается силой упругости звена. Тогда из условия равновесия следует, что m 2 y e = Cy, откуда получим
Y = e/ (C/ m 2 1) . |
(9.22) |
Из анализа зависимости (9.22) следует, что прогиб вала возрастает при приближении значения ω к значению величины C / m . Следовательно, критическое значение угловой скорости, при которой прогиб теоретически становится равным бесконечности, равно
кр С / m . |
(9.23) |
Связав ось ординат y с вращающимся диском, получим из (9.22)
y |
|
|
|
|
e |
|
|
. |
(9.24) |
|
|
|
|
кр 2 |
1 |
|
|||||
|
|
|||||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Из зависимости (9.24) следует, что с увеличением скорости вращения прогиб звена уменьшается и центр масс звена стремится к установке на геометрической оси его вращения.
9.4. Особенности колебаний поступательно движущихся звеньев
Учет упругости поступательно движущихся звеньев позволяет подобрать их размеры и массы таким образом, чтобы устранить возможные погрешности в их законах движения. Рассмотрим влияние упругости звеньев
198
на функцию перемещения толкателя кулачкового механизма, для условий безударной работы которого очень важна точность реализации заданного движения толкателя.
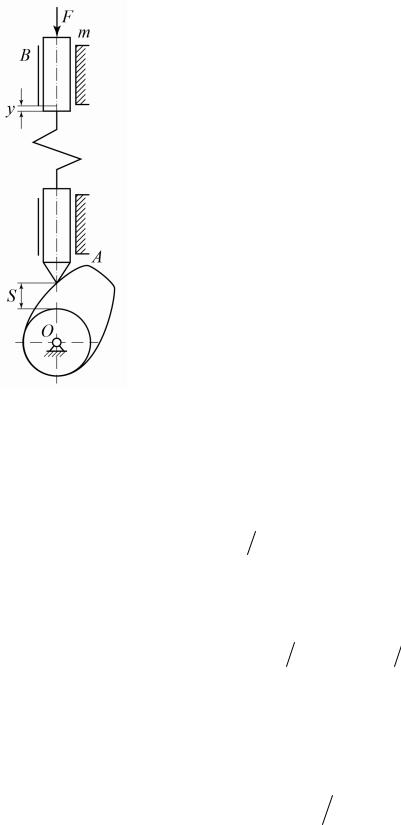
В реальных кулачковых механизмах жесткость кулачков намного больше жесткости толкателей. Для обеспечения замыкания кинематической пары кулачок–толкатель в конструкции узла толкателя предусматривают пружину (рис. 9.7). Под действием силы технологического сопротивления, действующей на толкатель, и давления кулачка толкатель деформируется. С учетом его деформации дифференциальное уравнение движения упругого толкателя будет иметь вид
|
|
|
|
d 2 y |
|
C |
Cs |
|
|
||
|
|
|
|
|
|
|
|
y |
|
, |
(9.25) |
|
|
|
|
dt |
2 |
m |
|||||
|
|
|
|
|
|
m |
|
|
|||
Рис. 9.7. Схема |
где C – коэффициент жесткости толкателя; m – масса |
||||||||||
кулачкового механизма толкателя; s – упругое перемещение толкателя. |
|||||||||||
|
|
Если толкателю задан косинусоидальный закон |
|||||||||
движения с функцией ускорения в виде a t a cos t / ty , то функцию пе- |
|||||||||||
ремещения толкателя после интегрирования получим в виде |
|
||||||||||
|
s t aty2 |
n2 1 cos t / ty , |
|
|
(9.26) |
||||||
где ty – время |
прохождения фазы удаления |
|
толкателя. |
Учитывая, что |
|||||||
C / m 2 , дифференциальное уравнение запишем в виде |
|
|
|||||||||
c |
|
|
|
|
|
|
|
|
|
|
|
|
d 2 y |
2 |
2 |
|
|
|
|
|
|
|
|
|
dt2 |
c y a cty 1 cos t ty . |
|
(9.27) |
|||||||
Решение линейного дифференциального уравнения второго порядка с правой частью получим, суммируя решение однородного уравнения (9.24) и частного решения (9.27):
|
|
|
y Asin ct B cos ct |
(9.28) |
||||
|
aty2 |
/ n 1 cos t / ty 1 t / ty . |
||||||
|
|
|||||||
Принимая 2 / T |
, |
|
n cty |
2t |
|
/ T , определяя коэффициенты А и В |
||
|
|
y |
||||||
c |
c |
|
|
|
c |
|
||
|
|
|
|
|
|
|
||
из условий при t = 0, y = 0, dy/dt = 0, после преобразований получим
199
|
|
|
|
|
|
|
2 |
|
t |
|
|
nt |
|
|
||
at2 |
|
|
|
n |
|
cos |
ty |
|
cos |
ty |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||
y |
|
y |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
. (9.29) |
|
2 |
|
|
|
|
|
2 |
|
|
|
||||||
|
|
|
|
|
|
|
n |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дважды продифференцировав выражения, получим закон ускорения толкателя
d 2 y dt2
an |
2 |
|
|
t |
|
nt |
|
|||
|
cos |
|
|
|
cos |
|
|
|||
|
|
|
|
ty |
|
|
|
|
||
|
|
|
|
|
|
tó |
. |
(9.30) |
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
n2 1 |
|
|
|
||
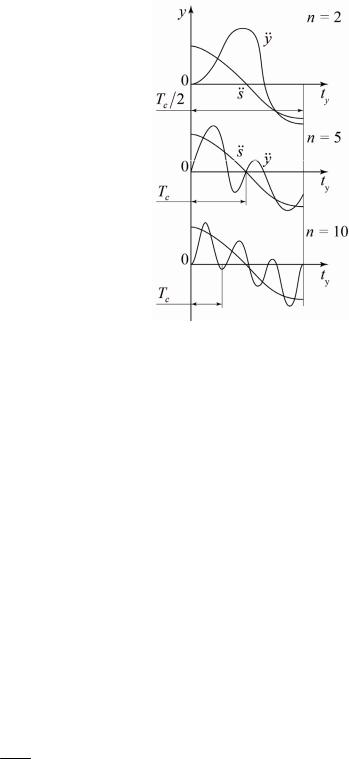
На рис. 9.8 приведены графики функции ускорений толкателя y для разных значений n в
сравнении с функцией ускорений S , заданных без учета упругости толкателя. Как видно из графиков, уменьшение периода собственных
колебаний Tc по сравнению со временем удаления толкателя ty ведет к существенным искажениям представления о законе движения толкателя.
9.5.Демпфирование свободных колебаний звеньев
Вреальных механизмах относительное движение звеньев всегда сопровождается действием сил сопротивления движению. К ним относят силы трения в кинематических парах, электромагнитного сопротивления в электрических машинах, гидродинамического сопротивления в гидромашинах и т.п. Поэтому колебательные движения звеньев всегда сопровождаются действием сил неупругого сопротивления. Эти силы демпфируют колебания, т.е. способствуют их гашению. При определении параметров колебательного процесса величину силы демпфирования в первом приближении принимают пропорциональной скорости движения. Закон движения будет описываться дифференциальным уравнением
G / g ddt22x Cx k dxdt ,
где k – коэффициент пропорциональности.
Обозначив kg / G = 2n, получим дифференциальное уравнение для свободных колебаний звена с демпфированием
d 2 x |
dx |
2 |
, |
(9.31) |
||
dt |
2 |
2n |
|
ct 0 |
||
|
dt |
|
|
|
||
200