

книги / Остаточные напряжения в полимерных композиционных материалах
..pdfтрудняется инерционностью процессов теплопередачи в полимерах и невозможностью полной компенсации несовместности деформирования, обусловленной различием свойств материалов изделия и технологического оборудования. Один из путей решения данной проблемы – приложение на стадии охлаждения полимерного изделия дополнительной, переменной во времени внешней нагрузки. В разделе предлагается и анализируется методика расчета оптимального силового регулирования остаточных напряжений аморфных стеклующихся сетчатых полимеров.
Для описания термомеханического поведения материала используются определяющие соотношения в упругом приближении (3.3), (3.4), записанные в сокращенной форме:
|
|
|
|
|
|
|
|
ˆ |
|
4 ˆ |
|
|
|
|
|
|
ˆ |
|
N (t ) |
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|||
|
|
|
|
ˆ |
|
|
|
|
|
ˆ |
|
ˆ |
|
|||||||||
|
|
|
|
|
|
|
C1 + C2 N (t)) |
|
C2 |
(7.11) |
||||||||||||
|
|
|
|
σ(t) = ( |
|
|
ε(t) − |
|
|
ε(τ)dN (τ), |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
где |
4 |
ˆ |
= |
4 ˆ |
− |
4 ˆ |
; |
4 |
ˆ |
4 ˆ |
– тензоры упругих констант материала |
|||||||||||
|
C2 |
Cg |
C1 |
|
Cg , |
C1 |
||||||||||||||||
в стеклообразном и высокоэластическом состояниях соответственно; εˆ (t) = εˆ − εˆT ; εˆ , εˆT – тензоры полных и температурных деформа-
T (t )
ций соответственно; εTij = αij (τ)dT (τ); αij = αδij ; α – коэффициент
T0
температурного расширения; δij – символ Кронекера; σˆ (t) – тензор напряжений; T (t) – температура; t, τ – время. Соотношения (7.1) подразумевают существование связи между степенью стеклования N и температурой T. Для этого, в частности, можно использовать одну из формул (2.7)–(2.9)
Пусть изделие, занимающее область Ω с границей S, охлаждается от температуры TH за счет теплообмена с окружающей средой. При остывании на части его границы Sσ действует внешняя дополнительная нагрузка P(x,t) , не зависящая от температуры и не влияющая на теплообмен. Приняв допущение об отсутствии источников тепловыделения, можно разделить проблему определения остаточно-
211
го напряженно-деформированного состояния конструкции на две несвязанных задачи. Первая из них – задача теплопроводности
T (x,t) = a2 T (x,t), x Ω, |
t (0,t* ]; |
(7.12) |
sup(T (x,t* )) < Tg2 |
; |
(7.13) |
xΩ |
|
|
T (x,0) = TH ; T (x,t) = TK , t > t*; |
(7.14) |
|
λn grad(T ) = h(T (x,t) − Ts (t)), x S3 ; |
(7.15) |
|
аn grad(T ) = 0 , x S0 , |
(7.16) |
|
где t* – время перехода всего изделия в стеклообразное состояние; a2 – коэффициент температуропроводности, a2 = λ / (cρ); h – коэффициент теплоотдачи; x, n – радиус-вектор и вектор единичной нормали кповерхностисоответственно, Ts – температураокружающейсреды.
Результаты решения (7.12)–(7.16) используются в задаче расчета напряженно-деформированного состояния, при этом система уравне-
ний, помимо соотношений (7.11), включает |
|
|
|||||||||
ˆ |
|
|
|
x |
|
Ω ; |
(7.17) |
||||
div σ(x,t) = 0 , |
|
|
|||||||||
ˆ |
|
|
T |
+ |
|
|
|
|
|
|
|
ε(x,t) = (( |
|
|
u(x,t)) |
|
|
u(x,t)) / 2 ; |
(7.18) |
||||
|
|
|
ˆ |
= 0; |
|
|
|
|
(7.19) |
||
|
|
|
σ(x,0) |
|
|
|
|
||||
u(x,t) = U(x,t), |
x Su ; |
(7.20) |
|||||||||
ˆ |
|
|
n = P(x,t), |
x |
|
Sσ, |
(7.21) |
||||
σ(x,t) |
|
|
|
||||||||
где u – вектор перемещений; U(x,t) – перемещения, заданные на части поверхности Su ; P(x,t) – управляющая нагрузка.
Будем полагать, что внешнюю нагрузку можно представить в виде произведения функций времени и координат
212

P(x,t) = px (x) p(t)h(t* − t), |
(7.22) |
где px (x) – заданная функция; h – функция Хевисайда. Тогда задача
управления формулируется следующим образом: найти управление p(t), сообщающее минимум функционалу
ˆ* |
ˆ R |
2 |
(7.23) |
Φ( p(t)) = [F(σ |
– σ |
)] dΩ → min |
Ω
при ограничениях (7.11)–(7.21), где σ*(x) ≡ σˆ (x,t) , t > t* – поле технологических остаточных напряжений (решение (7.11)–(7.21)); σˆ R (x,t) – задаваемое по условиям эксплуатации распределение остаточных напряжений (в частности, отсутствие остаточных напряжений соответствует случаю σˆ R (x,t) = 0); F(σˆ ) – некоторая скалярная функ-
ция тензора напряжений. В качестве такой функции может выступать один из инвариантов, например, интенсивность напряжений:
ˆ |
1 |
|
2 |
|
2 |
|
2 |
2 |
2 |
2 |
F(σ) = |
|
(σ11 − σ22 ) |
|
+ (σ11 − σ33 ) |
|
+ (σ33 − σ22 ) |
|
+ 6(σ12 |
+ σ13 |
+ σ23 ) . |
2 |
|
|
|
Покажем, что решение задачи определения напряженно-дефор- мированного состояния (7.11), (7.17)–(7.21) можно представить в виде следующей суперпозиции:
ˆ |
ˆ P |
ˆT |
(x,t), |
(7.24) |
σ(x,t) = σ |
(x,t) + σ |
|||
где σˆT (x,t) – решение задачи при отсутствии внешнего воздействия:
(1.17)–(1.21), p(t) = 0 ; |
(7.25) |
σˆ P (x,t) – решение задачи в условиях, когда не учитывается температурная деформация:
(1.17)–(1.21), |
ˆ |
= 0. |
(7.26) |
εT |
Для этого преобразуем соотношения (7.11) к более компактному виду:
213

|
4 ˆ |
|
|
4 ˆ |
|
|
|
|
4 ˆ |
|
|
t |
|
|
|
|
||||||
ˆ |
|
|
|
|
|
ˆ |
|
|
|
ˆ |
|
|
|
|
||||||||
|
|
+ C2 N (t)) |
(t) − C2 |
|
|
|
|
|
|
|||||||||||||
σ(t) = ( C1 |
|
ε |
|
|
ε(τ)dN (τ) = |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
4 ˆ |
|
|
|
|
|
|
4 ˆ |
t |
|
|
|
|
|
|
|
|
|
|||
|
= |
|
ˆ |
|
+ |
|
|
ˆ |
|
|
|
|
||||||||||
|
|
C1 |
|
C2 |
|
|
|
|
|
|||||||||||||
|
|
|
ε(t) |
N (τ)dε(τ) = |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
4 ˆ |
|
|
|
|
|
|
t |
|
|
ˆ |
|
4 ˆ |
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
4 |
|
|
|
|
|
ˆ |
|
||||||||
= |
C1 |
(0) + ( C1 + C2 N (τ)) |
|
|
||||||||||||||||||
|
|
ε |
|
|
dε(τ) = |
|
||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
t |
|
ˆ |
|
4 ˆ |
|
|
|
|
|
|
|
|
|
|
|
= |
ˆ |
|
|
|
|
|
|
4 |
+ |
|
|
|
ˆ |
|
|
|
(7.27) |
||||
|
|
|
|
|
|
|
|
|
|
C2 N (τ)) |
|
|
(τ). |
|||||||||
|
σ(0) + ( C1 |
|
|
dε |
|
|||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Здесь и далее радиус-вектор x опущен для сокращения записи. С учетом (7.22) и в предположении непрерывности p(t) разложим
полный дифференциал dεˆ (τ) по двум независимым переменным – нагрузке p(τ) и температуре T (τ) :
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
||
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
∂ε(τ) |
|
|
|
∂ε(τ) |
|
|||||||||||||||
|
dε(τ) = |
|
|
|
|
|
|
dp(τ) + |
|
|
|
|
|
|
|
|
||||||||
|
|
|
∂p |
|
T |
|
∂T |
|
p |
|||||||||||||||
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
(τ)) |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
ˆ |
|
ˆ |
|
|
|
|
|
|
|
|
ˆ |
|
|||||||
= |
|
∂(ε(τ) |
εT |
|
dp(τ) + |
|
∂ε(τ) |
|||||||||||||||||
|
|
|
|
|
∂p |
|
|
|
|
|
|
|
|
∂T |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dT (τ) =
dT (τ) =
p
|
ˆ |
|
|
|
|
|
ˆ |
|
|
|
∂ε(τ) |
|
|
dp(τ) + |
∂ε(τ) |
|
|
||||
|
∂p |
T |
∂T |
p |
||||||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||
= εˆ p (τ)dp(τ) + dεˆT
dT (τ) =
(τ) , |
(7.28) |
где εˆ p (τ) – приращение тензора деформаций под действием единичного приращения внешней нагрузки в момент τ при отсутствии температурной деформации (α = 0); dεˆT (τ) – полный дифференциал
тензора деформаций без учета дополнительного нагружения (p(t) = 0). После подстановки (7.28) в (7.27) получим
214
|
|
t |
ˆ |
4 ˆ |
|
|
|
|
|
|
ˆ |
ˆ |
4 |
|
ˆ |
P |
|
||||
+ ( C1 + C2 N ( |
τ)) |
|
|
|||||||
σ(t) = σ(0) |
|
ε (τ)dP(τ) + |
|
|||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
t |
4 ˆ |
|
4 ˆ |
|
|
|
|
|
(7.29) |
|
|
|
|
ˆ |
T |
|
|
|||
|
+ ( C1 + C2 N (τ)) |
|
(τ). |
|
||||||
|
dε |
|
|
|||||||
|
0 |
|
|
|
|
|
|
|
|
|
Первые два слагаемых в (7.29) представляют собой решение задачи (7.25) σˆ P (t) , третье – решение задачи (7.26) σˆT (t) .
Используя (7.29), преобразуем (7.23) к виду
ˆ P* |
ˆT* |
ˆ R |
2 |
dΩ → min , |
(7.30) |
Φ( p(t)) = F (σ |
+ σ |
− σ |
) |
Ω
при этом управляющая нагрузка присутствует только в первом слагаемом. Из (7.22), (7.29) следует
ˆ |
|
|
ˆ |
|
|
|
|
|
|
ˆ |
|
|
|
|
|
t* |
|
ˆ |
|
|
|
ˆ |
|
|
|
|
ˆ |
|
|
|
||||
σ |
P* |
|
= σ |
P |
|
|
|
|
|
= σ(0) |
+ ( |
4 |
|
+ |
4 |
|
|
|
|
|
ε |
P |
(τ)dp(τ) – |
|
||||||||||
|
(t) |
|
(t) |
t>t* |
|
|
C1 |
|
C2 N (τ)) |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 ˆ |
|
|
|
ˆ |
|
|
|
|
|
|
|
|
) = |
4 ˆ |
|
|
(0) p(0) + |
|
||||||||||||
|
|
|
– ( |
|
4 |
|
|
P |
(t |
* |
) p(t |
* |
|
ε |
P |
|
||||||||||||||||||
|
|
|
|
C1 |
+ C2 ) ε |
|
|
|
|
C1 |
|
|
||||||||||||||||||||||
|
t* |
4 ˆ |
|
|
|
4 ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
4 ˆ |
|
|
4 ˆ |
|
|
|
|
|
|
|
|
||||
|
+ {( C1 + |
|
C2 N (τ)) |
ˆ |
|
(τ) − ( |
C1 + |
|
C2 ) |
ˆ |
|
(t*)}dp(τ). |
(7.31) |
|||||||||||||||||||||
|
|
|
ε |
|
|
|
ε |
|
|
|||||||||||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для численного решения (7.30) осуществим дискретизацию во времени и пространстве. Обозначим через Me , Mt количество эле-
ментов и шагов по времени соответственно. Под элементом Ωk подразумевается часть области Ω , с осредненными по ней деформация-
Me
ми и напряжениями, причем Ω = Ωk . Применяя левую формулу
k =1
прямоугольников для вычисления интеграла в правой части (7.31), с учетом (7.22) получим
ˆ P* |
Mt |
ˆ |
|
|
|
|
|
pj , k = 1, Me , |
(7.32) |
||||
σk |
= ψkj |
|||||
j=0
215
где
|
|
|
|
ˆ |
4 ˆ |
ˆ |
P |
; |
|
|
|
|
|
|
|
|
|
C1 |
|
|
|
|
|
||||
|
|
|
|
ψk0 = |
εk 0 |
|
|
|
(7.33) |
||||
ˆ |
4 ˆ 4 |
ˆ |
ˆ |
|
|
4 ˆ |
4 ˆ |
|
ˆ |
||||
P |
|
|
P |
||||||||||
= ( C1 + |
C2 Nkj ) |
|
|
|
|
C2 ) |
|
||||||
ψkj |
εkj − ( C1 + |
εkMt ; |
|||||||||||
pj = pj − pj−1 , |
j = |
|
t ; |
p0 = p(0) ; |
p−1 = 0 ; |
Ψ – матрица влияния. |
|||||||
0, M |
|||||||||||||
|
|
|
|
|
|
|
|
|
ˆ |
– аддитивный вклад еди- |
|||
Физический смысл тензорного параметра ψkj |
|||||||||||||
ничного приращения внешней нагрузки |
|
pj |
на j-м шаге по времени в |
||||||||||
тензор остаточных напряжений σkP* в k-м элементе с учетом снятия на-
грузки на последнем шаге (второе слагаемое в правой части (7.33)). Таким образом, благодаря линейности определяющих соотношений удается в матрице влияния Ψ разместить полную информацию об «управляемости» остаточного напряженно-деформированного состояния дополнительной нагрузкой.
Задача (7.30) с учетом (7.32) сводится к решению системы урав-
нений вида |
|
|
|
|
|
|
∂Φ / ∂( |
pl ) = 0; |
|
|
(7.34) |
||
Me |
|
+ σk |
− σk |
) |
. |
|
Φ = F (σk |
|
|||||
|
ˆ P* |
ˆT* |
ˆ R |
2 |
|
|
k=1
Возможны варианты, когда функция управления P(t) аппроксимируется одним из известных методов (степенной ряд, кусочнолинейный полином, сплайны). Это позволяет понизить порядок системы (7.34) и добиться большей устойчивости решения.
Технология численного расчета оптимального силового воздействия, в соответствии с приведенными выше выкладками, состоит из следующих этапов:
1. Решение задачи (7.25) – определение поля остаточных напряжений σˆTk * в конструкции, находящейся в «естественных» условиях
технологического процесса охлаждения без дополнительных внешних воздействий. Остаточные напряжения при этом формируются только за счет неравномерности пространственно-временного рас-
216
пределения температурных деформаций в объеме охлаждаемой конструкции.
2. Расчет матрицы Ψ. Для этого решается задача охлаждения вида (7.26), из которой исключены температурные напряжения и деформации. Учитывается лишь влияние температуры, найденное из решения системы (7.12)–(7.16), на изменение степени стеклования N . На каждом шаге по времени прикладывается дополнитель-
ная единичная нагрузка |
p(t j ) = 1 |
|
и определяется изменение поля |
|||||||||
|
|
|
|
1 |
4 ˆ |
4 ˆ |
|
|
|
1 |
|
|
|
|
|
ˆ |
|
ˆ |
|
|
|||||
напряжений |
|
( C1 + |
C2 Nkj ) |
|
(см. (7.33)). В |
соответствии |
||||||
σkj = |
|
εkj |
||||||||||
с (7.33) |
элемент |
матрицы |
влияния вычисляется |
по формуле |
||||||||
ˆ |
= ˆ1 |
+ ˆ1 |
, где |
ˆ1 |
|
|
|
|
|
|
|
|
ψkj |
σkj |
σkMt |
σkMt – изменение поля напряжений от единично- |
|||||||||
го приращения нагрузки в полностью охлажденном изделии. 3. Формирование и решение системы (7.34).
Изложенные выше рассуждения допускают простое обобщение для варианта конечного числа независимых внешних воздействий. Можно показать, что в качестве управляющих объектов, помимо внешней нагрузки P(x,t) (силовое воздействие, см. (7.21)), могут
выступать в том числе и граничные перемещения U(x,t) (кинематическое воздействие, см. (7.20)), а также их комбинации.
Следует также отметить, что количество решений задачи термоупругости, необходимых для формирования матрицы Ψ и расчета σˆTk * , составляет 2Nt , т.е. всего в 2 раза превышает трудоемкость ре-
шения прямой задачи определения остаточного напряженно-дефор- мированного состояния в свободной от внешнего воздействия охлаждаемой конструкции.
7.4.2. Иллюстративный пример: минимизация остаточных напряжений в пакете стержней
Как пример практического использования полученных зависимостей при совместном, кинематическом и силовом управляющем воздействии далее приводится решение следующей модельной задачи.
217
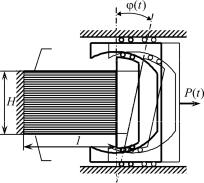
Пакет совместно деформирующихся полимерных стержней охлаждается от температуры TH благодаря теплообмену с окружающей средой по границе S3 ( x = H , граничные условия III рода (7.15)) до температуры TK . Граница S0 (x = 0) адиабатическая (граничные условия вида (7.16)). Сосредоточенная сила P(t) и угловое перемещение φ(t) позволяют управлять деформацией пакета в процессе охла-
ждения. Предполагаем, что трение между слоями пакета, а также напряжения в направлениях, нормальных к продольному, отсутствуют. Данная гипотеза соответствует одноосному напряженному состоянию, для каждого стержня в пакете физические уравнения (7.11) пре-
образуются к форме σ(x,t) = σ(x,0) + t |
(E1 + E2 N (x, τ))dε(x, τ) , где |
0 |
|
E1, E2 – модули Юнга материала в высокоэластическом и стеклооб-
разном состояниях соответственно. Будем также полагать, что в начальный момент времени конструкция находится в естественном ненапряженном состоянии, т.е. σ(x,0) = 0, x [0,H].
Математически граничные условия задачи об определении напря- женно-деформированного состояния, соответствующие показанной на рис. 7.17 схеме, представляются в виде
∂ε(x,t) = φ(t) ; |
H |
σ(x,t)dx = P(t). |
|
∂x |
0 |
|
Рис. 7.17. Расчетная схема модельной задачи
218

Для получения численного решения проведем пространственновременную дискретизацию. Обозначим через Me количество стерж-
ней. Время охлаждения разобьем на Nt интервалов, в каждом из которых нагрузка P(t) и угловое перемещение φ(t) аппроксимируются кусочно-линейными полиномами, причем P(0) = φ(0) = 0 . Представление управляющих функций в виде ломаных с относительно малым числом узловых точек позволяет избежать появления осцилляций, возникающих в случае, когда неизвестные значения определяются на каждом шаге по времени. В свою очередь, 1-й интервал
разбивается на Mtl подинтервалов |
tlj . Тогда в момент времени |
||||
t [tJL−1,tJL ] соответствующие функции имеют вид |
|
||||
|
L−1 |
Mtl |
J −1 |
|
|
|
φ(t) = (clφ tlj ) + cLφ |
tlj |
+ (t − tJL−1 ) ; |
||
|
l=1 |
j=1 |
j=1 |
|
|
|
L−1 |
Mtl |
J −1 |
|
|
|
P(t) = (clP tlj ) + cLφ |
tlj |
+ (t − tJL−1 ) |
, |
|
|
l=1 |
j=1 |
j=1 |
|
|
L |
J |
|
|
|
|
где tJL = tlj . |
|
|
|
|
|
l=1 |
j=1 |
|
|
|
|
Будем решать задачу минимизации остаточных напряжений. Это означает, что в соответствии с принятыми обозначениями σkR = 0,
k = 1, Me . Тогда (7.34) преобразуется к системе 2Nt уравнений вида
∂Φ / ∂( Pl ) = 0,∂Φ / ∂( φl ) = 0,
Me
где Φ = F (σkP* + σφk* + σTk * )2 ; k =1
Pl |
= P(tl l ) − P(tl−1l ), |
φl |
= φ(tl l ) − |
|
|
Mt |
Mt |
|
Mt |
(7.35)
φ(tl−1l ).
Mt
Соответствующие выкладки приводят к решению системы уравнений [A]{c} = {d} относительно вектора {c}, где
219

|
Me |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μj ), i = 1, Nt ; j = 1, Nt , |
|||||||||||||||||||
|
(μi |
|||||||||||||||||||
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Me |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(νi |
μj ), i = 1, Nt ; j = Nt + 1, 2Nt , |
|||||||||||||||||
aij |
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
e (μi |
νj ), i = |
|
|
|
; j = |
|
|
|
, |
|
|||||||||
|
Nt + 1, 2 Nt |
1, Nt |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Me |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
(νi νj ), i = Nt + 1, 2 Nt ; j = Nt + 1, 2Nt , |
||||||||||||||||||
|
|
k=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Me |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
− (σTk * |
μi ), i = |
1, Nt |
, |
|
|||||||||||||
|
|
di = |
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
M |
T* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− (σk |
νi ), i = |
Nt + 1, 2Nt |
, |
|||||||||||||
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Mtl |
Mtl |
|
|
, |
i = 1, Nt , |
|
|||||
|
ci |
|
|||||||||
|
|
P |
|
|
|
|
|
|
|
||
μl = ψkjP |
tlj , νl = ψφkj tlj ; |
ci |
= |
|
|
|
|
|
|
|
|
|
|
i = N |
|
+ 1, 2N |
. |
||||||
j=1 |
j=1 |
|
cφ, |
t |
|||||||
|
|
|
|
i |
|
|
|
|
t |
|
|
Далее представлены результаты расчета для материала с физи- ко-механическими свойствами, близкими к характеристикам эпоксидной смолы ЭДТ-10 (см. гл. 4). Вычисления проводились для трех вариантов дополнительного воздействия: силового (φ(t) = 0 ), кинематического (P(t) = 0) и совместного, при TH = 160 °C ; TK = 20 °C;
H = 0,05 м; Me = 40; Nt = 10 (вариант 1) и Nt = 20 (вариант 2). Об-
щее количество шагов по времени в обоих вариантах одинаково
Nt
и равно Mtl = 400.
l=1
Результаты расчета представлены в безразмерном виде: P – безразмерная внешняя нагрузка, P = P / (K H ) ; σ – безразмерное
напряжение, σ = σ / K , где K = α(TH − TK )(E1 + E2 ) .
На рис. 7.18, 7.19 отображены результаты, полученные в первом варианте расчета.
220