

725
.pdfМ312.01.13.01 ТЧ. Его выполняют по расчетам разделов
3…5.
Кинематический анализ представлен планами положений, скоростей и ускорений, кинематическими диаграммами и одним годографом скорости или ускорения центра масс шатуна. Студенты строят 11 планов положений тонкими сплошными линиями. Одно заданное руководителем проекта положение показывают утолщенными линиями толщиной
1,5S.
По 12-ти положениям шатуна строят шатунные кривые штриховыми или тонкими линиями. На шатунах показывают направления угловых скоростей и ускорений. Для ползунов показывают и нумеруют их положения. Под планами положений строят индикаторные диаграммы с длиной абсциссы, равной ходу поршня Н. Студент строит один план скоростей, один план ускорений и один годограф скорости или ускорения центра масс шатуна по данным распечаток. Студенты, не использующие компьютерную технику, строят 6 или 12 планов скоростей и планов ускорений (по указанию руководителя проекта).
Кинематические диаграммы перемещений строят по 12 положениям ползуна С. Диаграмму скоростей строят по диаграмме перемещений методом графического дифференцирования. По компьютерным данным студент должен построить все три диаграммы: перемещений, скоростей и ускорений точки С ползуна и показать их штриховыми линиями.
Силовой расчет содержит три пары изображений: групп Ассура 2–3, 4–5 и начального звена 1 и их планы сил. Следует также изобразить два годографа сил: один в полярных координатах (R01, R12 или R23) и один в декартовых координатах
(R03).
Над каждым изображением располагают заголовок и масштаб изображения. На свободном поле чертежа размещают исходные данные рычажного механизма.
109
7.РАСЧЕТ МАХОВИКА
7.1.Задачи динамического анализа
При кинематическом анализе рычажного механизма угло-
вая скорость кривошипа 1 условно принята постоянной. В
действительности кинематические параметры являются функцией действующих в механизме переменных сил и масс подвижных звеньев. В технологических машинах силы сопротивления действуют в режиме рабочего хода, то есть при движении выходного звена только в одном направлении; при холостом ходе сила сопротивления связана с силами трения.
Наличие нескольких цилиндров и изменение давлений в них в соответствии с индикаторной диаграммой приводит к изменению усилий на поршни механизмов двигателей внутреннего сгорания и компрессоров. Переменные силы спо-
собствуют колебаниям угловой скорости кривошипа, по-
этому заданную угловую скорость следует считать средней угловой скоростью, то есть 1 1ñð . При установившемся
режиме 1 принимает различные значения в пределах от
1min до 1max . Колебания скорости главного вала вызывают
дополнительные динамические нагрузки, вследствие чего снижается долговечность и надежность машин. Наличие таких нагрузок легко поясняется следующей логической цепоч-
кой. |
|
|
|
|
Если |
1 const , |
то |
1 d 1 / dt 0 |
и |
M дин M и I 1 0. |
|
|
|
|
Моменты сил инерции Mè |
могут иметь большие значения |
|||
и существенно нагружать рычажные звенья. Инерционные нагрузки невозможно устранить, но их можно ограничить безопасными для работоспособности механизма значениями. Для этого на кривошипе закрепляется добавочная масса, называемая маховиком. Подбирая его момент инерции, можно обеспечить вращение кривошипа с заданным коэффициентом неравномерности:
110
|
1max 1min . |
(7.1) |
|
1ñð |
|
Для каждого вида машин имеется своя допустимая величина , выработанная практикой, например, для двигателей внутреннего сгорания и компрессоров = 1/80…1/150.
Задачами динамического синтеза и анализа рычажного механизма являются:
определение момента инерции маховика, его конструктивных размеров и массы;
построение диаграммы угловой скорости 1 1 ( ). ;
построение диаграммы углового ускорения 1 1 ( ).
7.2. Краткие теоретические сведения
Для облегчения динамических расчетов многозвенный ме-
ханизм заменяют одномассовой динамической моделью,
состоящей из одного звена и стойки. Такая кинематическая цепь называется начальным механизмом I класса. Тогда уравнение движения механизма можно заменить тождественным ему уравнением движения одного звена, называемого звеном при-
ведения.
Рис. 7.1
Звено приведения — одно из звеньев исследуемого механизма, имеющее ту же скорость, что и в реальном механизме. В механизме ДВС, как и во многих других механизмах, звено приведения — вращающееся (кривошип, рис. 7.1). Оно будет обладать приведенным моментом инерции Iп и на него действует приведенный момент сил Ì ï .
111
Приведенные силы и моменты сил являются эквивалентом всех сил, действующих на звенья механизма, а приведенные массы и моменты инерции — эквивалентом инертности механизма.
Приведенный момент сил Mп (либо приведенная сила Fп) определяется из равенства мощности звена приведения сумме мощностей сил, действующих на звенья механизма.
Приведенный момент Мп равен уравновешивающему моменту Ì ó по модулю и противоположен по направлению.
Приведенный момент инерции Iп (приведенная масса mп) определяется из равенства кинетической энергии звена приведения сумме кинетических энергий звеньев механизма:
Задачи динамического анализа и синтеза решаются на основе уравнения движения механизма под действием заданных сил в энергетической форме — уравнения кинетической энергии:
(7.2)
где Aд — работа движущих сил, Дж; Aс — работа сил полезных сопротивлений (без учета сил трения); Т — текущее значение кинетической энергии, Дж; Т0 — кинетическая энергия в начальный момент времени (при 0 ); Ò — прираще-
ние кинетической энергии.
В период установившегося движения Ò = 0 и в соответствии с формулой (7.2)
Aд = Aс. |
(7.3) |
Величина Ò — переменная и зависит от положения звена приведения. Полное приращение можно представить в виде суммы:
(7.4)
где ÒI — приращение кинетической энергии начального звена вместе с маховиком и другими звеньями, например, зубчатой передачей; ÒII — приращение кинетической энергии всех подвижных звеньев, кроме кривошипа.
112
Кинетическая энергия звеньев механизма определяется через момент инерции, которой также можно представить как сумму составляющих:
III II III IM Iп ,
где II IM — момент инерции начального звена вместе с
маховиком, кг·м2, практически это момент инерции маховика, так как моменты инерции других элементов (коленчатого вала, зубчатого колеса) намного меньше; III Iп — приве-
денный момент инерции всех подвижных звеньев, кроме начального.
При М д М с энергии к механизму прикладывается боль-
ше, чем потребляется. Избыток энергии идет на увеличение ÒI , то есть прежде всего на увеличение кинетической энер-
гии маховика (его скорости). При M с M д кинетическая
энергия маховика уменьшается. Таким образом, маховик то накапливает кинетическую энергию, когда работа двигателя оказывается в избытке, то отдает часть ее. Чем больше IM ,
тем выше аккумулирующая способность маховика, тем меньше будут колебания 1 при колебаниях потока энергии и тем рав-
номернее будет вращаться кривошип. Требуемый момент инерции маховика при заданном коэффициенте неравномерности определяют разными методами. В курсовом проекте рекомендуется использовать метод Н.И. Мерцалова.
Итак, для того, чтобы получить вращение главного вала машины с циклической неравномерностью, не превышающей требуемой величины, на главном валу закрепляют добавочную массу, называемую маховиком. Подбирая его момент инерции, обеспечивают вращение главного вала машины с заданным коэффициентом неравномерности .
Определение момента инерции маховика по заданной ве-
личине в процессе проектирования машины составляет за-
дачу динамического синтеза.
113
7.3. Диаграммы сил и приведенных моментов
Графические методы позволяют в наглядной форме показать, как изменяются кинетическая энергия механизма и угловая скорость звена приведения при изменении положения звена приведения. Ниже рассматривается метод Н.И. Мерцалова, позволяющий рассчитать момент инерции маховика и определить зависимость угловой скорости и углового ускорения кривошипа от времени.
Конструктивно кривошип 1, выбираемый в качестве звена приведения, представляет собой коленчатый вал, получающий вращение от электродвигателя через муфту и зубчатую передачу либо от коленвала движение передается к исполнительному органу через муфту и зубчатую передачу. Коленчатый вал снабжен противовесами для его уравновешивания.
Из индикаторной диаграммы рычажного механизма ДВС (рис. 2.1, б) видно, что давления и соответственно силы непрерывно изменяются. Также переменны силы инерции и момент сил инерции. Переменные силы способствуют колебанию угловой скорости кривошипа относительно среднего значения. Поставленный на коленчатый вал маховик предназначен для вписывания колебаний угловой скорости в задан-
ные пределы. Приведенный момент движущих сил определяют из равенства мощностей по формуле:
M ï 1 Fè 2 S 2 cos F è 2 , S 2 G2 S 2 cos G2 , S 2
M è 2 2 cos M è 2 , 2 Fä Fè 3 C cos FC , C G3 C cos G3 , C
Fè 4 S 4 cos F è 4 , S 4 G4 S 4 cos G4 , S 4
M è 4 4 cos M è 4 , 4 Fñ Fè 5 Å cos FÅ , Å G5 Å cos G5 , Å .
(7.5)
Параметры скоростей, входящих в формулу (7.5), находят из кинематического анализа, силовые параметры — из силового расчета. При использовании компьютерных расчетов
114
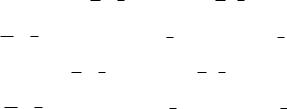
значения Mп определяют для одного положения механизма, заданного руководителем проекта. Компьютерные расчеты, которые следует использовать при построении диаграммы, дают 12 значений Mп, которую строят в масштабах м и (пример содержания и оформления листа 2 приведен на рис. 7.2). Масштаб угла поворота в мм:
|
|
|
|
|
|
|
|
/ 2 , |
(7.6) |
||
|
|
|
|
|
|
где — отрезок в мм, изображающий на оси абсцисс полный оборот кривошипа; на листах формата А2 обычно при-
|
|
|
|
|
|
|
|
нимают 180 мм. Масштаб приведенного момента, |
|||||||
мм/(Н∙м): |
|
||||||
|
|
|
|
|
|
|
|
|
|
ì Ì ï max / Mï max , |
(7.7) |
||||
|
|
|
|
||||
где Мп max — максимальная величина момента, Н∙м; Ì ï max |
— |
||||||
длина отрезка, изображающего максимальный момент, мм. |
|
||||||
Диаграмму приведенных моментов студент должен по- |
|||||||
строить по компьютерным распечаткам, помня, что знак Му, приведенного в табл. 10 распечатки, необходимо для получения Мп изменить на противоположный. Образец распечатки моментов и других параметров приведен на рис. 5.7. При отсутствии компьютерных расчетов студенту разрешается использовать упрощенный расчет: в формуле (7.5) учитывать только движущие силы и силы сопротивления.
115
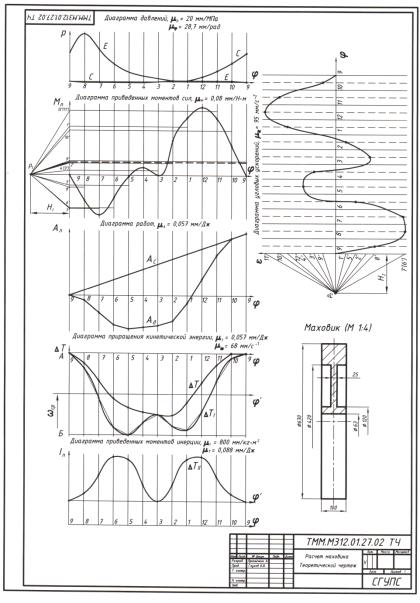
Рис. 7.2
116
7.4. Графическое интегрирование
Методом графического интегрирования диаграммы Мп = Мп( ) строят диаграмму работ движущих сил Ад = Ад( ) (для двигателей) либо работ сил сопротивления Ас = Ас( ) в соответствии с формулой:
|
|
A Mï d . |
(7.8) |
0 |
|
Метод графического интегрирования заключается в том, что диаграмму Мп = Мп ( ) заменяют ступенчатой таким образом, чтобы на каждом участке (0–1, 1–2 и т.д.) криволинейная трапеция (криволинейный треугольник) заменялась равновеликим прямоугольником, образованным осью абсцисс, двумя вертикальными линиями границ участков и горизонтальной линией (четвертой стороной), проведенной параллельно оси абсцисс так, чтобы площадь отброшенной фигуры О равнялась площади добавленной фигуры Д.
На рис. 7.3 проиллюстрирован метод графического интегрирования. Ординаты равновеликих прямоугольников Мп.0-1, Мп.1-2 и т.д. приблизительно соответствуют средним значениям моментов на участке, Δφ — угловой шаг.
Рис. 7.3
117

Выбирают полюс интегрирования Р на отрезке интегри-
рования Н. При выполнении курсового проекта рекомендуется принимать Н = 40…60 мм. Полюс интегрирования соеди-
няют прямой (лучом) с точкой пересечения четвертой стороны равновеликого прямоугольника с осью ординат. На пер-
вом участке диаграммы работ из начала координат проводят отрезок, параллельный первому лучу. Доказывается, что ордината 1–1″ на рис. 7.3, б является графическим изображением
работы сил сопротивления ÀÑ.0 1 на участке 0 –1. Масштаб диаграммы работ в мм/Дж:
μА = μм μφ /Н. |
(7.9) |
На втором участке из конца первого отрезка проводят отрезок, параллельный второму лучу. Ордината 2–2″ изображает работу сил сопротивления на участке 0–2 и т.д. На последнем из 12 участков ордината не будет равна нулю. Полученная ломаная линия приближенно представляет собой диаграмму Ас = Ас( ) (рис. 7.3, б). Расстояние в направлении оси ординат между соседними узловыми точками диаграммы изображает приращение работы на участке, а расстояние между начальной и текущей точками — работу за временной отрезок, равный нескольким участкам. Для механизма ДВС пример графического интегрирования диаграммы моментов приведен на рис. 7.2.
Величину работы за цикл (за один оборот кривошипа) определяют величиной ординаты в мм, соответствующей концу последнего участка, деленной на масштаб А.
7.5.Диаграммы работ и энергий
Всоответствии с уравнением (7.3) в установившемся режиме за цикл (за полный оборот кривошипа) работа дви-
жущих сил равна работе сил сопротивления, т.е. в начале
первого и в конце последнего участка Ад = Ac.
При условии постоянства момента сил сопротивления Мс
диаграмму работ сил сопротивления Ас (для двигателей)
строят соединением первой и последней точек кривой Ад =
Aд( ) прямой линией (рис. 7.2). График Мс = Мс(φ) строят методом графического дифференцирования (см. раздел 4). Для
118