

725
.pdfРис. 2.13
Таблица 2.33
Исходные данные рычажного механизма
Параметры |
|
|
|
Номер варианта |
|
|
|
|||||
01 |
02 |
03 |
04 |
05 |
06 |
07 |
08 |
09 |
10 |
|||
|
|
|||||||||||
1 , рад/с |
14 |
–11 |
14,5 |
–15 |
12 |
– |
11,5 |
–16 |
16,5 |
–17 |
||
15,5 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
lAB , м |
0,15 |
0,16 |
0,17 |
0,18 |
0,19 |
0,2 |
0,21 |
0,15 |
0,16 |
0,17 |
||
lBC , м |
0,31 |
0,32 |
0,33 |
0,34 |
0,35 |
0,36 |
0,37 |
0,38 |
0,39 |
0,4 |
||
lCE , м |
0,75 |
0,8 |
0,85 |
0,9 |
0,95 |
1 |
0,95 |
0,9 |
0,85 |
0,8 |
||
x |
, м |
0,7 |
0,72 |
0,75 |
0,78 |
0,8 |
0,82 |
0,85 |
0,88 |
0,9 |
0,92 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
x2 , м |
0,42 |
0,42 |
0,43 |
0,44 |
0,44 |
0,44 |
0,45 |
0,46 |
0,46 |
0,46 |
||
m m , кг |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
m3 , кг |
80 |
85 |
90 |
95 |
100 |
105 |
110 |
115 |
120 |
125 |
||
m |
, кг |
2 |
3 |
2 |
3 |
2 |
3 |
2 |
3 |
2 |
3 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
m |
, кг |
800 |
850 |
900 |
950 |
1000 |
1050 |
1100 |
1150 |
1200 |
1250 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
IS 2 , кг·м2 |
0,11 |
0,12 |
0,13 |
0,14 |
0,15 |
0,11 |
0,12 |
0,13 |
0,14 |
0,15 |
||
IS 3 , кг·м2 |
0,25 |
0,26 |
0,27 |
0,28 |
0,29 |
0,3 |
0,31 |
0,32 |
0,33 |
0,34 |
||
F |
, кН |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
|
c1 |
|
|
|
|
|
|
|
|
|
|
|
|
F |
, кН |
0,9 |
0,95 |
1 |
1,05 |
1,1 |
1,15 |
1,2 |
1,25 |
1,3 |
1,35 |
|
c 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,04 |
0,045 |
0,05 |
0,055 |
0,06 |
0,06 |
0,055 |
0,05 |
0,045 |
0,04 |
|
Примечание. Координаты: lBS 2 0, 4lBC , lCS 3 0, 25lCE , y lAB
49

Таблица 2.34
Исходные данные зубчатых механизмов
Параметры |
|
|
|
Номер варианта |
|
|
|
||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
|
|||||||||||
Ä , рад/с |
283 |
284 |
285 |
286 |
287 |
288 |
289 |
290 |
291 |
292 |
|
|
|
|
|
|
|
|
|
|
|
|
|
z1 |
12 |
10 |
11 |
14 |
13 |
12 |
10 |
11 |
13 |
14 |
|
z2 |
26 |
28 |
24 |
27 |
33 |
25 |
29 |
31 |
22 |
28 |
|
m , мм |
2,5 |
3 |
2,5 |
3 |
2,5 |
3 |
2,5 |
3 |
2,5 |
3 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
m , мм |
4 |
5 |
4 |
5 |
4 |
5 |
4 |
5 |
4 |
5 |
|
II |
|
|
|
|
|
|
|
|
|
|
|
|
Примечание. Первая ступень — простая с модулем m1 |
и числами зубьев |
|||||||||||||
шестерни и колеса z1 |
и z2. Вторая ступень — планетарная с передаточным |
||||||||||||||
отношением i5 |
|
|
, числом сателлитов nc и модулем m . |
|
|
|
|
|
|||||||
|
3h |
|
|
|
|
|
II |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.35 |
||
|
|
Исходные данные кулачковых механизмов |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметры |
|
|
|
|
|
|
Номер варианта |
|
|
|
|
|||
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
|
7 |
|
08 |
09 |
10 |
|
|
|
|
|
|
|
||||||||||
|
движения |
|
|
синус |
синус |
кос |
кос |
треуг |
треуг |
|
прям |
|
прям |
синус |
треуг |
|
закон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вид |
|
|
кор |
пост |
кор |
пост |
кор |
пост |
|
кор |
|
пост |
кор |
пост |
|
механизма |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φу, град |
|
|
96 |
72 |
108 |
96 |
60 |
144 |
|
168 |
|
120 |
132 |
156 |
|
φд, град |
|
|
84 |
108 |
72 |
96 |
120 |
36 |
|
12 |
|
60 |
48 |
24 |
|
φс, град |
|
|
96 |
72 |
108 |
96 |
60 |
144 |
|
168 |
|
120 |
132 |
156 |
|
φб, град |
|
|
84 |
108 |
72 |
96 |
120 |
36 |
|
12 |
|
60 |
48 |
24 |
|
Smax, мм |
|
|
– |
30 |
– |
28 |
– |
26 |
|
– |
|
25 |
– |
24 |
|
ψmax, град |
|
|
30 |
– |
28 |
– |
26 |
– |
|
25 |
|
– |
24 |
– |
|
l, мм |
|
|
125 |
– |
120 |
– |
115 |
– |
|
110 |
|
– |
105 |
– |
|
'äî ï , град |
|
|
45 |
30 |
45 |
30 |
45 |
30 |
|
45 |
|
30 |
45 |
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечание. Вид механизмов — с поступательно движущимся толкателем и коромысловый. Законы изменения ускорения — синусоидальный,
косинусоидальный, треугольный, |
прямоугольный. Допускаемый угол дав- |
|
ления в фазе сближения |
= 45 |
град. |
äî ï |
|
|
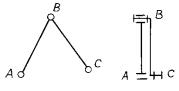
Пояснения к заданию 10
Рычажный механизм стана холодной калибровки труб (рис. 2.13, а) приводится в движение от электродвигателя через зуб-
50
чатую передачу (рис. 2.13, б), состоящую из простой ступени z1/z2 с модулем mI и планетарной ступени 3-h с модулем mII .
Передаточное отношение простой ступени определяется по формуле (2.4). Передаточное отношение планетарного редуктора — формула (2.7). Общее передаточное отношение редуктора
—формула (2.5).
Зубчатую передачу z1/z2 необходимо проектировать с оп-
тимальным смещением. Цели смещения: вписывание в заданное межосевое расстояние, повышение износостойкости и изгибной прочности. Оптимизацию коэффициентов смещения и подбор чисел зубьев планетарного редуктора выполнить на ЭВМ.
При движении ползуна 5 в режиме рабочего хода (вниз) в направлении, обратном его направлению, действует сила производственного сопротивления FC2. В режиме холостого хода действует сила трения FC1. Момент движущих сил, развиваемый двигателем и приложенный к кривошипу, считать постоянным.
3. СТРУКТУРНЫЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
Цель структурного анализа — разложение рычажного механизма на структурные группы — группы Ассура. Такое разделение механизма на простые модули позволяет создать систему классификации рычажных механизмов и существенно облегчить определение кинематических и силовых параметров.
Группа Ассура — плоская кинематическая цепь с числом степеней свободы, равным нулю. Она содержит только низшие кинематические пары — вращательные и поступа-
тельные. Структурный анализ начинают с определения числа степеней свободы по формуле Чебышева:
W 3n 2 p1 p2 , |
(3.1) |
где n — число подвижных звеньев; p1 — число одноподвижных (низших) кинематических пар; p2 — число двухподвижных (высших) пар.
51
Число степеней свободы показывают, сколько начальных (чаще всего ведущих) звеньев останется после отсоединения групп Ассура. С учетом W = 0 и p2 = 0 формула группы Ассура имеет вид:
р1 = 3n/2. |
(3.2) |
Из формулы (3.2) следует, что в простейшей группе Ассу-
ра — два звена и три кинематических пары. Она относится ко II классу, так как в каждый контур (звено) входит по две пары, и ко второму порядку — в группе две потенциальные кинематические пары А и С. Ее обозначение в формуле строения механизма — II. Такие структурные группы находят широкое распространение в технике. Их называют двухповодковыми группами Ассура, или диадами, а механизмы, из них состоящие — диадными.
Базовой диаде присвоен первый вид — II1 (рис. 3.1). В ней все три кинематические пары вращательные.
Рис. 3.1
Остальные четыре вида получают заменой вращательных пар поступательными. Так, замена одной крайней вращательной пары поступательной образует диаду второго вида (рис. 3.2), замена средней вращательной пары поступательной — диаду третьего вида (рис. 3.3), двух крайних вращательных пар поступательными — диаду четвертого вида (рис. 3.4), одной крайней и одной средней вращательных пар поступательными
— диаду пятого вида (рис. 3.5).
52
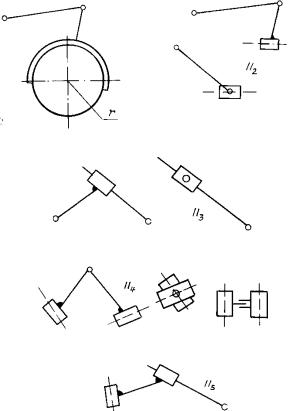
Рис. 3.2
Рис. 3.3
Рис. 3.4
Рис. 3.5
В заданиях на курсовой проект представлены диадные ме-
ханизмы. Отсоединение диад начинают с наиболее отдаленных от начального звена структурных групп. В механизме ДВС (рис. 2.1, а) обе диады примыкают к начальному звену. Каждая из них состоит из двух звеньев (2–3 и 4–5) и трех кинематических пар — двух вращательных и одной поступательной, образуя диады второго вида (II2).
После отсоединения двух диад остается начальный меха-
низм I класса (обозначение I) — кривошип со стойкой. Другой разновидностью механизма I класса является ползун со стойкой. Обе разновидности начальных механизмов приведены на
53
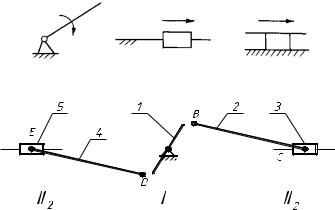
рис. 3.6. Диады и начальное звено механизма ДВС изображены на рис. 3.7.
Рис. 3.6
Рис. 3.7
Формула строения механизма, составленная из классов отсоединенных диад, имеет вид:
II2(4,5) – I(1) – II2(2,3).
В соответствии с формулой строения механизм ДВС является механизмом II класса, как и все диадные механизмы, представленные в заданиях на курсовой проект.
4. КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
4.1. Планы положений
Цель кинематического анализа: определение положений звеньев механизма, построение траекторий отдельных его точек, определение линейных скоростей и ускорений точек механизма, угловых скоростей и ускорений звеньев. Планы положений, скоростей и ускорений механизма являются эле-
ментами графического метода планов кинематического анализа.
Планом положений механизма называется графическое изображение взаимного расположения звеньев, соответствующее определенному положению начального звена. В курсо-
54

вом проекте принимают 12 положений кривошипа. План по-
ложений — кинематическая схема механизма, выполненная в масштабе.
Масштаб определяют отношением длины отрезка в миллиметрах, изображающего какую-либо физическую величину, к самой физической величине. Масштаб плана положений в мм/м:
l AB / lAB , |
(4.1) |
где АВ — длина отрезка, мм, изображающего длину lAB, м. Масштаб рекомендуется принимать исходя из возможно-
сти размещения изображений на первом листе формата А1. Так, для механизма ДВС (рис. 4.1) при условии изображения его поршней в верхних мертвых точках (ВМТ) масштаб плана положений:
l |
|
EC |
, |
(4.2) |
||
|
|
|||||
2(lAB |
lBC ) |
|||||
|
|
|
|
|||
где EC — максимальное расстояние между точками Е и С на плане положений, мм.
Например, для lAB = 0,09 м и lBC = 0,3 м габаритный размер механизма 2 (0,09 0,3) 0,78 м. Если для плана положе-
ний отведено EC = 360 мм, то его масштаб
l 0,36078 461 мм/м.
Рекомендуется принимать округленные значения масштабов для облегчения расчетов, например, l 450
мм/м. Как следует из формулы (4.1), в принятом масштабе l
отрезки, изображающие длины звеньев, равны:
AB lAB l ; BC lBC l ; BS2 lBS 2 l . |
(4.3) |
Следует помнить важное правило: для нанесения отрезка на план физическую величину умножают на масштаб. Построения начинают с нанесения на план элементов стойки:
неподвижных шарниров и направляющих. Прежде всего это центр вращения кривошипа 1 — точка А (рис. 4.1).
55
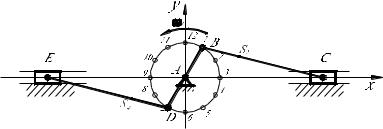
Рис. 4.1 |
Радиусом АВ описывают окружность — траекторию точки В, которую делят на 12 равных частей и ставят в них шарниры, обозначая цифрами в соответствии с часовым циферблатом. Через точку А проводят горизонтальную прямую
— траекторию движения ползунов.
Положения подвижных шарниров находят методом засе-
чек. Для этого раствором циркуля ВС с ножкой в точке В проводят ряд окружностей до пересечения с другими окружностями или направляющими. В пересечении ставят шарниры.
Траекторию центра тяжести шатуна получают соеди-
нением плавной кривой точек S2, нанесенных на положения шатунов путем откладывания отрезков ВS2. Фрагмент листа 1 с планом заданного положения приведен на рис. 4.2.
4.2. План скоростей
План скоростей — это векторный многоугольник, изображающий величины и направления скоростей точек меха-
низма в заданном положении начального звена. При исполь-
зовании компьютерных расчетов студент строит один план скоростей и один план ускорений. При отсутствии таких расчетов студент строит по 6 или 12 планов (по указанию руководителя проекта).
Начальное звено — это звено, которому задается обобщенная координата. Для кривошипа, совершающего полный оборот, это угол поворота 1 , отсчитываемый от положительного направления оси x в направлении против часовой стрелки.
56
Начальному звену также задается кинематический параметр — угловая скорость 1. Так как она задана постоянной, угловое ускорение кривошипа 1 равно нулю. Для технологических ма-
шин начальное звено — ведущее, для двигателей — ведомое, но для определения кинематических и силовых параметров это не принципиально. Основная цель назначения начального звена — упрощение расчетов.
По Ассуру плоский рычажный механизм может быть образован из начального механизма I класса и присоединен-
ных структурных групп. Так как кинематика начального зве-
на известна ( 1 , 1, 1), то кинематический анализ диадного
механизма сводится к исследованию кинематики групп Ассура.
57
Анализ плана положений механизма ДВС (рис. 4.2) показывает, что в диаде 2–3 неизвестна кинематика средней вращательной кинематической пары C, принадлежащей одновремен-
но звеньям 2 и 3. Таким образом, векторные уравнения теоремы о сложении скоростей составляют для внутренней кинематической пары группы Ассура. Система векторных уравнений в движении точки С относительно подвижной точки В, условно принятой за неподвижную, и неподвижной направляющей х–х:
|
|
|
|
|
|
|
|
|
|
|
|
|
B CB , |
|
|||||||||
C |
(4.4) |
||||||||||
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
. |
|
||||||
|
C |
|
|
x x |
|
|
Cx |
. |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где vB — абсолютная скорость точки В, м/с; vCB — относительная скорость вращательного движения; vx-x — скорость направляющей; в кривошипно-нолзунном механизме vx-x = 0; vCx — относительная скорость поступательного движения.
Векторы скорости рычажного звена направлены перпендикулярно звену в сторону вращения. Модуль линейной ско-
рости, м/с:
vB 1lAB . |
(4.5) |
Для ее изображения на плане выбирают масштаб плана скоростей v , мм/(м с-1):
|
pb |
, |
(4.6) |
v vB
где pb — отрезок на плане скоростей, изображающий скорость точки В, мм.
Длину отрезка pb принимают такой, чтобы получился масштаб, удобный для расчетов. Так, например, при скорости vB = 4,8 м/с можно принять длину pb = 96 мм. При этом масштаб
v = 96/4,8 =
=20 мм/(м с-1). Следует помнить, что на чертежах отрезки, изображающие различные физические величины (скорость v,
58