

книги / Теория механизмов и механика систем машин
..pdfПри несоблюдении указанных геометрических соотношений число степеней свободы механизма действительно равно нулю и движение звеньев невозможно.
Согласно формуле (1.2), в шарнирном четырехзвеннике (см. рис. 1.12) W = 1. Но если обусловленная неточностью изготовления непараллельность осей вращательных пар механизма не может быть компенсирована зазорами между элементами этих пар, то его следует рассматривать как пространственный механизм. И тогда согласно (1.7) число избыточных связей в этом механизме составит
q = 1 – 6·3 + 5·4 = 3.
0 4
Рис. 1.11. Механизм сдвоенного |
Рис. 1.12. Шарнирный |
параллелограмма |
четырехзвенник |
Сборка такого механизма возможна за счет деформации звеньев, а при его работе происходит усиленное изнашивание пар трением, появляется возможность заклинивания элементов кинематических пар.
Изменением подвижности кинематических пар можно устранить имеющиеся в механизме избыточные связи. Так, если в рассматриваемом шарнирном четырехзвеннике одну вращательную пару заменить сферической, а другую – сферической с пальцем либо одну вращательную пару заменить сферической, а другую – цилиндрической, то такие механизмы будут лишены избыточных связей. Для них
q = 1 – 6·3 + 5·2 + 4·1 + 3·1 = 0.
Для кривошипно-ползунного механизма (см. рис. 1.2, б) устранить избыточные связи можно, например, заменой вращательной пары «кривошип – шатун» сферической, а поступательной – цилиндрической. Возможны и другие варианты устранения избыточных связей в рассмотренных механизмах.
21
Механизм без избыточных связей можно собрать без натягов при любых неточностях изготовления, что уменьшает силы трения в кинематических парах, увеличивает срок службы и надежность механизма. Такой механизм легко приспосабливается к деформации основания.
1.6. Алгоритм проведения структурного анализа плоского механизма
1.Составить структурную схему механизма.
2.Определить степень подвижности механизма по формуле (1.2).
3.Заменить высшие пары низшими и определить число степеней свободы заменяющего механизма по формуле (1.2).
4.Разложить механизм на структурные группы. Разложение следует начинать с отсоединения простейшей группы Ассура, наиболее удаленной по кинематической цепи от входного звена. При этом число степеней свободы оставшейся кинематической цепи должно соответствовать числу степеней свободы исходного механизма. Если отсоединить структурную группу 2-го класса не удается, следует отсоединить группу 3-го класса и т.д. После отсоединения первой группы отсоединяют следующую группу и т.д.
В результате разложения остается одно входное звено со стойкой, если степень подвижности механизма равна единице. Если число степеней свободы механизма равно k, то должно остаться k входных звеньев.
5.Записать формулу строения механизма, показывающую, в какой последовательности и какие группы Ассура присоединены к механизму 1-го класса.
6.Определить класс и порядок всего механизма.
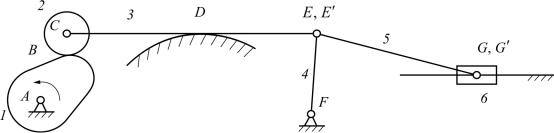
Приведем пример определения порядка структурного анализа плоского механизма, представляющего замкнутую кинематическую цепь (рис. 1.13).
Рис. 1.13. Плоский механизм замкнутой кинематической цепи: A, B, C, D, E, E', G, G', F — кинематические пары
1. Определим число степеней свободы механизма по формуле Чебыше-
ва (1.2):
22
W = 3n – 2p5 – p4.
Для данного механизма n = 6, p5 = 7, p4 = 2. В случае соединения нескольких звеньев (например, шарнир E) число кинематических пар определяется числом соединяемых звеньев, уменьшенным на единицу.
Так, в шарнире Е соединяются три звена, следовательно, число кинематических пар здесь p5 = 2.
Таким образом,
W = 3·6–2·7–2 = 2.
Формально это говорит о том, что для определенности движения всех звеньев механизма в нем должно быть два входных звена или одно входное звено с двумя заданными независимыми движениями.
Однако все звенья механизма совершают вполне определенное движение лишь при одном заданном движении одному из них (например, кулачку 1). Лишнее число степеней свободы механизма, получаемое при подсчете по формуле (1.2), обусловлено наличием ролика 2. Возможность вращения ролика 2 относительно стержня 3 не влияет на движение остальных звеньев механизма.
Если жестко закрепить ролик 2 на стержне 3, то при этом относительное движение остальных звеньев останется прежним, но число подвижных звеньев n и число кинематических пар 5-го класса p5 уменьшится на единицу (n = 5, p5 = 6), а число степеней свободы механизма окажется равным
W= 3 5–2 6–2 = 1.
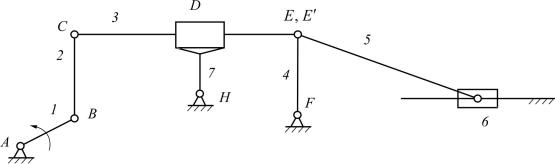
2.Производим замену высших кинематических пар B и D механизма эквивалентными кинематическими цепями с низшими парами в соответствии со схемами, приведенными на рис. 1.14.
На рис. 1.14 приведена схема заменяющего механизма. Число степеней
свободы этого механизма W = = 3 7–2 10 = 1.
G, G
Рис. 1.14. Структурная схема заменяющего механизма
23
3. Разложим механизм на струк- |
|
|
|
|
турные группы. Разложение начинаем |
|
|
|
|
с отсоединения простейшей группы |
|
|
|
|
Ассура, наиболее удаленной по кине- |
|
|
|
|
|
G, G |
|||
матической цепи от входного звена. |
|
|
|
|
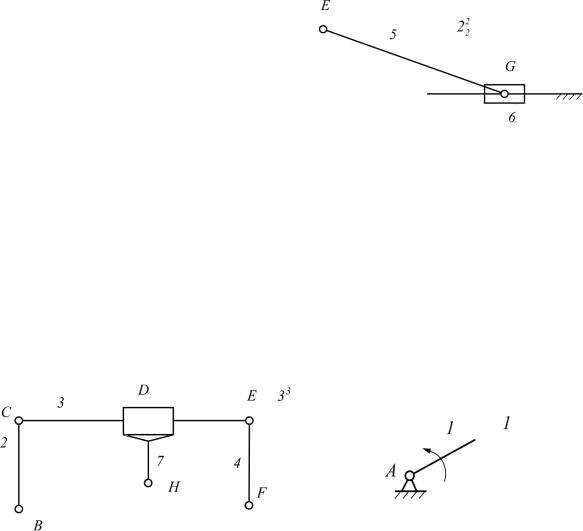
Это группа 2-го класса, 2-го порядка, |
|
|
|
|
2-го вида, содержащая звенья 5 и 6 |
Рис. 1.15. Структурная группа |
|||
(рис. 1.15). Оставшаяся кинематиче- |
||||
2-го класса 2-го порядка |
||||
ская цепь является замкнутой, ее сте- |
||||
|
|
|
||
пень подвижности W = 3 5–2 7 = 1, т.е.
осталась прежней. Значит, отсоединение выполнено правильно.
Дальнейшее отсоединение простейших групп невозможно. Так, отсоединение звеньев 3 и 4 или 3 и 7 приведет к размыканию кинематической цепи.
Если не удается отсоединить группу 2-го класса, пытаются отсоединить группу 3-го или 4-го классов, состоящую из четырех звеньев и шести кинематических пар. Так, звенья 2, 3, 4 и 7 образуют структурную группу 3-го класса 3-го порядка (рис. 1.16).
Рис. 1.16. Структурная группа |
Рис. 1.17. Механизм 1-го класса |
3-го класса 3-го порядка |
|
В результате разложения остался механизм 1-го класса (входное звено со стойкой), имеющий W = 1 (рис. 1.17). Формула строения механизма записывается в порядке присоединения структурных групп к ведущему звену:
1 33 222 .
Таким образом, данный механизм есть механизм 3-го класса 3-го порядка. Он образован последовательным присоединением к входному звену и стойке структурных групп 3-го класса 3-го порядка и 2-го класса 2-го порядка 2-го вида.
1.7. Структурный синтез пространственного механизма манипулятора
Подвижность манипулятора (рис. 1.18) характеризуется числом независимых движений, которое задается звеньям, чтобы движение выходного звена было вполне определенным.
24
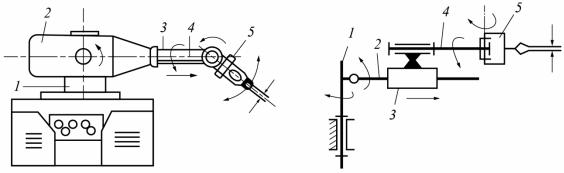
а |
б |
Рис. 1.18. Манипулятор: à — внешний вид; á — кинематическая схема; 1, 2, 3, 4, 5 — звенья
Для определения числа степеней подвижности манипулятора с голономными связями достаточно найти разность между общим числом координат, определяющих положение его звеньев, и числом независимых уравнений связей.
Если исполнительный механизм имеет pi кинематических пар, то общее число связей S, налагаемых на относительные движения звеньев, равно сумме числа связей всех пар:
5
S ipi .
i 1
Если все уравнения связей независимы, приходим к известной формуле Малышева для определения числа степеней подвижность:
5
W 6n ipi ,
i 1
где n – число подвижных звеньев.
Для незамкнутой кинематической цепи число связей
5
S pi (6 i).
i 1
В случае избыточных или пассивных связей число уравнений связей уменьшается:
5
S ipi q ,
i 1
где q – число избыточных связей, а число степеней подвижностей механизма определяется по формуле
25
5
W6n ipi q .
i1
При известном числе степеней свободы можно из последней формулы найти число избыточных связей:
5
qW 6n ipi .
i 1
Вманипуляторах избыточные связи могут появиться, например, при проектировании передаточного механизма для осуществления движения в шарнире основного механизма.
О.Г. Озол предложил формулу определения числа избыточных связей для многоконтурных механизмов:
q W 6k f ,
где k – число независимых контуров в механизме, отличающихся от других контуров по крайней мере одним звеном или кинематической парой; f – сумма подвижностей кинематических пар.
Под структурным синтезом манипулятора понимается проектирование его структурной схемы по заданным структурным условиям: типу, числу кинематических пар, виду движения перемещаемого объекта. Для реализации заданного движения объекта с числом степеней свободы W0 число степеней подвижностей манипулятора Wм не может быть меньше, чем W0:
Wм W0 .
Это условие позволяет решить задачу отбора цепей, имеющих минимальное число степеней свободы и обладающих полной подвижностью относительно заданного вида движения объекта.
Основной задачей структурного синтеза манипулятора является выбор числа звеньев, класса и порядка расположения кинематических пар.
Принцип наслоения механизмов предполагает построение на одном из подвижных звеньев нового механизма, при этом число степеней свободы всей системы увеличивается.
Комбинируя кинематические цепи, можно создать манипуляторы, выполняющие разнообразные функции.
26
2. СИНТЕЗ РЫЧАЖНО-ШАРНИРНЫХ МЕХАНИЗМОВ
2.1. Общие понятия
Задача синтеза плоских рычажно-шарнирных механизмов с низшими парами сводится к определению размеров звеньев, главным образом, расстояния между центрами шарниров. При этом размерная кинематическая цепь должна обеспечивать закон движения звеньев, положение последних в определенные моменты времени, траектории точек, соотношения скоростей различных точек или звеньев и т.д., предусмотренные в заданиях к проекту.
Для проектирования стержневых механизмов могут быть заданы:
1)ход ведомого звена (ползуна или коромысла);
2)коэффициент изменения средней скорости перемещения ведомого звена K;
3)максимальные допустимые углы давления в кинематических парах – α;
4)соответствующие крайние положения ведущего и ведомого звеньев
идр. Коэффициент K определяется как отношение времени (или скорости) перемещения ведомого звена в одном направлении к времени перемещения (или скорости) того же звена и в обратном направлении при равномерном вращении ведущего звена.
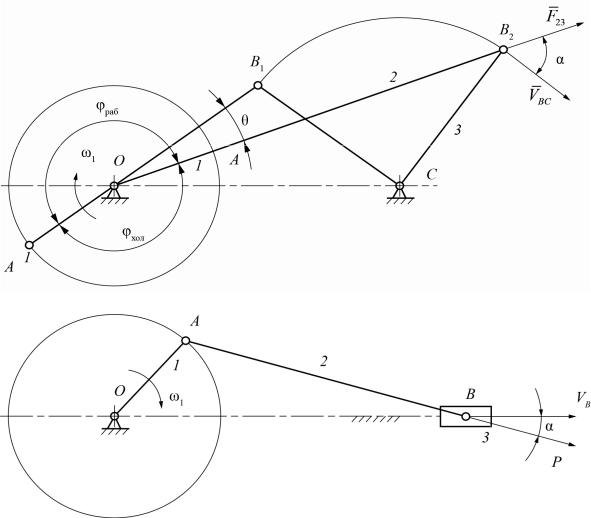
Коэффициент K можно выразить через углы поворота кривошипа φхол
иφраб (рис. 2.1, а), соответствующие прямому и обратному ходу ведомого звена. Угол θ образован крайними положениями шатуна.
K |
tраб |
|
V ср |
раб |
|
180 |
|
|
|||
|
|
|
хол |
|
|
|
|
|
; |
(2.1) |
|
t |
|
|
|
180 |
|||||||
|
хол |
|
V ср |
хол |
|
|
|
||||
|
|
|
раб |
|
|
|
|
|
|
||
|
|
|
180 |
K 1 |
. |
|
(2.2) |
||||
|
|
|
K 1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|||
Углом давления α называют угол между вектором силы и вектором скорости точки приложения этой силы (рис. 2.1, а, б).
При увеличении угла давления α уменьшается КПД механизма и возникает возможность заклинивания звеньев, поэтому при проектировании механизмов необходимо обеспечить условие, чтобы в любом его положении текущие значения угла давления не превышали допускаемого значения α.
27
а
б
Рис. 2.1. Определение углов поворота кривошипа и угла давления:
à— шарнирный четырехзвенник; á — кривошипно-ползунный механизм
2.2.Проектирование шарнирного четырехзвенника
1.Заданы длина коромысла ВС и расстояние между центрами коромысла и кривошипа ОС. Известны крайние положения коромысла, расположенные симметрично относительно направления, перпендикулярного линии центров ОС (рис. 2.2).
Определить длины кривошипа ОА и шатуна АВ.
Для определения длины кривошипа соединим крайние положения точки В с центром шарнира О. Искомая длина ОА и АВ найдется из соотношения
OB1 |
OA1 A1B1 |
|
, |
(2.3) |
||
OB |
|
A B OA |
|
|||
2 |
|
|
|
|||
|
2 2 |
2 |
|
|
||
28
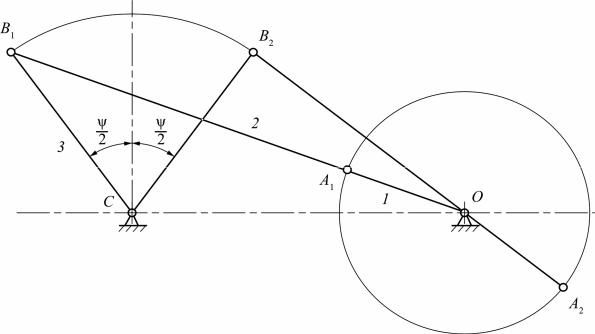
откуда
OA |
OB1 OB2 . |
(2.4) |
|
2 |
|
Если при заданном расстоянии ОС положение точки О относительно коромысла неизвестно, его можно выбрать произвольно, зная длину АВ.
Рис. 2.2. Схема шарнирного четырехзвенника
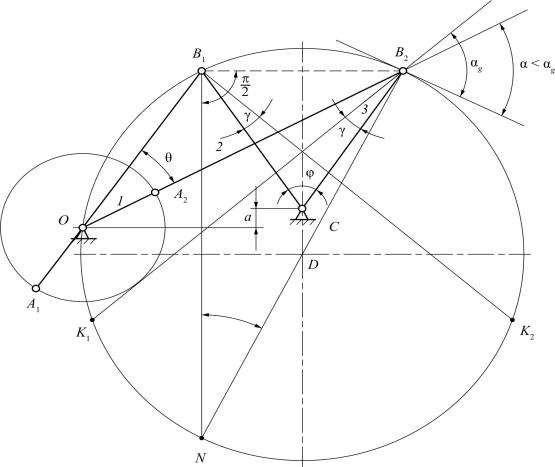
2. Заданы положения коромысла и коэффициент К изменения средней скорости.
Недостающие размеры звеньев определяются положениями шарнирных точек О и А (рис. 2.3).
Положение точки О определяется значением угла θ (см. рис. 2.3). Точка О лежит на дуге NB1B2 окружности, являющейся геометрическим местом вершин угла θ, опирающегося на хорду В1В2. Центр этой окружности (точка D) находится на середине гипотенузы прямоугольного треугольника В1NВ2, построенного на хорде В1В2.
Положение точки О на дуге окружности В1В2 может быть ограничено
лишь значением угла давления в крайних положениях.
Если задан угол αg, центр О следует выбирать на дугах В1К1 либо В2К2. Точки К1 и К2 определятся, если к направлениям коромысла в крайних положениях провести лучи под углом 90 g так, как это показано
на рис. 2.3.
29
θ
Рис. 2.3. Определение крайних положений кривошипно-шарнирного четырехзвенника
Данная задача имеет множество решений, если не задана длина одного из звеньев.
2.3. Проектирование кривошипно-ползунного механизма
Если заданы ход рабочего звена Smax и расстояние между осью вращения кривошипа и крайним правым положением ползуна xmax (рис. 2.4), то длину кривошипа r аксиального кривошипно-ползунного механизма определяют из соотношения
r OA |
Smax |
. |
|
(2.5) |
||
|
||||||
|
2 |
|
|
|
|
|
Длина шатуна |
|
|
|
|
|
|
AB l xmax |
Smax |
. |
(2.6) |
|||
2 |
||||||
|
|
|
|
|||
30