

книги / Строительная механика, динамика и устойчивость композитных конструкций
..pdfсовпадающие с естественными граничными условиями для уравнения Остроградского – Эйлера в вариационном подходе. Дополняя полученную систему уравнений начальными условиями
ui ui0 , |
ui |
ui0 |
при t = 0, |
(1.2.2.5) |
|
t |
|
|
|
приходим к точно такой же постановке краевой задачи динамики упругих конструкций, что и для вариационного подхода.
Полученные в разделах 1.2.1 и 1.2.2 постановки краевых задач динамики позволяют исследовать поведение плоских и пространственных тел при действии нестационарных нагрузок. В прикладных расчетах часто приходится проводить анализ стержневых и тонкостенных элементов конструкций, рассмотрим особенности получения определяющих соотношений динамики и для этих практически важных случаев.
1.2.3. Продольные колебания стержней
Стержень – одномерное упругое тело. Пусть ось Х – ось стержня, l – длина. Стержень совершает продольные колебания, тогда перемещения точек, лежащих в плоскости одного перпендикулярного оси стержня сечения, являются одинаковыми. Получим уравнение движения, используя вариационный принцип Гамильтона:
U |
1 l |
|
u 2 |
|
||
|
EF |
|
dx, |
|
||
|
2 |
0 |
|
x |
|
(1.2.3.1) |
|
1 l |
u 2 |
||||
T |
|
|||||
2 |
|
F |
dx, |
|
||
|
0 |
|
t |
|
|
|
где E – модуль Юнга, F – площадь поперечного сечения.
П l |
qudx Nu |
|
l0 , |
(1.2.3.2) |
|
||||
|
||||
0 |
|
|
|
|
где q – продольная распределенная нагрузка, N – нагрузка на торцах стержня. Используя уравнение Остроградского – Эйлера, получаем уравнение движения
21

|
|
u |
|
2u |
q x,t , |
|
||
|
|
EF |
|
F |
t |
2 |
(1.2.3.3) |
|
|
||||||||
|
x |
x |
|
|
|
|
||
известное в математической физике как волновое уравнение. Типичные граничные условия для задачи продольных коле-
баний стержня:
1. |
жесткая заделка |
u = 0. |
|
|
|
|
|
|
2. |
свободный конец |
EF |
u |
|
0. |
|
|
|
x |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
3. |
сила на конце |
EF |
u |
|
N. |
|
|
|
x |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
4. |
масса на конце стержня |
EF |
u |
|
М |
2u |
. |
|
x |
|
t |
2 |
|||||
|
|
|
|
|
|
|||
5.на конце упругое закреп- EF u Cu*) . ление x
1.2.4. Крутильные колебания стержней
Принимаем гипотезу плоских сечений стержня при кручении, пусть (x,t) – угол закручивания. Получим уравнение движения,
используя вариационный принцип Гамильтона
U |
1 l |
|
|
|
(1.2.4.1) |
GJ |
0 |
|
dx, |
||
|
2 0 |
|
|
||
|
|
|
x |
|
где G – модуль сдвига; J0 – полярный момент инерции
T |
1 l |
J0 |
|
|
dx, |
(1.2.4.2) |
||
2 0 |
|
|
||||||
|
|
|
t |
|
|
|
|
|
П l |
dx M |
|
l0 , |
(1.2.4.3) |
||||
|
||||||||
|
|
|||||||
|
0 |
|
|
|
|
|
|
|
где – распределенный крутящий момент; M – крутящий момент на концах стержня. Используя уравнение Остроградского – Эй-
22
лера, получаем волновое уравнение, описывающее процесс крутильных колебаний стержня
|
|
|
|
2 |
x,t |
. |
|
|
|
|
||||
|
|
|
GJ0 |
J0 |
t |
|
(1.2.4.4) |
|||||||
|
|
|
||||||||||||
|
|
x |
x |
|
|
|
|
|
|
|
|
|
||
Типичные граничные условия для задачи крутильных коле- |
||||||||||||||
баний стержней: |
|
|
|
|
|
0 . |
|
|
|
|
||||
1. |
Жесткая заделка |
|
|
|
|
|
|
|
||||||
2. |
Свободный конец |
|
|
|
GJ |
0 |
|
|
0 . |
|
|
|
||
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
3. |
Крутящий момент на конце |
|
|
GJ |
|
|
|
М . |
|
|
|
|||
|
|
0 |
|
x |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4. |
Инерционный элемент на конце |
GJ |
|
|
|
J |
2 |
|
. |
|||||
0 |
|
x |
t |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
5. |
Упругое закрепление на конце |
|
GJ |
0 |
|
|
C . |
|
|
|||||
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
1.2.5. Изгибные колебания стержней
Примем гипотезу плоских сечений, перпендикулярных изогнутой оси стержня. Получим уравнение движения, используя вариационный принцип Гамильтона
U |
1 l |
|
2 w |
(1.2.5.1) |
||||
2 |
EJ |
x |
2 |
|
dx, |
|||
|
0 |
|
|
|
|
|
||
где w – прогиб стержня, перемещение перпендикулярное оси x; J – осевой момент инерции сечения стержня
T |
1 |
|
|
w |
dx, |
(1.2.5.2) |
||
2 |
F |
|
||||||
|
|
t |
|
|
|
|
||
П l |
dwdx Qw |
|
l0 , |
(1.2.5.3) |
||||
|
||||||||
|
|
|||||||
|
|
0 |
|
|
|
|
|
|
где q – поперечная распределенная нагрузка по длине стержня; Q – перерезывающее усилие на боковых гранях. Используя урав-
23
нение Остроградского – Эйлера, получим уравнение изгибных колебаний стержня
2 |
|
d 2 w |
|
d 2 w |
q x,t . |
(1.2.5.4) |
||||
|
|
EJ |
|
2 |
|
F |
|
2 |
||
x |
2 |
dx |
dt |
|||||||
|
|
|
|
|
|
|
|
|||
По сравнению с продольными и крутильными колебаниями увеличивается порядок частных производных по х, следовательно, необходимо большее число граничных условий.
Типичные граничные условия в задаче изгибных колебаний стержней:
1.Жесткая заделка
2.Шарнирное опирание
3.Свободный конец
4.Сосредоточенная массас
w 0;
w 0;
EJ 2 w
x2
EJx
w |
0 . |
|
|
|
|
|
|
|
||||
x |
2 w |
|
|
|
|
|
|
|
|
|||
EJ |
|
0 . |
|
|
|
|
|
|||||
|
x2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
0; |
|
|
|
|
2 w |
|
||||||
|
|
|
EJ |
x |
2 |
|
0 . |
|||||
|
|
|
||||||||||
|
|
|
|
x |
|
|
|
|
||||
2 w |
|
m |
2 w |
; |
|
|
||||||
x |
2 |
|
t |
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
EJ 2 w I 3w .
x2 x t2
1.2.6. Колебания криволинейных стержней
Введем следующие обозначения: S – криволинейная ось
стержня; R(S) – радиус кривизны; max r 1; u(S) – перемеще-
R
ние вдоль оси S стержня; w(S) – перемещение поперек оси стрежня. Тогда выражения для составляющих полной энергии системы будут иметь вид
U U1 U2 |
|
1 l |
|
|
u |
|
w 2 |
|||||
2 0 |
EF |
s |
|
dS |
||||||||
|
|
|
|
|
|
|
|
R |
||||
|
1 l |
|
2 w |
|
|
u |
2 |
|||||
|
|
EJ |
|
|
|
|
|
|
|
dS; |
||
|
|
|
|
|
||||||||
|
2 |
0 |
|
|
s |
|
s R |
|
||||
24
T |
1 l |
|
u 2 |
|
w 2 |
2 |
(1.2.6.1) |
||
|
0 |
F |
|
|
|
|
dS. |
||
|
2 |
|
t |
|
t |
|
|
|
|
Так как динамическое поведение стержня характеризуется функциями U(S) и w(S), получим систему двух уравнений Остроградского – Эйлера
|
|
|
|
u |
|
w |
|
|
|
|
EJ |
2 w |
|
u |
|
|
||||||||||||
|
|
EF |
S |
|
R |
|
|
|
|
|
|
|
S |
2 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
|
S |
|
|
|
|
|
S |
R |
|
|
|
S |
R |
|
|
|||||||||||||
|
|
|
|
|
|
F |
2u |
q S,t ; |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
t2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
u |
|
w |
|
|
2 |
EJ |
|
2 w |
|
|
|
u |
|
|
||||||||||||
|
EF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||
|
S |
|
|
S |
2 |
R |
S |
S |
|
|
|
|
||||||||||||||||
|
|
|
|
R |
|
|
|
|
|
|
|
|
R |
|
(1.2.6.2) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
2u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
F |
q |
S,t . |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
t2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Граничные условия принимаются такие же, как в случае изгиба стержня, но вместо x надо принять S.
1.2.7. Изгибные колебания пластин
Пластина – тело, у которого один из размеров (толщина) много меньше двух других размеров и координатная поверхность которого – плоскость. Динамическое поведение рассмотрим в рамках технической теории изгиба анизотропных пластин (модель Кирхгофа – Лява). Согласно данной модели:
–деформация пластины определяется только прогибом;
–нормаль к срединной поверхности после деформирования остается нормальной, прямолинейной и сохраняет свою длину;
–срединная поверхность не деформируется;
–прогибы пластин малы.
Энергия деформирования определяется следующим образом:
U 12 |
M x x M y y 2M xy xy dxdy, |
(1.2.7.1) |
|
|
|
25
где – площадь пластины; M x , M y – изгибающие моменты; M xy – крутящий момент; x , y , xy , – обобщенные изгибные де-
формации (кривизны).
Для ортотропной пластины упругие соотношения:
M X |
D11 |
||
|
|
|
|
|
MY |
D21 |
|
|
|
|
0 |
M XY |
|
||
где Dij – изгибные жесткости:
D12 |
0 |
|
X |
|
|
|
D22 |
0 |
|
|
|
, |
(1.2.7.2) |
|
Y |
|||||
|
|
|
|
|
|
|
0 |
D66 |
|
|
|
||
|
XY |
|
|
|||
D С |
h3 |
– однородная анизотропная пластина; |
|||||
ij 12 |
|||||||
ij |
|
|
|
|
|
||
|
|
1 |
n |
|
zi3 1 |
|
|
Dij |
|
Сij(k ) zi3 |
– слоистая пластина. |
||||
|
|
3 k 1 |
|
|
|
||
Исключая момент из выражения энергии деформирования, получим
U 1 |
|
D |
|
X |
2 |
2D |
X |
|
Y |
|
|
2 |
11 |
|
|
12 |
|
|
(1.2.7.3) |
||||
|
|
|
|
X Y 2 dxdy. |
|||||||
D22 Y 2 |
2D66 |
|
|||||||||
Прогибы пластин малы, следовательно, кривизны пропорциональны вторым частным производным прогиба по пространственным координатам
|
x |
|
2 w |
|
; |
y |
|
2 w |
; |
xy |
|
|
2 w |
; |
|||||||||||||||
x2 |
|
y2 |
|
|
x y |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
U |
1 |
|
|
|
|
|
2 w |
2 |
|
|
|
|
|
2 w 2 w |
|
||||||||||||||
|
D |
|
|
|
|
2 |
|
2D |
|
|
|
|
|
|
2 |
|
|
2 |
|||||||||||
|
|
|
2 |
|
11 |
|
x |
|
|
|
12 |
x |
y |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
2 |
w |
2 |
|
|
|
|
|
|
2 |
w |
|
2 |
|
|
|
|
|
|
||||||
D |
|
|
|
2D |
|
|
|
dxdy. |
|
||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
22 |
y |
|
|
|
|
|
66 |
x y |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
(1.2.7.4)
(1.2.7.5)
26
Кинетическая энергия (без учета вращений)
Т |
1 |
|
|
w 2 |
d . |
(1.2.7.6) |
|
2 |
h |
t |
|
||||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Потенциал внешних усилий (распределенная нагрузка по поверхности q(x,y,t))
П qwdxdy. |
(1.2.7.7) |
|
|
Подставляя полученные выражения в интеграл |
действия |
и составляя уравнения Остроградского – Эйлера для функционала, получим
D |
4 w |
2D |
4 w |
D |
4 w |
h |
2 w |
q. |
|
|
|
|
t2 |
(1.2.7.8) |
|||||
11 x4 |
* x4 y4 |
22 y4 |
|
|
|||||
D* D12 2D66 .
Получили уравнение движения ортотропной пластины при изгибе. Условия на контуре (по два условия):
–жесткая заделка;
–шарнир;
–начальные условия;
– свободный край:
свелла.
|
M n 0 |
|
|
|
||
|
|
M ns |
|
|
– условие Мак- |
|
|
|
|
||||
Qn |
|
|
|
0 |
|
|
S |
|
|||||
|
|
|
|
|
||
1.2.8. Динамическое поведение оболочек
Ограничимся анализом осесимметричных оболочек; вектор перемещений в этом случае описывается двумя компонентами: u – смещение точек срединной поверхности вдоль образующей S; w – смещение точек срединной поверхности вдоль нормали n (рис. 1.7). В оболочке действуют изгибающие моменты Ms и M
и усилия в срединной поверхности Ns и N .
От действия изгибающих моментов изменяется серединная поверхность, от усилий возникают продольные деформации.
27
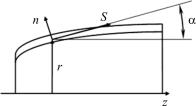
Рис. 1.7. Координатная система осесимметричной оболочки
U |
1 l NS S N M S S M 2 dS, (1.2.8.1) |
|
2 0 |
где l – длина оболочки по меридиану. Упругие соотношения:
N |
S |
|
|
С' |
|
N |
|
|
|
11 |
|
|
|
|
С' |
||
|
|
|
|
12 |
|
M |
|
|
B |
||
|
S |
|
|
11 |
|
М |
|
|
|||
|
B |
||||
|
|
|
|||
|
|
12 |
|||
С' |
B |
B |
|
S |
|
|
|
|
12 |
11 |
12 |
|
|
|
|
|
|
С' |
B |
B |
|
|
|
|||
22 |
12 |
22 |
|
|
|
, |
(1.2.8.2) |
|
B12 |
D11 |
D12 |
|
|
|
|
||
S |
|
|
||||||
B |
D |
D |
|
|
|
|
|
|
|
|
|
|
|||||
22 |
21 |
22 |
|
|
|
|
|
|
где для однородной ортотропной оболочки:
Сij' Cij h; Сij |
1 |
E |
|
|
h3 |
|
|
|
; Bij 0; Dij Cij 12 ; (1.2.8.3) |
||||
|
|
|
11 |
|
|
|
|
|
|
12 |
|
21 |
|
при этом Bij 0, если координатная поверхность является сре-
динной поверхностью.
Связь деформаций с перемещениями:
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
S |
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
||||
wcos u sin |
|
|||||||
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
(1.2.8.4) |
|||
|
|
|
|
|
|
|
. |
|
S |
|
|
|
2 w |
|
|
||
|
|
|
|
S |
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
sin w |
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
r S |
|
|
||
|
|
|
|
|
|
|
||
28
Подставляя геометрические и физические соотношения в вы-
ражения для энергии деформирования, получаем: |
|
|||||||
|
|
U U u(S),W (S) . |
|
(1.2.8.5) |
||||
Кинетическая энергия: |
|
|
|
|
|
|||
T |
1 |
е |
|
u 2 |
|
w 2 |
|
(1.2.8.6) |
|
0 |
h2 |
|
|
|
dS. |
||
|
2 |
|
t |
|
t |
|
|
|
Потенциал высших сил (распределенное давление на поверх- |
||||||||
ность оболочки q(S, t): |
|
|
|
|
|
|
|
|
|
|
П е q(s,t)w2 dS. |
|
(1.2.8.7) |
||||
|
|
|
0 |
|
|
|
|
|
Подставляя выражения для U, T, П в функционал и сопоставляя для него систему уравнений Остроградского – Эйлера, получаем уравнения движения тонкой анизотропной оболочки (получается система двух дифференциальных уравнений в частных производных относительно функций u(S,t) и w(S,t)).
Граничные и начальные условия формулируются традиционно и приводят к постановке краевой задачи динамики осесимметричной оболочки.
1.2.9. Свободные колебания упругих систем
Анализ полученных ранее уравнений движения упругих систем (плоских и объемных, стержневых и тонкостенных конструкций) показывает, что общая запись уравнений динамики может иметь вид
A |
2 |
u |
|
|
|
|
|
(1.2.9.1) |
|
C |
u |
F, |
|||||||
t2 |
|||||||||
|
|
|
|
|
|
|
|||
где А и С дифференциальные операторы, инерционный и упругий соответственно, u (r ,t) – поле перемещений, F (t) – внешняя нестационарная нагрузка.
29

В случае свободных колебаний упругих систем получается, что внешние нагрузки отсутствуют F(t) 0 . В этом случае необходимо исследоватьоднородное дифференциальноеуравнение вида:
A |
2u |
C |
u |
0. |
(1.2.9.2) |
||
t |
2 |
||||||
|
|
|
|
|
|||
Так как свободные колебания совершаются по гармоническому закону, то общее решение однородного дифференциального уравнения будем искать в виде:
u |
r ,t r sin t . |
(1.2.9.3) |
Подставляя вид решения (1.67) в уравнение (1.66) получим
(C 2 A) 0. |
(1.2.9.4) |
Значения параметра 2 , при которых уравнение (1.2.9.4) имеет решение, отличное от , называют собственными значениями ( , в свою очередь, называют собственными частотами). Функции , соответствующие собственным значениям 2 , называются собственными элементами уравнения (1.68), определяющими собственные формулы колебаний упругой системы. Совокупность собственных частот уравнения (1.2.9.4) называют спектром. Спектр собственных частот обычно упорядочивают в порядке возрастания 1 2 3 K, причем, 1 – первая (низшая) собственная частота. Собственным формам присваивают номера соответствующих частот, например 1 – первая форма свободных колебаний механической системы.
Собственные формы i определяют общее решение уравне-
ния (1.2.9.4) (так называемый полный базис) в виде ряда: |
|
r u r |
(1.2.9.5) |
i i |
|
где i = 1,2 K, ui – константы.
30